
国際特許分類[B63C11/48]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361) | 水中物の探索装置 (79)
国際特許分類[B63C11/48]の下位に属する分類
水中観察装置を有する浮揚構造物,例.窓を有するもの (5)
錨を用いるもの (1)
国際特許分類[B63C11/48]に分類される特許
51 - 60 / 73
水中点検システム
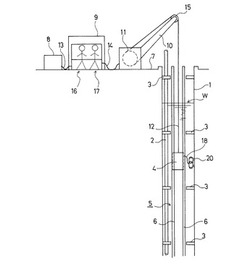
【課題】水中ロボットを収容したランチャを安全に、かつ、よりスムーズに昇降させる一方、水中ロボットをランチャに回収する時に、配管などに絡み付いたケーブルの回収不能や切断などのトラブルを回避する。
【解決手段】少なくとも目視用のカメラ21と推進装置25〜27を備えた水中点検ロボット20をランチャ4内に収容し、該ランチャ4をウインチ11から繰り出したワイヤーロープを用いて水中の被検査部50の近傍に降下させ、その後、前記ランチャ4から発進した前記水中点検ロボット20によって前記被検査部50の点検を行うようにした水中点検システムである。前記ランチャ4の昇降を、前記被検査部50の近傍に設けたランチャガイド5によって誘導する一方、前記水中点検ロボット20の前進に伴って繰り出されたケーブル18を、水中点検ロボット20内に設けたケーブルドラム24によって巻き取る。
(もっと読む)
海中探査機器及び海中探査機器の水中部保持方法

【課題】ケーブルを介して海中探査機器の水中部を保持する際に、波の上下動による摩擦を低減して長時間の保持が可能な海中探査機器及び海中探査機器の水中部保持方法を提供する。
【解決手段】水中部3の上面にブラケット8を設け、ブラケット8に各軸の周りに回転自在な1対のローラ7を取り付ける。ローラ7には引留め紐6が夫々1回巻き付けられ、引留め紐6はローラ7間に設けられたカッター10に接続することでループ状をなす。引留め紐6は浮上部から吊り下げられたケーブル4に結ばれている。
(もっと読む)
水中グライダー
【課題】推進器を持たず、静粛性および安全性と、高い運動性能とを両立することのできる水中グライダーを提供する。
【解決手段】機体の進行方向後部に設けられた尾翼3A,3Bと、機体中央部の重心近傍から進行方向左右に突出するとともに、該進行方向に対する仰角を個別に変更することのできる一対の主翼2A,2Bとを備え、機体内に設けられたバラストタンク13に注水または排水することで得られる沈降力または浮力を用いて水中を航走する水中グライダー。この水中グライダーは、左右の主翼2A,2Bの角度(仰角)の組み合わせにより、急旋回,急減速や、停止・後退、あるいは現位置での水平を保ったままでの浮上・潜入等、従来の固定翼式水中グライダーでは不可能であった高度な運動を、推進器を用いることなく行なうことができる。
(もっと読む)
有線式遠隔操縦型水中遊泳ビークル
【課題】水中遊泳型ビークルに接続された信号ケーブルの剛性によるそのビークルへ加わる外力を考慮しながらそのビークルの浮力を中性浮力に制御することが課題である。
【解決手段】原子炉圧力容器内の水中を各種スラスタ41,51a,51bによる推進装置で遊泳するビークル10と、ビークル10に連結された信号ケーブル32と、信号ケーブル32によってビークル10に垂直方向に加わる力を外力センサ33で検出する外力を計測する計測手段と、電磁バルブ64a,64bを開閉することにより、浮力体70a,70bに高圧ガスポンベ60から高圧ガスを注入したり浮力体70a,70b内のガスを排気管68から排気したりすることでビークル10の浮力を調整する浮力調整手段とを備えた有線式で遠隔操縦される水中遊泳ビークル。
(もっと読む)
水中航走体の航路制御方法
【課題】水中航走体の姿勢を制御する水平スラスタおよび垂直スラスタの動力の省エネルギー化を図ることができる水中航走体の航路制御方法を提供すること。
