
国際特許分類[B63H25/02]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 操舵のための入力装置 (110)
国際特許分類[B63H25/02]の下位に属する分類
国際特許分類[B63H25/02]に分類される特許
11 - 20 / 28
操船支援装置およびそれを備えた船舶
【課題】操作系の持ち替えの手間を省き、操船を容易にする。
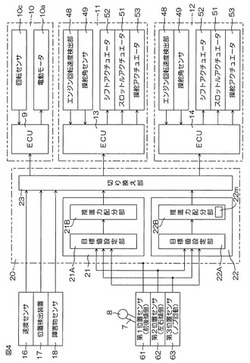
【解決手段】レバー7およびその頭部に設けられたノブ8は、ジョイスティック型の操作手段を構成している。航走制御装置20は、第1および第2目標値演算部21,22ならびに切換部23を備えている。第1目標値演算部21は通常航走モードに対応した目標値を演算し、第2目標値演算部22は平行移動モードに対応した目標値を演算する。目標値は、バウスラスタ10のプロペラ回転速度、ならびに船外機11,12のエンジン回転速度および操舵角を含む。切換部23は、通常航走モードのときは第1目標値演算部21が演算した目標値を選択し、平行移動モードのときは第2目標値演算部22が演算した目標値を選択する。
【効果】通常航走モードと平行移動モードとで操作系を共有できる。
(もっと読む)
水上オートバイのステアリングハンドル装置

【課題】操船者が最適なステアリングハンドル位置でハンドル操作できると共に、簡単な操作で迅速に位置変更できる水上オートバイのステアリングハンドル装置を提供する。
【解決手段】ステアリングシャフト30はハウジング33によって船体に回転自在に支持され、上部にハンドルバー取付け部を備えたスライド部40が取付けられている。ハンドルバー31は回転規制機構42によってステアリングシャフト30の中心軸を中心とした回転運動を規制され、軸方向への平行移動は許容される。ステアリングシャフト30には複数の溝36が設けられており、スライド部40に設けられたロック機構41は、ロック用バー51を任意の溝36に挿入することでスライド部40の軸方向への平行移動を規制する。ロック機構41を構成するリンク部及びカム溝の形状により、解除レバー60による解除操作以外でロック用バー51が溝36から抜けることがない。
(もっと読む)
操向装置
【課題】回転カバーと回転プレートの裕隔を解消し、裕隔の存在に起因して発生した摩耗及び騒音の発生を防止し、操向ハンドルの回転防止効果を極大化することができる操向装置を提供する。
【解決手段】円筒状の固定フレーム710と、前記固定フレームの内側に回転自在に設置される回転プレート720と、転動体730及び弾性体740を設置することができるように前記回転プレートの上面に設けられるマウント721と、前記マウント上に設置され、前記転動体を前記固定フレームの内面に密着するように弾性力を加える弾性体と、操向軸の操作時に前記転動体を加圧することができる可動片76aを有し、回転プレートの上部側をカバーする回転カバー76と、前記固定フレームと回転プレート及び回転カバーを貫通して設置される操向軸と、前記可動片の転動体との接触面上に前記可動片と転動体との間の裕隔を解消する弾性パッド80と、を備える。
(もっと読む)
あて舵操舵装置
【課題】予測されるあて舵で、針路が安定する操舵装置。
【解決手段】舵柄(または舵輪)を延伸した補助舵柄4を取り付け舵の作用力を軽減して、補助舵柄先端近くに回転支点を持つ自在伸縮棒5を取り付け、その他の端部の船体等接地支持点7を移動して、あて舵角度を調整し設定する。また補助舵柄先端近くからショックコード6を真横方向舷側側に引いて固定して、その張力とスクリュープロペラの総合作用で舵の遊動を抑制することにより安定した針路を獲得する操舵装置。
(もっと読む)
船舶
【課題】容易に所望の航行意図を実現し易く、快適な操作感を得易い船舶を提供する。
【解決手段】船舶10の所定位置に付与される推進力又は抵抗力の大きさ及び/又は方向を調整可能な操船機器20xを複数備えると共に、複数の操船機器20xを操作する操作機器30xと、複数の操船機器20xをそれぞれ駆動するアクチュエータと、操作機器30xの操作状態に基づいてアクチュエータの駆動量をそれぞれ制御する制御装置13とを備え、制御装置13は、船舶10の航行状態を検知する航行状態検知手段50と、操作機器30xの操作状態を検知する操作状態検知手段60と、航行状態及び操作状態に基づいて操船者の航行意図を推定する航行意図推定手段70と、航行意図に基づき、複数の操船機器20xから制御対象の操船機器20xを選定して、それを駆動するアクチュエータの駆動量を制御する操船機器制御手段80とを備えている。
