
国際特許分類[E04H6/24]の内容
固定構造物 (153,614) | 建築物 (56,189) | 特定目的の建築物または類似の構築物;水泳または水遊び用の水槽またはプール;マスト;囲い;テントまたは天蓋一般 (8,696) | 自動車,車両,航空機,船舶,または類似の乗り物を格納するための建築物,例.ガレージ (1,641) | 多くの乗り物のためのガレージ (774) | 乗り物を移動または昇降するための機械的手段を有するもの (726) | 垂直方向だけまたは垂直と水平方向に独立して運ぶ手段を有するもの (535) | 水平に運ぶための小輪トロッコの使用に特徴のあるもの (19)
国際特許分類[E04H6/24]に分類される特許
1 - 10 / 19
車両搬送装置
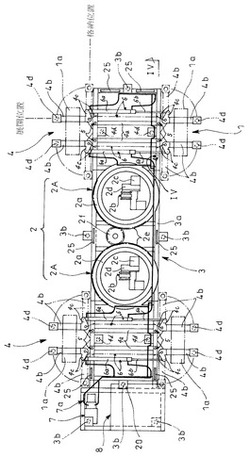
【課題】車両の左右両側に充分な空きスペースがなくても、簡単な構成で車両を確実に搬送し得る車両搬送装置を提供する。
【解決手段】走行駆動装置2により全方向に自走可能で且つ車両1下部に進入可能な台車本体3と、該台車本体3の台車フレーム3aに連結部材5を介して取り付けられるリフターフレーム4aに、前記台車フレーム3aの側面に沿う格納位置と前記車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバー4bを、前記車両1の車輪1aに対応させて枢着することによって形成したリフター4とを備える。
(もっと読む)
車両移動装置の運転方法

【課題】力制御を適用することにより、車両のホイールベースを推定しつつ、該車両の前輪又は後輪のいずれか一方の車輪をリーダ台車とフォロワ台車とによりリフトアップして精度良く移動させることができる車両移動装置の運転方法を提供する。
【解決手段】走行駆動装置により全方向に自走可能な台車本体2と、該台車本体2に連結機構を介して取り付けられ且つ車両4の一つの車輪4aをリフトアップするリフター5とを有し、与えられた目標軌道に沿って移動可能なリーダ台車Aと、走行駆動装置により全方向に自走可能な台車本体2と、該台車本体2に連結機構を介して取り付けられ且つ前記車両4の前記リーダ台車Aにてリフトアップされる車輪以外の一つの車輪4aをリフトアップするリフター5とを有し、前記リーダ台車Aの動きを推定しつつ追従することにより、該リーダ台車Aと協調して車両を移動させるフォロワ台車Bとを備えた車両移動装置。
(もっと読む)
物体移動装置
【課題】フォロワ台車に地面に対する走行車輪の滑り等による運動誤差が生じた場合でも、物体を目標位置まで確実に搬送し得る物体移動装置を提供する。
【解決手段】リーダ台車Aとフォロワ台車Bを物体の重心における制御点回りにインピーダンス制御し、リーダ台車Aに与えられる目標軌道に基づくフォロワ台車Bの目標軌道を該フォロワ台車Bにも与え、フォロワ台車Bに搭載された軌道センサを用いて算出したフォロワ台車Bの位置・姿勢と実空間における位置・姿勢との運動誤差を推定し、該推定される運動誤差を修正しながらフォロワ台車Bを移動させるよう構成する。
(もっと読む)
物体移動装置
【課題】構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得る物体移動装置を提供する。
【解決手段】一対のリフトバー27を車両4の接地ポイントとしての車輪4aの両側から互いに近接させる際、一方のリフトバー27が他方のリフトバー27より先に車輪4aに接触した場合、該一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向へ台車本体2を移動させつつ前記一対のリフトバー27を互いに近接させ、前記他方のリフトバー27が車輪4aに接触した時点で前記台車本体2を停止させるよう構成してある。
(もっと読む)
車両移動装置の運転方法
【課題】車両の前輪又は後輪のいずれか一方の車輪をリーダ台車とフォロワ台車とによってリフトアップして移動させることができ、効率向上を図り得る車両移動装置の運転方法を提供する。
【解決手段】車両4の車輪4aのうち右側の前輪をリーダ台車Aでリフトアップすると共に、車両4の車輪4aのうち左側の前輪をフォロワ台車Bによってリフトアップし、該リーダ台車Aとフォロワ台車Bの制御点CPを車両4のリフトアップされる二個の車輪4aの中点に設定し、前記車両4を含めたシステム全体を、前記中点に設定され且つ能動的に全方向へ速度を発生可能な仮想キャスタと、前記車両4の接地している側の対向する二個の車輪4aとによって構成される三輪車モデルに見立てて位置制御する。
