
国際特許分類[B65G49/07]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 他の分類に属せず,特殊な目的に適用されることを特徴とする移送装置 (2,620) | もろい,または損傷性材料または物品用のもの (2,337) | 半導体ウェハーのためのもの (1,051)
国際特許分類[B65G49/07]に分類される特許
81 - 90 / 1,051
基板処理装置
【課題】互いに仕切られ、積層された基板搬送領域にて気流の滞留を防ぐと共に各搬送領域のメンテナンス作業を容易に行うことができる基板処理装置を提供すること。
【解決手段】
積層された第1の基板搬送領域及び第2の基板搬送領域を仕切る仕切り位置に設けられ、内部に気体拡散室を備える仕切り板と、基板搬送領域の幅方向中央部から周縁部に寄った位置にて、前記仕切り板に前記気体拡散室に連通する清浄気体供給口に気体を供給する気体供給路と、前記気体供給路に設けられ、前記清浄気体供給口に供給する気体を清浄化するためのフィルタと、仕切り板の下面に形成され、気体拡散室にて拡散した気体を基板搬送領域に吐出するための多数の吐出口と、を備え、仕切り板は、メンテナンス時に第2の基板搬送領域から第1の基板搬送領域が見通せる開放状態とするために前記仕切り位置から退避できるように装置を構成する。
(もっと読む)
真空処理装置の運転方法

【課題】作業効率が良く精度の高いティーチングを行って処理の効率を向上できる真空処理装置の調整方法を提供する。
【解決手段】その上面に所定の波長の光の反射の特性を局所的に異ならせた特定の箇所を有した調整用の試料を前記試料台の上面の特定の位置と前記特定の箇所とを合わせて載置した後、前記真空容器の内部を封止した状態で前記ロボットを移動させて前記ロボットのアーム上の所定の位置に配置され前記反射した所定の波長の光の通過部を前記調整用の試料の前記特定の箇所の上方に移動させ、その移動の際に前記調整用の試料から向かって前記通過部を通過した光を前記板部材の外側で検知し、検出した前記光の量に応じて前記試料の特定の箇所と前記ロボットの所定の位置との位置合わせを行う。
(もっと読む)
カセット収容装置
【課題】作業効率に優れ、カセットを収容する空間の省スペース化を実現すること。
【解決手段】本実施の形態に係るカセット収容装置は、カセット台103を、横2列上下2段に4個配設し、上下にスライド移動可能な内部ドア107を各カセット台103に対応するように4個配設し、上段のカセット台103に対応する内部ドア107は上方向にスライドした際に開位置、下方向にスライドした際に閉位置に位置づけられるように構成し、下段のカセット台103に対応する内部ドア107は上方向にスライドした際に閉位置、下方向にスライドした際に開位置に位置づけられる構成とした。
(もっと読む)
基板吸着装置
【課題】反ったりうねったりしている基板でも、吸着して平らな状態で固定することができる基板吸着装置を提供する。
【解決手段】基板吸着装置10は、(a)外部に露出する支持面12sを有し、内部に真空空間11が形成され、真空空間11と外部との間を連通しかつ支持面12sに対して垂直方向に延在する連通孔14pが形成された本体12と、(b)連通孔14pに沿って摺動自在かつ気密に支持された支持部24と、支持部24に接続され本体12の支持面12sから後退可能に突出する吸着パッド22とを有し、支持部24及び吸着パッド22に外部と本体12の真空空間11とを連通する吸引孔21が形成された吸着部20とを備える。基板2を吸着部20の吸着パッド22で吸着しながら本体12側に引き寄せて本体12の支持面12sに当接させることができる。
(もっと読む)
基板処理装置
【課題】枚葉処理またはバッチ処理の種類に関係なく、基板に施す一連の処理を新規な基板搬送方式により効率的かつ高スループットで行うこと。
