
国際特許分類[B63C11/48]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361) | 水中物の探索装置 (79)
国際特許分類[B63C11/48]の下位に属する分類
水中観察装置を有する浮揚構造物,例.窓を有するもの (5)
錨を用いるもの (1)
国際特許分類[B63C11/48]に分類される特許
41 - 50 / 73
ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法
【課題】水中の装置の位置を測定するにつき、水中での音波の屈曲により測定値の不正確が生ずる。
【解決手段】音響アレイに音速メータを備え、音響アレイによる出力データを処理構成で計算して水中の装置の位置を求めるとともに、船の直下の流体層内の音の速度を音速メータで測定して、これにより、処理構成が水中の装置の位置の計算を補正して、正確な位置を検出する。
(もっと読む)
水上又は水中航走体の監視装置

【課題】複数の種類の船種等の監視を迅速に行うことを可能にした航走体監視装置を提供する。
【解決手段】航走する単一の航走体から発生する複数の種類のシグネチャをそれぞれ検出する複数のセンサからなるセンサ部2と、該センサ部2からの複数の検出信号を複数の船種等に応じてそれぞれ処理する機能を有する信号処理部5と、航走する航走体の判定情報が設定され、前記信号処理部で処理された波形信号に基いて航走する航走体の船種等を判定する総合判定部6とを備えたものである。
(もっと読む)
可撓性の防水膜を有する潜水可能な装置
本発明は、液状媒体の中に完全に沈められうる潜水可能な装置であり、縦方向の主軸(A)を持つシールされた中空のボディ(12)と、装置(10)を水平におよび/または垂直に移動させるための少なくとも1つの駆動部材(14,36,52)であって、装置(10)が沈められる液状媒体と協働することが可能であり、
ボディ(12)の壁にある開口部(22,44,56)を通って中空のボディ(12)に関連して移動することができる、少なくとも1つの駆動部材(14,36,52)と、駆動部材(14,36,52)を作動させるための手段(18,40,64)であって、中空のボディ(12)内部に配置されている、作動手段と、を含む。
本発明は、装置(10)を移動させるために駆動部材(14,36,52)が開口部(22,44,56)を通って移動するとともに、変形することができる、および駆動部材(14,36,52)と協働することができる、可撓性の膜(24,50,58)によって開口部(22,44,56)がシールされていることを特徴とする。
(もっと読む)
水中航走体及び水中航走体の移動方法
【課題】機体の移動に必要なエネルギー消費量が著しく少なく、しかも、比較的単純で構成で機械的信頼性の高く、係留されることなく同じ観測水域に留まって長期間連続観測を行うのに適した水中航走体及び水中航走体の移動方法を提供する。
【解決手段】水中航走体1を船首方向を限定せずに、全周囲方向に対して移動可能に形成し、水中をグライディングにより移動するように構成する。更に、水中航走体1の浮力の調整を行なう浮力調整機構30(30A)と、水中航走体1の重心位置の移動を行なう重心移動機構20(20A)を搭載し、水中航走体1の浮力の増加により浮上を行い、水中航走体1の浮力の減少により沈降を行うと共に、水中航走体1の重心位置の移動により移動方向を変更するように構成する。
(もっと読む)
浮力調整装置、水中航走体及び浮力調整方法
【課題】全方位滑走可能な水中航走体等に搭載可能で、重心位置と浮心位置を平面的又は立体的に変化させることなく、浮力の増減を可能にして、浮力調整と重心移動を切り離して制御でき、水中航走体の滑走制御を簡便にすることができる浮力調整装置とそれを備えた水中航走体及び浮力調整方法を提供する。
【解決手段】浮力調整を行なう浮力調整装置1を、水密区画11から水中へ露出する浮力調整部分12a,13aを有する浮体12,13を移動して、前記浮力調整部分12a,13aが水密区画11外の水中へ露出する量を増減することにより、浮力調整を行なうと共に、重心位置と浮心位置の移動を伴わなずに浮力を変化させるように構成する。
(もっと読む)
重心移動装置、水中航走体及び重心移動方法
【課題】全方位滑走可能な水中航走体等に搭載可能で、部品点数が少なく、比較的軽量で、しかも、制御も比較的単純な重心移動装置とそれを備えた水中航走体及び重心移動方法を提供する。
【解決手段】重錘21の重心位置を一方向に往復移動可能に保持したスライド部20と、該スライド部20を旋回可能に支持して重心移動装置を構成する。更に、スライド部20を前記一方向を含む面と直交する軸32の周りに旋回可能に支持したり、重錘21の重心位置を移動させる第1のアクチュエータ23をスライド部20に搭載したりする。
(もっと読む)
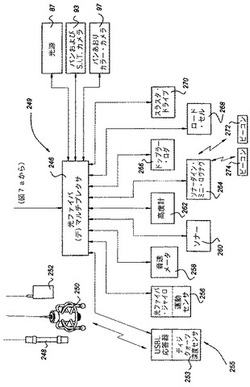
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 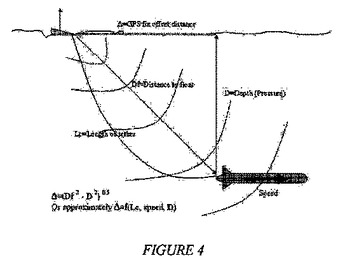 (もっと読む)
(もっと読む)
水中投下型センサシステム
【課題】使用後にセンサ等を海洋に放棄しても海洋環境汚染のおそれのない水中投下型センサシステムを提供する。
【解決手段】コンピュータ部1と水中に投下して落下中のセンサ5とを防水・防塩通信ケーブル3と水中通信ケーブル6とで結び、センサ5が計測する水深、水圧等の情報を計測し、計測終了後は、防水・防塩通信ケーブル3と水中通信ケーブル6とを切り離して、水中通信ケーブル6、センサ5等を海洋中に投棄する。投棄される水中通信ケーブル6、センサ5等は、水中で生分解して消滅する生分解性材料と水中で溶け出しても有害物質とならない金属とからなっており、海洋環境汚染を起こすことはない。
(もっと読む)
水中監視システム
【課題】水上又は水中を航行する監視対象物を、広範囲にわたり監視することができる水中監視システムを得る。
【解決手段】水中に複数設置され、水上又は水中を航行する航行船舶3の航行位置に関する情報を繰り返し取得し、取得した情報を送信する監視センサ1と、水中に1又は複数設置され、水中を航走する水中航走体2とを備え、水中航走体2は、監視センサ1から受信した航行位置に関する情報に基づき、水中航走体2と航行船舶3とが会合する会合位置を求め、当該会合位置へ航走するものである。
(もっと読む)
浮力調整装置、姿勢制御装置、無人潜水機、及び水中用衣服
【課題】物質の固相及び液相間の相変化に伴う体積変化を利用して浮力を調整する。
【解決手段】浮力調整装置10は、固相及び液相間の相変化に伴って体積が変化するパラフィンワックス1と、パラフィンワックス1の温度を調整する温度調整器15と、パラフィンワックス1を収容し、パラフィンワックス1の体積変化にともなって体積が変化する体積可変容器16とを有する。
(もっと読む)
41 - 50 / 73
[ Back to top ]