
国際特許分類[B63B49/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶またはその他の水上浮揚構造物;艤装品 (4,322) | 航海用具または航行用補助具の配置 (169)
国際特許分類[B63B49/00]に分類される特許
81 - 90 / 169
操縦支援装置
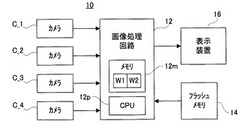
【課題】カメラの設置場所および/または移動体の形状によっては、カメラによって捉えられたものの表示画像には現れない死角が移動体の周辺に生まれ、これによって操縦性が低下するおそれがあるため、操縦性を向上させる。
【解決手段】カメラC_1〜C_4の各々は、船体の側面に下向きの姿勢で設けられて船舶の周辺を捉える。CPU12pは、船舶の周辺を鳥瞰的に表す全周鳥瞰図画像をカメラC_1〜C_4の出力に基づいて作成する。CPU12pはまた、鳥瞰された船舶の少なくとも外延を表すグラフィック画像を全周鳥瞰図画像に透過的に多重する。CPU12pはさらに、鳥瞰された船舶の一部を表すグラフィック画像を全周鳥瞰図画像に非透過的に多重する。
(もっと読む)
電気推進船の系統安定化システム

【課題】ラフシー等の異常環境下において、電気推進船の系統に対する負荷変動を適切に抑制し、発電機トリップ等に起因する停電や発電機用駆動装置の故障といった最悪のケースを回避する。
【解決手段】電気推進船に設けられたプロペラ1等の負荷設備を駆動する電動機2と、発電機3から系統に対して供給された電力を、所望の電圧及び周波数に変換して、電動機2を制御するインバータ9と、電気推進船の近傍に発生している波の高さ及び周期を検出する波検出器13と、波検出器13によって検出された波高及び波周期に基づき、ラフシー等の異常環境を予測する系統安定化装置10とを備える。そして、上記系統安定化装置10は、異常環境を予測すると、インバータ9に対して運転上限速度の制限を課し、電動機2の最大負荷電流を低減させる。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、第1及び第2ペイロードの大きさ及び位置が異なる場合に、俯仰軸部の第1及び第2端部で発生する外乱トルクにアンバランスが生じ、姿勢制御部による姿勢制御が乱されて、姿勢制御の安定性が低下してしまう。
【解決手段】本発明による空間安定装置は、第1及び第2ペイロード31,32の姿勢を示す姿勢制御部41からの姿勢情報41aと、風61の向き及び速度を示す風検出器60からの風情報60aとに基づいて、第1及び第2風圧制御器51,52の可動片の角度を制御して、風61によって俯仰軸部22の第1及び第2端部221,222で発生する風圧を互いに等しくする構成である。
(もっと読む)
目視認識支援装置及び目視認識支援方法
【課題】操船者の目視と表示画像との差異をなくして目視上の他船の同定を容易化することで、操船者の監視負担を軽減し、より安全な操船を可能とする。
【解決手段】目視認識支援装置1は、覆域海面の船舶の周囲環境、他船状況に関するレーダー情報を取得するレーダー装置と、レーダー情報の水平面表示する平面情報表示器11と、レーダー情報に基づき目視景観に重ねて重畳画像を表示する重畳画像表示器34と、水平方向に回動可能な架台部22と、架台部の回動を検出する回転角検出手段と、レーダー装置により取得されたレーダー情報から平面表示情報を得るとともに平面表示情報あるいはレーダー情報に光学幾何補正を加えて重畳表示情報を得る表示情報導出器と、得られた平面表示情報及び重畳表示情報に基づき、平面情報表示器及び重畳画像表示器に画像を回転角検出手段により検出される架台の回動に連動して表示する画像源器12とを具備する。
(もっと読む)
船舶の運航支援システムと船舶の運航支援方法
【課題】実海域での船体性能を精度よく推定して、実運航にフィードバックすることで、燃費を向上し、CO2排出量の削減し、到着予定時刻(ETA)の精度を向上し、効果的な修繕計画を立てることができる船舶の運航支援システム及び船舶の運航支援方法を提供する。
【解決手段】運航モニタリングシステム10が収集した就航データ等を、就航解析システム20が入力して、最新の推定性能の情報等のデータを出力し、このデータと航路で予測される気象等の情報のデータを最適航路計算システム30が入力して、最適航路に関する航海計画の情報等のデータを算出し、このデータと、スポット気象、海象の情報等のデータとを前記運航モニタリングシステム10が入力して前記就航データ等を算出するように形成し、前記運航モニタリングシステム10と前記就航解析システム20と前記最適航路計算システム30で解析サイクルを形成する。