【解決手段】機体2の左右方向に延びる水平軸線に沿って配置された水平スラスタ7を備えるとともに、予め定められた経路の上を航走するた水中航走体1であって、潮流の影響を受けて、針路と機体方位との間に差が生じ、この針路と機体方位とのなす角度が所定角度以下の場合には、前記水平スラスタが作動しないように構成されている。
(もっと読む)
水中航走体
【課題】水中航走体の動力を効率よく使用することができる水中航走体を提供すること。
【解決手段】機体2を浮上または潜行させるのに使用される水平舵4と、前記機体2を左回頭または右回頭させるのに使用される垂直舵5とを備えた水中航走体1であって、前記水平舵4が、重心Gよりも前方側に位置する部分から、前記機体2の左右方向に延びる水平軸線に沿って設けられている。
(もっと読む)
位置姿勢制御装置及び位置姿勢制御方法
【課題】小回りの効く浮遊体の位置姿勢制御を可能にするとともに、一方向だけでなくその他の種々の方向についても同一姿勢を維持しながら移動する位置姿勢制御を可能にする。
【解決手段】それぞれ推力を発生させる6つの推力発生器14を備え、推力発生器14の何れもが、異なる方向に推力を発生させる設定とされている。各推力発生器14は、推力方向に延びる仮想直線30が隣の推力発生器14の推力方向に延びる仮想直線30と仮想軸40に垂直な2つの仮想平面上で交差するように位置決めされるとともに、前記一方の仮想平面上における仮想直線30の交点が仮想軸40上に重心位置のある正三角形の各頂点位置となり、かつ前記他方の仮想平面上における仮想直線30の交点が仮想軸40上に重心位置のある正三角形の各頂点位置となるように位置決めされている。
(もっと読む)
海中曳航体の着水・曳航方法、着水揚収装置及び着水揚収装置を備えた船舶
【課題】従来の海中曳航体の着水・揚収装置は、着脱装置本体等の重量が重たく、複雑となり、且つ、着脱装置本体等を吊下げる門型フレーム等も大掛かりなものとなるという問題があった。
【解決手段】門型フレームと、門型フレームの長手方向に移動可能に門型フレームに配置された着脱台移動用支持台と、門型フレームに取付けられ着脱台移動用支持台を移動させる着脱台移動装置と、着脱台移動用支持台に回転自在に取付けられた曳航体着脱装置と、曳航体着脱装置に回転自在に取付けられた曳航ケーブル用シーブとを備えた。これにより、曳航時に門型フレーム等に加わる張力を軽減でき、門型フレーム等を軽量化することができる。
(もっと読む)
潜水ビークル
船体軸を画定するとともに船体軸に沿って見た時に略環状を呈する外側船体を有する潜水ビークルであり、環状体の内部は、ビークルが液体に潜水する時に液体がダクトを満たすように、両端部で開口したダクトを画定する。ビークルはさらに、船体軸を中心にビークルを転回させるための手段を含む。浮力制御システムが設けられ、外側船体は船体軸に対して後傾している。ビークルを出動および使用する様々な方法が記載される。 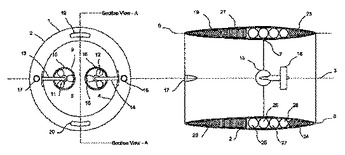 (もっと読む)
(もっと読む)
親子式自律型潜水機システム及び自律型潜水機の接続方法
【課題】 長航続距離、大潜航深度で航走できる親子式自律型無人潜水機を提供する。
【解決手段】 本発明による親子式自律型潜水機システムは、親結合部11を有し、水中を自律航行する親潜水機1と、子結合部21を有し、親潜水機1から分離して水中を自律航行する子潜水機2とを具備する。親潜水機1は、子潜水機2から送信される接続準備信号に応答して、所定の速度、方位、深度で航行する。子潜水機2は、接続準備信号を親潜水機1に送信し、所定の速度、方位、深度で航行する親潜水機1の親結合部11に対し、子結合部21を押し付けて、子結合部21と親結合部11とを着脱可能に接続する。
(もっと読む)
51 - 60 / 73
[ Back to top ]