
国際特許分類[B63B49/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶またはその他の水上浮揚構造物;艤装品 (4,322) | 航海用具または航行用補助具の配置 (169)
国際特許分類[B63B49/00]に分類される特許
61 - 70 / 169
船舶の電流モーメント解析装置
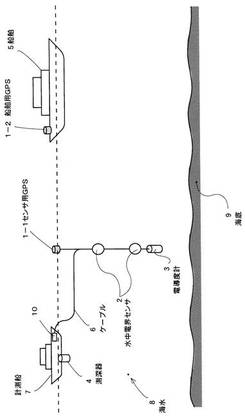
【課題】従来より精度良く電流モーメントを求め得る電流モーメント解析装置を提供する
【解決手段】近傍を被測定船舶5が通過する際に水中電界センサ2の出力波形の0クロス点を検出し、この0クロス点検出時に得られる水中電界センサ2の位置情報と被測定船舶5の位置情報とにより、被測定船舶5の電流源の中間位置を導出し、この中間位置と電流源(−側)の位置から被測定船舶5の電流源間隔Lを求め、水中電界センサ2の出力波形のピークtoピーク値Vaを記憶しておき、次に同一条件として、電流値I〔A〕のときの水中電界センサ2の出力波形をシミュレーションで導出し、そのときのピークtoピーク値Vbを求め、さらに前記条件で波形がピークtoピーク値Vaとなる電流値I=Va/Vbとして求めることにより、被測定船舶5の電流値Iを求めることにより、船舶の電流モーメント(L×I)を求める。
(もっと読む)
撮像装置、視界支援装置、暗視装置、航海支援装置および監視装置

【課題】 昼夜によらずノイズや暗電流を抑制して鮮明な画像を得ることができる撮像装置、視界支援装置、暗視装置、航海支援装置および監視装置を提供する。
【解決手段】 多重量子井戸構造の受光層3と、拡散濃度分布調整層4とを備え、受光層のバンドギャップ波長が1.65μm〜3μmであり、拡散濃度分布調整層のバンドギャップエネルギがInPよりも小さく、不純物元素の選択拡散によって受光素子ごとにpn接合を形成し、受光層における不純物濃度が、5×1016/cm3以下であり、拡散濃度分布調整層の拡散前のn型不純物濃度が2×1015/cm3以下であって受光層側の厚み範囲に低い不純物濃度範囲を有することを特徴とする。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
水中音響機器取付方法及びその装置
【課題】プラットホームの動揺に影響されず姿勢を維持できる水中音響機器取付方法及びその装置を提供する。
【解決手段】プラットホーム5の水中部分にジンバル機構2を取付け、ジンバル機構2に球殻状のカプセル3を取付け、カプセル3内に液体を充填し、カプセル3内に水中音響機器4を取付ける。
(もっと読む)
航法装置
【課題】 自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 各表示状態の表示を行う画面における任意の点を指定するために、画面の中を移動可能で任意の点を通るカーソルを表示するカーソル表示手段と、カーソルの移動中はカーソルを画面の横方向全体にわたる横線と画面の縦方向全体にわたる縦線とによる大形のカーソルにより表示し、カーソルの停止中はカーソルを任意の点の部分のみ指示する小形のカーソルにより表示する大小カーソル表示手段とを具備している。
(もっと読む)
航法装置
【課題】自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで記憶を行い、所定値に満たないときは所定の距離間隔ごとに取り込んで記憶を行う取込記憶手段とを具備している。
(もっと読む)
航法装置
【課題】 自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 各航行関連情報に付随する各所定の地点を大略的に識別するための各所定の地点を囲む図形を表示するとともに、図形の中の各所定の地点の真の位置を指示するための図形を表示する地点識別図形表示手段を具備し、地点を囲む図形を円形または多角形による第1の図形とし、真の位置を指示するための図形を第1の図形よりも小さい点状または十文字状の第2の図形としたことを特徴としている。
(もっと読む)
コンピュータ支援による船舶操縦方法
【課題】信頼できる船舶操縦方法を提供すること。
【解決手段】接岸時の操船において、船舶の位置と動きが、移動または静止している障害物または障害輪郭とともに、自動的に冗長手段によって把握され、コンピュータによって画像表示が制御されることにより、前記画像表示上において前記障害物または前記障害輪郭に対する前記船舶の実際の位置が、実行されているまたは推奨されている操縦操作とともに表示されることとする。
(もっと読む)
バージ船押航遠隔監視システム
【課題】押船の位置情報、航海情報や固有情報の他に、周辺海上の波浪や風の画像情報、押航中のバージ船や積荷の画像情報をリアルタイムに把握可能なバージ船押航遠隔監視システムを提供する。
【解決手段】押船の操縦室以上の高さ位置に、バージ船やその周辺海上を撮像するカメラを据え付けるとともに、押船に船舶自動識別システムを搭載するようにしたので、押船の位置情報、航海情報や固有情報の他に、周辺海上の波浪や風の画像情報、押航中のバージ船や積荷の画像情報をリアルタイムに把握することができる。
(もっと読む)
輸送方式を最適化するための方法
貨物の最適な輸送のための方法および装置が提供される。この方法は、複数の輸送決定項目を最適化するステップと、1組の最適化された輸送決定項目に従って複数のビークルを移動させることによって貨物を機械的に輸送するステップとを含む。決定項目としては、輸送ビークルに関する輸送ルートおよびスケジュール、輸送ビークルによって1つまたは複数の需要地点に輸送すべき貨物の配分、1つまたは複数の供給地点からの輸送ビークルによる荷積みのノミネーション、特殊化された輸送地点の使用、および各輸送ビークルに関するビークル割当てが挙げられる。決定項目の組は、様々な輸送決定項目に関係するデータを収集し、収集されたデータを混合整数線形計画モデルの一部として使用し、1組の最適化された輸送決定項目を見出すためにモデルに対する解を得ることによって最適化される。  (もっと読む)
(もっと読む)
61 - 70 / 169
[ Back to top ]