
国際特許分類[F16H21/54]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 主としてリンクまたはレバーのみからなり,滑動部をもつか,またはもたない伝動装置 (548) | 3次元的に運動するもの (86) | 振動または往復運動の伝達または相互変換をするもの (12)
国際特許分類[F16H21/54]に分類される特許
1 - 10 / 12
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
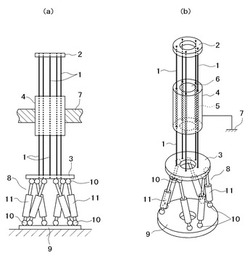
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
操作機構

【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる操作機構を提供する。
【解決手段】 操作機構1は、3組以上のリンク機構11Aを介して、固定部材4に対し入力部材15Aを姿勢変更可能に連結した入力側リンク作動装置2Aと、3組以上のリンク機構11Bを介して、固定部材4に対し出力部材15Bを姿勢変更可能に連結した出力側リンク作動装置2Bとを備える。リンク機構11A,11Bは、固定側の端部リンク部材1aと、入力側または出力側の端部リンク部材1cと、これら両端部リンク部材1a,1cを連結した中央リンク部材1bとでなる。入力側リンク機構11Aの固定側の端部リンク部材11aの回転を出力側リンク機構11Bの固定側リンク部材11aに伝達する回転伝達機構5を2組以上設ける。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
パラレルメカニズム及びパラレルメカニズムを用いた位置決め装置
【課題】部品等を高精度に、高い自由度で移動可能であり、また小型、軽量なパラレルメカニズム及びパラレルメカニズムを用いた位置決め装置を提供すること。
【解決手段】位置決め装置1は、パラレルメカニズム2と、パラレルメカニズム2を駆動するリニアアクチュエータ61,62,63,64と、リニアアクチュエータ61,62,63,64が載置されるベース3と、リニアアクチュエータ61,62,63,64を制御する制御部5とから構成されている。パラレルメカニズム2は、アーム10,20,30,40と、可動先端部60とから構成され、アーム10,20,30,40には、側面視円弧型のばね関節14〜16,24〜26,34〜36,44〜46が設けられている。従って、パラレルメカニズム2内の複数のばね関節の形状により変形方向を制御し、これら複数のばね関節の復元力を拮抗させることで動作精度と剛性を高めることができる。
(もっと読む)
ロボットアーム
【課題】均一で安定した予圧を付与することが可能で、軸受の長寿命化が可能なロボットアームを提供する。
【解決手段】リンク機構を用いたロボットアーム10であって、スリーブ41とハウジング42との間に転がり軸受43が設けられた転がり軸受ユニット40が関節部15に使用される。
(もっと読む)
平行アームを持つロボットあるいは触覚インターフェース構造体
本発明は6自由度を有すると共にベース(2)と二つの平行なアーム(B,B')とリストジョイント(P)とを有するロボットまたは触覚インターフェース構造体に関し、アーム(B,B')はベース(2)とリストジョイント(P)との間に回動可能に設けられ、アーム(B,B')は、ショルダージョイント(3,3')とアーム(4,4')とリストジョイント(P)を支持する前腕(6,6')とを具備し、リストジョイント(P)は、それに対してハンドルホルダー(18)が第1の回転軸線(X)を中心として連結される連結セグメント(24)と、第2の回転軸線(Z)を中心としてハンドルホルダー(18)に回動可能に連結されたハンドル(16)であって、第1の軸線(X)、第2の軸線(Z)および第3の軸線(Y)を中心として回動可能なハンドル(16)とを備え、連結セグメント(24)の回転に対する少なくとも第1の回転軸線(X)を中心とするリストジョイント(16)の回転を低速化する手段が連結セグメント(24)に対して、さらにヒンジ結合されている。  (もっと読む)
(もっと読む)
揺動装置
【課題】モータの質量に関わらず、応答性の高い揺動装置を提供する。
【解決手段】揺動装置10は、ベース12と、揺動テーブル14と、複数のリンク機構20と、当該リンク機構20を駆動するモータ26と、リンク機構20と揺動テーブル14との間に介在する連結部材と、を備える。リンク機構20は、モータの駆動に応じて、その上端位置がリンク機構面内で変化するものの、リンク機構面の位置およびリンク機構面の角度は不変である。連結部材は、スライド機構22と、X,Y,Z軸回りの回動を許容する回転ジョイントと、を有しており、揺動テーブル14がリンク機構20に対して回動およびスライドすることを許容する。そして、かかる構成とすることで、モータ26をベース12に固定設置(位置固定)することが可能となる。そして、結果として、リンク機構20、ひいては、揺動装置10の応答性を向上することができる。
(もっと読む)
スライド装置並びにスライド装置を用いた電子機器
【課題】本体部と重合部とを連結する回動リンク部の枢着部にカム機構を設けてチルトアップ機構を実現して薄型化を図れる構成となり、極めて簡易な構成で組み付けも極めて容易に実現できる極めて実用性に優れた画期的なスライド装置を提供すること。
【解決手段】回動リンク部5と共に回動するカム部6と、これと重合しすり合わせ相対回動するカム係合部7とを設け、このカム部6に対して相対回動するカム係合部7のすり合わせ面に、前記第一部材1に対する前記第二部材2のスライドに伴って第二部材2を重合面に対して起き上がり傾斜させるチルトアップカム面8を形成してチルトアップカム機構9を設けたスライド装置。
(もっと読む)
2部材間の力/トルクと回転運動とを補償および/あるいは伝達するための装置
本発明は、2つの部材間で力/トルクと回転運動とを補償および/あるいは伝達するための装置、とくに車両の動きを補償するための装置に関する。少なくとも1つのジョイントモジュールが2つの部材の間に設けられており、当該ジョイントモジュールによって、圧力媒体が供給されたピストンの並進運動および/あるいは回転運動は、少なくとも1つの第1回転シャフトあるいは第1と第2回転シャフトの回転運動に変換可能である。  (もっと読む)
(もっと読む)
携帯情報端末装置
【課題】出力が小さい小型のモータなどのアクチュエータにより携帯情報端末装置を開閉駆動できるようにし、また携帯情報端末装置の小型化、軽量化を図る。
【解決手段】 第1アーム21は下筐体2の前面4上に設けられ、DCモータ11の駆動により一端部の出力軸14を中心に回動する。第2アーム22は下筐体2の前面4上に設けられ、一端部が第1アーム21の他端部と回動自在に取り付けられている。ガイドレール21は下筐体2の前面上4に設けられ、下筐体2の長手方向をその長さ方向とする。滑りピン33は第2アーム22の他端部に取り付けられ、その一端部はガイドレール21に係合していて当該ガイドレール21内を摺動自在であり、他端部は上筐体3の底面6に取り付けられている。
(もっと読む)
1 - 10 / 12
[ Back to top ]