
国際特許分類[B63H25/24]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 舵による操舵 (226) | 操舵装置 (112) | 補助動力を有するもの;動力駆動されるもの,すなわち操舵機を用いるもの (107) | 入力装置の変動を操舵機に伝動するもの (64) | 電気的手段によるもの (50)
国際特許分類[B63H25/24]に分類される特許
1 - 10 / 50
船舶の操舵装置
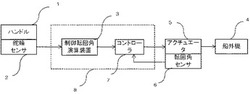
【課題】船舶において船外機の転回位置を検出する転回角センサの異常を検出した場合、転舵不能にならず操船することができる操舵装置を提供する。
【解決手段】操船者が操舵方向を指示するハンドル1と、ハンドル1の操作角を検出する舵輪センサ2と、船外機4を転回させるアクチュエータ5と、アクチュエータ5による船外機の転回角を検出する転回角センサ6と、操作角に基づきアクチュエータ5を転回駆動する制御転回角を算出し、制御転回角と転回角との差異に従ってアクチュエータ5を転回駆動する制御装置8とを有し、制御装置8は、転回角センサ6の異常を検出した場合、制御転回角に応じて予め決められた所定時間、所定電流に基づき転回駆動を継続するものである。
(もっと読む)
船舶の操舵装置

【課題】 この発明は、船舶において船外機の転回位置を検出する転回角センサの異常を検出した場合、転舵不能にならず操船することができる操舵装置を提供する。
【解決手段】 操船者が操舵方向を指示するハンドル1と、ハンドル1の操作角を検出する舵輪センサ2と、複数の船外機4のそれぞれに設けられ船外機4を転回させる複数のアクチュエータ5と、複数のアクチュエータ5による船外機4の転回角を検出する転回角センサ6を複数配し、操作角に基づき複数のアクチュエータ5を転回駆動する制御転回角を算出し、この制御転回角と転回角との差異に従って複数のアクチュエータ5を転回駆動する制御装置8とを有し、制御装置8は、複数のアクチュエータ5を同調動作させるものであって、転回角センサ6の異常を検出した場合、正常な転回角センサ情報に基づき転回駆動を継続するとともに、転回角センサ6が正常な場合に比較し、駆動する転回角を制限する。
(もっと読む)
小型船舶
【課題】多機掛け船外機型の小型船舶において、旋回時にアクセルレバー操作を省略可能とし、速度などの走行状態に応じて各船外機の出力を調整し、ハンドル操作だけで容易に効率よく旋回できる小型船舶を提供する。
【解決手段】 ハンドル7と、該ハンドル7の操舵角を検出する操舵角センサ9と、船尾に取付けられた複数の船舶推進機3a,3bと、各船舶推進器に連結された電動舵切り装置15と、前記各船舶推進機3a,3bの出力を制御する制御装置12とを備えた小型船舶において、前記制御装置12は、前記操舵角及び船の走行状態に応じて、前記各船舶推進機3a,3bの推力を調整し、船舶推進機全体での推力及びその方向を制御するものであり、前記ステアリングホイールの回転操作による操舵角に応じて、前記各船舶推進機3a,3bの推力の大きさが調整され推力差を設定する。
(もっと読む)
船舶用推進制御装置および船舶
【課題】転舵ユニットのエネルギー効率に貢献でき、かつ、乗員の違和感を低減できる船舶用推進制御装置および船舶を提供する。
【解決手段】
船体ECU20は、船外機11L,11Rおよび転舵ユニット12L,12Rを制御する。ジョスティックユニット10は、中立位置から傾倒可能なレバー7と、中立位置から回動可能なノブ8とを備えている。操船者は、ジョイスティックユニット10の操作により、船舶1の進行方向および回頭を指示することができる。船体ECU20は、ジョイスティックユニット10の出力信号に応じて、船外機11L,11Rの出力および転舵ユニット12L,12Rの転舵角を制御する。船体ECU20は、船外機11L,11Rからの推進力を停止するとき、転舵ユニット12L,12Rの転舵角を保持するように構成されている。
(もっと読む)
小型船舶用パワーステアリング装置
【課題】舵の効きを良くし、レスポンスのよい操舵性能を得るため、油圧ポンプ装置のポンプ効率を向上させるパワーステアリング装置を提供する。
【解決手段】共通ベース28の上に、電動アシスト装置26及び斜板式アキシャルピストンポンプであるヘルムポンプ27を並列配置し、共通ベース28の下方にて電動アシスト装置26とヘルムポンプ27を伝動機構34で接続して一体化した操舵油圧発生ユニット6とし、電動アシスト装置26をインパネへ支持させる。伝動機構34は電動アシスト装置26の出力軸33に設けた駆動ギヤ50とヘルムポンプ27のポンプ軸46に設けた従動ギヤ51の噛み合いによりギヤ駆動で、電動アシスト装置26の回転出力をヘルムポンプ27のポンプ軸へ増速伝達する。