(もっと読む)
船舶の航行状態分析装置
【課題】船舶の航行条件および外乱条件に応じた船舶の燃費の変化をリアルタイムに分析し得るようにする。
【解決手段】船舶の航行条件および航行時に船舶に加わる外乱条件に基づいて所定時間における燃費の変化と対地速度の変化が燃費指標表示部に表示される。対水速度と対地速度と船舶の前進方向と横方向の対水速度の所定時間における変化が対地対水速度表示部と対水速度表示部に表示され、斜航表示部には船舶の針路と対地コースが表示され、舵角表示部には舵角の変化と対地速度の変化が表示される。風向風圧表示部には風圧と風向の所定時間における変化が表示され、動揺表示部には波浪の影響によるピッチングとローリングの角度の変化が表示される。このように、船舶航行時に加わる種々の外乱に応じた燃費の変化に基づいて船舶の航行状態が分析される。
(もっと読む)
電界測定システム
【課題】 3軸電界センサの計測データにより、電気モーメントとみなせる目標体の運動方向、向きが特定でき、運動パターンを区別し得る電界測定システムを提供する。
【解決手段】同一平面上に第1の電界センサSAと第2の電界センサSBとを配置しておき、配置領域内を運動目標体が通過すると、第1と第2の電界センサSA、SBで目標体によるXY軸の電界データをデータ処理装置に取り込み、X軸とY軸の電界から電界ベクトル回転角を求め、所定時間経過後のベクトル回転角の変化から電界ベクトル回転方向の正負の別を求め、求めた第1と第2の電界センサSA,SBに係る電界ベクトル回転方向の正負の別の組み合わせから目標体の運動コース1〜4を特定する。
(もっと読む)
船舶の風圧抵抗低減方法及び船舶
【課題】監視装置で船首前方又は舷側の視界を確保しつつ、空気抵抗を減少して推進効率を向上できると共に、船橋及び居住区構造物における振動を軽減し易く、これらの構造物の重量を減少できて軽量化を図れる船舶の風圧抵抗低減方法及び船舶を提供する。
【解決手段】水上のみを航行する船舶1において、監視装置8を設けて、このデータを操舵室3a内に表示して、操舵室3a内で船体の周囲を監視できるように構成すると共に、操舵室3aの高さを、操舵室内の監視位置Paより前方の水面を見通すことが出来ない距離Smが、基準距離S0よりも大きくなる高さに形成するか、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、船橋ウイングを設けないようにするかの少なくとも一つを行って、船橋3及び居住区7の構造物の風圧抵抗を減少する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】
従来の運動予測方式は、自身が等速直線運動をしている場合は良好な自身と追尾目標の相対針路および相対速度の予測ができ、安定した相対ベクトルの表示ができたが、自身が変針又は変速した場合には応答が非常に遅くなり、自身と追尾目標の相対ベクトルの表示が実際の相対針路や相対速度と大きく異なることがあった。
【解決手段】
対地固定された比較目標を追尾し、メモリに蓄積されたデータより観測時間を変えて追尾情報を演算し、追尾情報から自身の真ベクトルを演算し、自身の真ベクトルの検出装置より得られた自身の真ベクトルと比較し、最適観測時間を演算し、自身と追尾目標の相対ベクトルを演算、表示する。さらに、追尾目標の真ベクトルの変化検出を行い、追尾目標の真ベクトルの変化による自身と追尾目標の相対ベクトルの変化を検出する。
(もっと読む)
調節可能な音響反射器
航法目的で、ロケーションおよびリロケーション用途で、反射ターゲットとして使用するのに適した音響反射器を提供する。音響反射器は、固体コアを取り囲むように配置されたシェルを備える。シェルは、シェルに入射する音響波をコアに伝播するようになされる。コア内では、音響波はシェルの反対側面から反射される前に集束されて、反射音響波を生成する。シェルは、シェルに入射する音響波が再放射されて構成的に合成し、1つ以上の所定の周波数の増幅反射音響波を生成する前に、コア内で別個の経路をたどるように、少なくとも2つの伝播領域を有する。  (もっと読む)
(もっと読む)
81 - 90 / 169
[ Back to top ]