【解決手段】この基板処理装置は、横長のプロセスステーション10をシステム中心部に配置し、その長手方向(X方向)の両端部にローダ12およびアンローダ14を連結している。プロセスステーション10は、ローダ12からアンローダ14に向かってシステム長手方向(X方向)にまっすぐ延びる搬送ライン28を有し、この搬送ライン28を挟んでその左右両側に後述する多数および多種類の処理ユニット44〜54を配置している。搬送ライン28上には、複数(図示の例では4つ)の枚葉搬送機構30,32,34,36と複数(3つ)のシャトル搬送部38,40,42とが交互に並んで一列に配置されている。
(もっと読む)
基板搬送装置
【課題】2段のピンセットによる搬入出動作を同じタイミングで行い、基板搬送に係る処理時間を短縮する。
【解決手段】基台上に相対向して立設された一対の第一及び第二の昇降軸7,8と、前記第一の昇降軸に沿って昇降自在に設けられると共に、第一のピンセット15をステージに対し進退移動させる第一の進退移動手段13と、前記第一の進退移動手段を前記第一の昇降軸に沿って昇降移動させる第一の昇降手段11と、前記第二の昇降軸に沿って昇降自在に設けられると共に、第二のピンセット16をステージに対し進退移動させる第二の進退移動手段14と、前記第二の進退移動手段を前記第二の昇降軸に沿って昇降移動させる第二の昇降手段12と、前記第一及び第二の進退移動手段の駆動制御、及び前記第一及び第二の昇降手段の駆動制御を行う制御手段19とを備える。
(もっと読む)
ヤトイ治具
【課題】成膜面を下にして上下を逆にして載置したウエハ上の堆積膜にクラック、バリ、剥がれの発生を防止する。
【解決手段】蒸着設備において、下から受けてウエハ2を支えて搭載するウエハ搭載用のヤトイ治具3において、ヤトイ治具3の内周側の先端部に庇状の段差部3aが平面視リング状に設けられている。リング状のヤトイ治具3の段差部3b上にはウエハ2が搭載され、さらに外周側のヤトイ治具3の段差部3c上には、その下面がウエハ2の上面にと当接してウエハ2を自重で固定するための蓋4が搭載されている。段差部3c上に搭載された蓋4の下面は、段差部3b上に搭載されたウエハ2の上面を多少押圧する段差部3b、3cの段差高さ関係を有している。
(もっと読む)
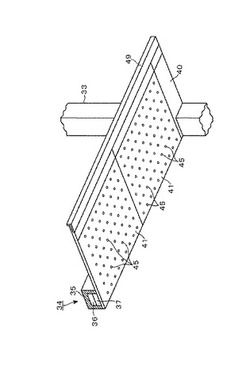
基板を格納するための基板容器
【課題】半導体ウェハ又は基板を支持するための新規な装置を提供する。
【解決手段】基板容器は、基板を包囲するハウジングを備え、ハウジングはハウジングの包囲体の中にアクセスするための容器ドアを有する。ハウジングの中に配置された支持構造体は前記包囲体の中に延びる複数のタインを有する。タインは外縁を有する。複数のタインは水平方向に配置される。基板の張り出し部分はタインの外縁を越えて延び、基板に係合するアクセス領域を形成する。タインは基板を支持するための支持パッドを含む。タインのうちの1つの支持パッドのうちの1つは前記アクセス領域のうちの一方の側に配置され、タインのうちの1つの支持パッドのうちの他の1つは前記アクセス領域のうちの他方の側に配置される。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
ロードロック装置および真空処理装置
【課題】被処理体を安定して保持することが可能なロードロック装置と、このロードロック装置が付設された真空処理装置を提供する。
【解決手段】真空槽の内外に真空槽内の減圧状態を維持したまま基板を搬入出可能なロードロック装置であって、基板を載置する凹部を有するトレイを支持することが可能な支持台と、基板を保持する蓋部と、を備え、真空槽には、基板を搬入出する開口が設けられ、真空槽の開口は、真空槽外部から蓋部によって閉塞され、真空槽内部より支持台によって閉塞することで、真空槽の壁、蓋部、および支持台によって真空槽の外部および内部から遮蔽された閉塞空間が形成され、閉塞空間を大気圧とする通気手段と、閉塞空間を減圧する排気手段と、を、さらに備え、蓋部は、閉塞空間を形成しているときに基板を載置するトレイの凹部より外側に位置する複数の保護部材を有するロードロック装置が提供される。
(もっと読む)
81 - 90 / 1,051
[ Back to top ]