(もっと読む)
機械式駐車装置
【課題】特別な装置を要することなく第1の列の格納室とその外側の格納室との間でトレーの受け渡しを行なうことのできる機械式駐車装置の提供。
【解決手段】搬送路1に隣接する内側の列を第1の列として複数列に亘って配列され、それぞれにトレー2が配置された複数の格納室3を備えたものにおいて、搬送台車4と各格納室との間でトレーを受け渡しするトレー移載機構として、搬送台車上に搭載され、トレーに具備された被係合部に係合可能な係合部材61およびこの係合部材を駆動する駆動手段62を備えたトレー送り装置6と、トレーにそれぞれ設けられ、第1の列の格納室およびその外側の格納室にあって互いに隣接するトレーを連結する連結手段7と、搬送台車に設けられ、トレー送り装置によるトレーの第1の列の格納室から搬送台車への払い出し動作完了前に、連結手段によるトレー同士の連結を解放する開放手段8とを備えたものである。
(もっと読む)
車両移動方法
【課題】任意の位置、姿勢に停車した車両を安定して移動できるようにする。
【解決手段】制御装置32は車両検出センサ31で検出したデータに基づき車両4の位置、姿勢、大きさを示す車両データを計測し、リーダ受取軌道とフォロワ受取軌道を演算して送信する。リーダ台車A及びフォロワ台車Bはリーダ受取軌道及びフォロワ受取軌道に沿って夫々車両4の別の側部に誘導される。台車A,Bはタイヤを検出する為の位置検出センサ33’,34’で検出したデータに基づいて位置が微調整された後、リフトバー27をタイヤ下部に挿入するための移動、及びリフトバー27による車両4のリフトアップを行う。台車A,Bは目標軌道に沿って目標位置105に誘導された後、車両4を目標位置105に設置し、リフトバー27をタイヤの下部から引き抜く移動を行った後、台車A,Bはリーダ戻り軌道及びフォロワ戻り軌道に沿って出発位置に戻る。
(もっと読む)
物体移動装置
【課題】無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両等の物体を落としたり、傷つけたりする心配がなく、更に、大きさや接地ポイント数の異なる車両等の物体にも装置の種類を増やすことなく対応し得、車両等の物体を確実に且つより安定して移動させることができ、移動経路や保管スペースの削減をも図り得る物体移動装置を提供する。
【解決手段】車両4の一つの車輪4aをリフトアップし、与えられた目標軌道に沿って移動可能なリーダ台車Aと、
リーダ台車Aにてリフトアップされる車輪4a以外の一つの車輪4aをリフトアップする複数台のフォロワ台車Bとを備え、
各フォロワ台車Bがリーダ台車A及び自分以外をまとめたものを一台の仮想リーダ台車と想定し、その動きを推定しつつ追従することにより、協調して車両4を移動させるよう構成する。
(もっと読む)
物体移動装置
【課題】無線通信のみによる台車相互間でのリアルタイムの情報交換を行うようにした協働搬送とは異なり、車両等の物体を落としたり、傷つけたりする心配がなく、更に、複雑な協調制御を不要とし、高性能なCPUや力センサ等を搭載する必要をなくしてコストダウンを図りつつ、車両等の物体を確実に且つより安定して移動させ得る物体移動装置を提供する。
【解決手段】走行駆動装置1により全方向に自走可能な台車本体2と、台車本体2に連結機構3を介して取り付けられ且つ車両4をリフトアップするリフター5とを有し、与えられた目標軌道に沿って移動可能なリーダ台車Aと、
該リーダ台車Aと共に車両4をリフトアップした際に走行状態切換手段50にて台車本体2を追従走行状態に切り換えることにより、リーダ台車Aの動きに追従するフォロワ台車Bと
を備える。
(もっと読む)
車両移動装置
【課題】大型化することなく、1台の台車装置で車両を浮上支持して移動することを可能とし、制御系を簡素化することができる車両移動装置を提供すること。
【解決手段】 車両の車輪を浮上支持して移動する車両移動装置1で、操舵可能な走行駆動機構を備える台車装置10と、この台車装置10に伸縮機構35で退避可能に搭載され全輪を浮上支持する浮上支持手段30と、制御装置とで構成する。
そして、台車装置の操舵および走行駆動と浮上支持手段の退避および浮上とを制御手段で制御することで、装置を大型化することなく、1台の台車装置で車両を浮上支持して移動することができ、制御系を簡素化するようにしている。
(もっと読む)
1 - 10 / 19
[ Back to top ]