
国際特許分類[G01C21/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121) | 加速度または速度の積分によるもの,すなわち慣性航行 (68)
国際特許分類[G01C21/16]の下位に属する分類
国際特許分類[G01C21/16]に分類される特許
21 - 30 / 59
測位方法、プログラム及び測位装置
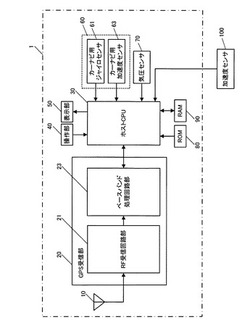
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
加速度センサを用いて歩行者の歩行タイミングを決定する携帯端末、プログラム及び方法

【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された加速度センサを用いて、正確な歩行タイミングを検出することによって、歩行者の進行方向をできる限り正確に決定する携帯端末等を提供することを目的とする。
【解決手段】携帯端末に含まれる歩行タイミング決定手段は、3軸の加速度データ(ax,ay,az)から、腕振り平面を作る2軸の加速度データ(ax',ay')に射影する射影手段と、2軸の加速度データ(ax',ay')から加速度ベクトル方向θを算出する加速度方向算出手段と、時刻的に隣り合う2つの加速度ベクトル方向の差分を算出する加速度方向差分算出手段と、加速度方向差分の極大点及び極小点となる時点を、腕部最上点として検出する腕部最上点検出手段と、時刻的に隣り合う2つの腕部最上点の中間の時点を、腕部最下点として検出する腕部最下点検出手段とを有する。
(もっと読む)
測位システム及び移動体
【課題】GPS衛星から送信される電波を受信することなく、正確な測位結果を算出することができるようにする。
【解決手段】通信部3−1による加速度ベクトルAr(tn)の受信時刻と送信時刻tn間の時刻差を示す伝播時間τc(tn)を算出する伝播時間算出部4−1を設け、相対位置・相対速度・相対時刻算出部5−1が自律航法センサ2−1により計測された加速度ベクトルAs(tn)、通信部3−1により受信された加速度ベクトルAr(tn)及び伝播時間算出部4−1により算出された伝播時間τc(tn)から、他の移動体1−2との相対位置δp、相対速度δv及び相対時刻δτを算出する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】現実的な移動体の移動を想定した適切な誤差推定を実現する測位方法等を提供す
ること。
【解決手段】慣性航法演算処理により随時求められる相対高度である第1高度変化「Δh
i」と、移動体である自動車の外気圧を検出する気圧センサの検出結果に基づいて算出さ
れる相対高度である第2高度変化「Δhb」との差「δh=Δhi−Δhb」が算出される
。そして、算出された高度変化の差「δh」、慣性航法演算処理により求められる自動車
の直進方向に対する左右方向の速度「vix」、及び、慣性航法演算処理により求められる
自動車の高度方向の速度「viz」に応じた観測値を用いたカルマンフィルタ処理が行われ
て、慣性航法演算処理の演算結果「(pi,vi,Ai)」に含まれる誤差「(δp,δv
,ε)」が推定され、推定された誤差を用いて慣性航法演算処理の演算結果が補正されて
、自動車の現在位置が測位される。
(もっと読む)
中間値判定装置と状態測定装置、中間値判定方法と状態測定方法、及び中間値判定プログラムと状態測定プログラム
【課題】出力値のバラつきを吸収して精度の良い測定値を得るための基準となる動的な中間値を求めることができる仕組みを提供する。
【解決手段】物体の状態を検知するセンサSより出力された測定信号を測定値特定装置1が取得し、アナログ・デジタル変換してデジタル値情報を生成する。中間値判定装置10では測定情報蓄積部11が、このデジタル値情報を測定値特定装置より取得し、複数蓄積する。次いで、中間値判定部12が、一定時間経過後、蓄積した複数のデジタル値情報の中で、頻度の高い値を中間値として一定時間ごとに判定する。そして、中間値出力部13が、判定した中間値を測定値特定装置へ出力する。
(もっと読む)
車両位置算出装置
【課題】 位置情報を取得した際の車両の向きによらず、現在の車両の位置を精度よく算出することができる車両位置算出装置を提供する。
【解決手段】 車両位置算出ECU1における進行方向検出部16は、受信エリア形状取得部12から出力された受信エリア形状情報、移動距離算出部13から出力された移動距離情報、および進路変更行動検出部14から出力された進路変更情報に基づいて、受信エリアにおける車両の進行方向を検出する。また、車両位置算出部17は、基準位置取得部11から出力された基準位置情報に基づいて基準位置(x,y)を設定し、相対位置変化検出部15から出力された相対変化情報に基づく相対変化(Δx,Δy)に、進行方向検出部16から出力された進行方向を加味して現在の車両位置を算出する。
(もっと読む)
集積化モノリシック・ジャイロスコープ/加速度計
【目的】単一の半導体基板上にジャイロスコープ、加速度計及びMPUを集積する。
【構成】多軸ジャイロスコープ(24)、単軸ジャイロスコープ(26)及び3軸加速度計が単一半導体基板(20)上にMPU(30)と共に形成される。ジャイロスコープは3つの相互に直角な軸(Z、X、Y)回りの回転の感知手段を提供し、加速度計は3軸(Z、X、Y)に沿う加速度の感知手段を提供する。MPU(30)はジャイロスコープ及び加速度計を制御及び駆動して連続的な位置表示を提供する。
(もっと読む)
飛しょう体及び飛しょう体に搭載される慣性装置の調定方法
【課題】 飛しょう体が備える慣性装置の調定を短時間で行うこと可能にする。
【解決手段】 飛しょう体の胴体外周に複数設けられた赤外線センサからの出力情報に基づき前記飛しょう体のロール角を求めるロール角推定手段と、前記飛しょう体の位置座標とピッチ角とヨー角とを算出するGPSジャイロとを有する姿勢角初期推定手段と、前記姿勢角初期推定手段から入力した前記ロール角に基づき、前記GPSジャイロがGPS衛星からのGPS信号を受信可能な姿勢に制御する操舵装置制御手段と、前記飛しょう体に搭載した慣性装置から入力した慣性情報と、前記姿勢角初期推定部から入力した前記飛しょう体の位置座標とロール角とピッチ角とヨー角とに基づき、前記慣性装置を調定して前記飛しょう体の位置と姿勢角を算出する航法装置とを備えるようにした。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
慣性航法を使用した実時間位置測量のための方法及び装置
【課題】慣性航法システムを使用して2つの地点の相対位置を決定する方法を提供する。
【解決手段】本方法は、INS(10)が第1の位置なあるときの位置誤差状態及び位置解を推定するステップと、INSが第2の位置にあるときの位置誤差状態及び位置解を推定するステップと、INSを第1の位置に戻すステップとを含む。第1及び第2の位置誤差状態の推定値は、INSを第2の位置から第1の位置へ戻す移行の間に生成された相関関係に基づいて調整される。
(もっと読む)
21 - 30 / 59
[ Back to top ]