
国際特許分類[B65G49/06]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 他の分類に属せず,特殊な目的に適用されることを特徴とする移送装置 (2,620) | もろい,または損傷性材料または物品用のもの (2,337) | もろい薄板状材料,例.ガラス板,用のもの (1,271)
国際特許分類[B65G49/06]に分類される特許
31 - 40 / 1,271
複合搬送装置及びそれを用いた方法
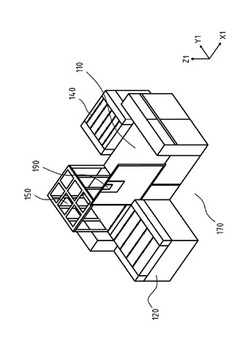
【課題】複合搬送装置及びそれを用いた搬送方法を提供する。
【解決手段】複合搬送装置は、基台と、少なくとも一つの積み込み機構と、降ろし機構と、を備えている。基台は当該基台上に少なくとも一つのカセットを備えている。積み込み機構は基台の一側に隣接し、カセットに複数の目的物を積み込むために用いられる。他方、降ろし機構は、基台の他側に隣接し、カセットから複数の目的物を降ろすために用いられる。基台は少なくとも二つの領域を備え、各々の領域は積み込み機構又は降ろし機構に隣接し、カセットは、目的物の積み込み動作及び降ろし動作を実行するために、二つの領域の間を移動する。
(もっと読む)
基板搬送装置

【課題】基板の搬送中に振動が発生した場合であっても基板を確実に保持することが可能。
【解決手段】搬送対象の基板Wを載置して、基板Wを所定の搬送方向Dに沿って搬送する搬送ステージ12,13,14を有するFPD検査装置1であって、搬送ステージ12,13,14上で搬送方向Dに沿って移動可能であり、基板Wを保持する保持部23と、保持部23の近傍に設けられ、保持部23で保持された基板Wの主面を押圧する押圧部25と、を備えた。
(もっと読む)
搬送装置及びプラズマ処理システム
【課題】撓みによって生じる搬送アーム先端の下方への傾斜を低減することができる搬送装置及びプラズマ処理システムを提供する。
【解決手段】筐体内へ被搬送物を搬送する搬送装置である。搬送装置は、搬送アーム52、アーム軸53、複数の電磁石50及び制御部40を備えている。搬送アームは、被搬送物を載置するピック部52bを先端に有し、水平方向に伸縮する。アーム軸53は、搬送アーム52を支持する。複数の電磁石50は、筐体内部に磁場を発生させることにより搬送アーム52に上昇方向の力を作用させる。制御部40は、搬送アーム52が水平方向に伸縮する際にアーム軸53から搬送アーム52先端までの長さが長くなるほど搬送アーム52に作用させる上昇方向の力が大きくなるように複数の電磁石50を制御する。
(もっと読む)
ロボット、ロボットの設置方法および製造装置
【課題】チャンバ内への設置を容易に行うこと。
【解決手段】実施形態に係るロボットは、胴体部と、アームユニットとを備える。胴体部は、真空チャンバの上方から真空チャンバ内へ搬入されるとともに、真空チャンバへ固定される。また、アームユニットは、真空チャンバの上方から真空チャンバ内へ搬入されるとともに、真空チャンバ内へ固定された胴体部に対して連結される。
(もっと読む)
液剤塗布装置及び液剤塗布方法
【課題】サイズの小型化を図り、面積生産性を向上させることができる液剤塗布装置及び液剤塗布方法を提供することを目的とする。
【解決手段】液剤Qが塗布される前の基板4を収容した基板供給用のマガジン5が設置される基板供給部R1、基板供給部R1に設置された基板供給用のマガジン5から取り出されて作業位置に移送された基板4に液剤Qを塗布する塗布ヘッド14、塗布ヘッド14により液剤Qが塗布された基板4を収容する基板回収用のマガジン5が設置された基板回収部R2を備えた液剤塗布装置1において、基板供給部R1と基板回収部R2が上下方向に並んで位置する。