(もっと読む)
船舶用推進システム
【課題】転舵装置により舵部が回動される場合において、船の旋回性が悪化してしまうことを抑制しながらハンドルのロックを行うことが可能な船舶用推進システムを提供する。
【解決手段】所定の角度範囲内で回動可能な船外機300と、ハンドルの回動に応じて船外機300を回動させる舵取装置200と、ハンドルの回動角に対応して目標操舵角を設定するとともに、船外機300の回動角度が目標操舵角となるように舵取装置200を駆動する船体側ECU109と、船外機300の回動角度が所定の角度範囲の限界角度以上になったことを検知する実舵角センサ203と、実舵角センサ203により船外機300の回動角度が限界角度以上になったことが検知された場合に、ハンドルの回動をロックするロック機構108とを備えている。
(もっと読む)
制御装置、及び、制御装置を備えたボート駆動装置
本発明は、特にはボート駆動部のための、制御装置に関する。当該制御装置は、姿勢駆動部と、減速ギヤ装置(8、11、15/17)と、ある制御角度だけ移動可能な姿勢要素(2)と、を備えている。本発明によれば、減速ギヤ装置が、駆動側歯車(10)を有する多段変速機構(8、11、15/17)を備えており、姿勢駆動部は歯車(10)を同時に、且つ、互いを僅かに回転駆動する2つのサーボモータ(6)を有している。  (もっと読む)
(もっと読む)
駆動制御システム
本発明は、自動車、ボート、航空機など、またはビデオゲームのコンソール、シミュレーション装置などの運転シミュレータの車両駆動制御システム(1)に関し、ステアリングホイール、舵などの方向制御デバイス(2)を備え、指向手段(21′、22′、21″、22″)を備え、前記システム(1)は、前記方向制御デバイス(2)の位置を検出するための手段(6)と、フレームを有し、前記方向制御デバイス(2)の動作に対する抵抗を調節するのに適している受動的アクチュエータおよび調節手段(8′、8″、8a、8a′、8b、8b′)を備える前記方向制御デバイス(2)と機械的に連結する調節モジュール(7、7′、7″)と、前記指向手段(21′、22′、21″、22″)の位置を検出するための1つまたは複数のセンサー(27)と、前記検出手段(6)によって検出された前記方向制御デバイス(2)の位置に基づいて、前記受動的アクチュエータまたは調節手段(8′8″、8a、8a′、8b、8b′)による前記方向制御デバイス(2)の動作に対する抵抗を適切に較正し、前記指向手段および前記センサー(27)によって前記車両またはシミュレータの方向を制御する、少なくとも1つの中央制御装置(23)とを含むことを特徴とする。  (もっと読む)
(もっと読む)
船舶用推進システム
【課題】ハンドルの回動方向を指定して抵抗を付与することが困難であるロック機構を用いてハンドルをロックする場合にも、ハンドルがロックされた後にハンドルを容易に戻すことが可能な船舶用推進システムを提供する。
【解決手段】船外機の回動角度が所定の角度範囲の限界角度になったことを検知する実舵角センサ203と、実舵角センサ203の検知情報に基づいて、ハンドルの舵を切る方向および舵を戻す方向の両方の回動に抵抗を付与するロック機構108と、船外機の回動角度が所定の角度範囲の限界角度になった場合に、船外機の回動角度が舵を戻す方向にハンドルが回動している状態、または、舵を戻す方向にハンドルが回動しようとしている状態を検知するトルクセンサ107と、トルクセンサ107の検知情報に基づいて、ロック機構108によるハンドルに対するロックを解除するロック解除手段とを備えている。
(もっと読む)
推進機付船舶のパワーステアリング装置
【課題】 推進機付船舶のパワーステアリング装置において、操舵アシスト装置のための配置レイアウト性と防水環境性を向上すること。
【解決手段】 船体2の船首側に設けられる操舵ハンドル10と、船体2の船尾側に設けられる推進機20と、操舵ハンドル10に加えられる操舵力を推進機20に伝える操舵力伝達経路に介装される操舵アシスト装置40とを有してなる推進機付船舶1のパワーステアリング装置3において、操舵アシスト装置40が推進力伝達経路を構成する操舵ケーブル30の中間部に配置されるもの。
(もっと読む)
1 - 10 / 50
[ Back to top ]