(もっと読む)
直進位置判定器
【課題】
ハンドルとホイール関係の直進位置のズレを解消する。
【解決手段】直進位置判定器のマーク15に関して、当該マーク15の一種として中空の筒型を設定し、当該筒の中空の部分(孔)の方向を車体(船体、航空機体)の直進方向に合わせることによって、ハンドル4及び微調整(アジャスト)スペーサー22上の、両方か片方の中空の筒型のマーク15と、ダッシュボード19上の中空の筒型のマーク15を、直線の(真直ぐな)一本の棒21で、車体(船体、航空機体)の直進方向に並んでいるそれぞれの中空の筒型のマーク15をとおすことによって、容易に車体(船体、航空機体)本体19の直進位置におけるハンドル4のダッシュボード19上での位置関係を測定、保持することを可能とする、計2つ以上の中空の筒を設置する。
(もっと読む)
航走制御装置およびそれを備えた船舶
【課題】操作量に対する目標転舵角の関係を定める特性を予め準備することなく、操船特性を確実に改善できる航走制御装置を提供する。
【解決手段】ゲイン算出部69は、収集されたヨーレート、エンジン回転速度および転舵角のデータに基づいてゲインを算出し、エンジン回転速度およびゲインのデータは、学習データとして記憶部60に格納される。この学習データに基づいて、エンジン回転速度−ゲイン特性(N−K特性)が算出される。さらに、エンジン回転速度とゲインとの目標特性(目標N−K特性)と、前記算出されたN−K特性とに基づき、目標N−K特性を実現するためのエンジン回転速度−ステアリング操作角−目標転舵角特性(N−S−R特性)が求められる。このN−S−R特性に従って、ステアリング操作角に対する目標転舵角がエンジン回転速度に応じて設定される。
(もっと読む)
航走制御装置およびそれを備えた船舶
【課題】簡便な操作で操船特性を調整することができる航走制御装置を提供する。
【解決手段】目標特性入力部9は、エンジン回転速度およびステアリングホイールの操作量に対する船舶のヨーレートのゲインの目標特性を変更するために操作者によって操作される。目標特性入力部9は、目標特性ラインを表示する表示装置15と、タッチパネル75および十字ボタン76を含む入力装置14とを備えている。入力装置14の操作により、目標特性ラインの第1変曲点71および第2変曲点72の位置を変更することができる。特性変更ボタン84を操作することによって、目標特性ラインの変更が確定する。変更後の目標特性が達成されるように、エンジン回転速度とステアリングホイールの操作量と目標転舵角との関係を表すマップが更新される。
(もっと読む)
間欠仕様の操船装置
【課題】船艇を微速移動させるとともに容易に操作できる応答性のよい操船装置を提供する。
【解決手段】X軸、Y軸及びZ軸の3軸回りに回転自在であって、それぞれの軸回りの回転角を検出するジョイスティックレバー24及び、ジョイスティックレバー24から取得したX軸及びY軸回りの回転角に基づいて船艇の移動速度及び移動方向を決定し、ジョイスティックレバー24から取得したZ軸回りの回転角に基づいて船艇の回転速度及び回転方向を決定し、決定された船艇1の移動速度、移動方向、回転速度及び回転方向に基づいてエンジン2、3、クラッチ機構4、5及びバウスラスタ10の動作を制御する制御機構25を有する第二操作機構23を具備する操船装置であって、前記第二操作機構23の制御機構25は、決定された移動速度、移動方向、回転速度及び回転方向に応じたパルス信号をクラッチ機構4、5及びバウスラスタ10に送信することとした。
(もっと読む)
チルトステアリング機構
【課題】乗り物用のステアリング装置に関する。
【解決手段】長軸を有したステアリングシャフト38を備えたハウジング26を含んでいる。第1ベアリングはシャフトとハウジングとの間に提供されており、長軸周囲でステアリングシャフトを回転させる。第1ベアリング64側に薄い端部を有した第1楔形部材72と、第1楔形部材を第1ベアリング側に押圧し、シャフトと第1ベアリングとの間の遊び、並びに第1ベアリング内の遊びを減少させる手段も含んでいる。
(もっと読む)
11 - 20 / 28
[ Back to top ]