(もっと読む)
搬送装置
【課題】太陽電池モジュールの湾曲を防止した搬送装置を得ること。
【解決手段】太陽電池モジュール24の出力特性を測定する電流電圧特性模擬装置本体11の上で受光面を下向きとして太陽電池モジュール24を搬送する搬送装置50であって、電流電圧特性模擬装置本体11の上方に配置され、太陽電池モジュール24の対向する2辺を支持して太陽電池モジュール24を搬送する一対の搬送ベルト23と、一対の搬送ベルト23によって搬送される太陽電池モジュール24の受光面と反対側の面を吸着して、太陽電池モジュール24の中央部を引き上げる吸着ユニット35と、吸着ユニット35を、一対の搬送ベルト23による太陽電池モジュール24の搬送に同期させて移動させる搬送ベルト33とを備える。
(もっと読む)
シート搬送装置
【課題】エアの圧力を積極的に利用することなく、連続シートSの搬送中に、連続シートSの中間部の非接触状態を維持しながら、連続シートSを一定の姿勢に安定的に保つこと。
【解決手段】各第1搬送ローラユニット7における第1下搬送ローラ9及び第1上搬送ローラ11の軸心9c,11c、並びに各第2搬送ローラユニット13における第2下搬送ローラ15及び第2上搬送ローラ17の軸心15c,17cは、搬送幅方向内側が搬送幅方向外側よりも高くなるように水平面に対して傾斜可能に構成されている。
(もっと読む)
搬送ロボット、筐体、半導体製造装置およびソータ装置
【課題】筐体の大型化および清浄度の低下を防止可能な搬送ロボット、筐体、半導体製造装置およびソータ装置を提供すること。
【解決手段】搬送ロボットの胴体は、上端が第1アームの最下部より下方となるよう位置するとともに、搬送ロボットが垂直になるよう固定させる固定部が設けられた垂直面を有する板状のプレートと、垂直面に設けられた昇降機構と、第1アームを回転自在に支持し、昇降機構によって垂直面を昇降可能な移動ユニットとを備える。また、第1アームの最下部は、胴体の上端と接触しない程度に胴体へ近づけられている。
(もっと読む)
基板処理装置
【課題】基板搬送を効率良く行うことで、基板処理のスループットを向上する技術を提供する。
【解決手段】基板9を処理する基板処理装置100である。基板処理装置100は、外部から基板を受け入れる基板受入部1と、基板9に処理液を塗布する塗布部2と、処理液が塗布された基板9を乾燥させる乾燥部3と、基板9を外部に払い出す基板払出部4とを備えている。また、基板処理装置100は、基板受入部1にある複数の基板9を同時に塗布部2に搬送する搬送機構5と、塗布部2において処理液が塗布された複数の基板9を同時に乾燥部3へ搬送する搬送機構6と、乾燥部3にて乾燥された複数の基板9を同時に基板払出部4へ搬送する搬送機構7とを備えている。
(もっと読む)
物品の搬送装置及び搬送方法
【課題】第一回転円盤と第二回転円盤との同期機構や吸引切換え機構が不要で構成簡素であり、各回転円盤を連続回転させても物品の移替えを安定確実に行うことができ、搬送能力を大幅に向上させ得る物品の搬送装置と搬送方法を提供する。
【解決手段】物品Wを外周部に吸着保持して回転する第一回転円盤1及び第二回転円盤2を備え、各外周部の一部同士を近接させた物品受渡し部Tで第一回転円盤1の外周部に吸着保持された物品Wを第二回転円盤2の外周部へ移し替えて搬送する物品の搬送装置10において、第一回転円盤1及び第二回転円盤2の各外周部に全周に亘って吸引隙間11、21を形成し、各吸引隙間11、21を通して外気を常時吸引して物品Wを吸着保持可能に構成し、第二回転円盤2の吸着力を第一回転円盤1の吸着力よりも大きくした。
(もっと読む)
31 - 40 / 1,271
[ Back to top ]