
国際特許分類[G01C21/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121) | 加速度または速度の積分によるもの,すなわち慣性航行 (68)
国際特許分類[G01C21/16]の下位に属する分類
国際特許分類[G01C21/16]に分類される特許
31 - 40 / 59
完全性監視付きハイブリッドINS/GNSSシステムおよび完全性監視方法
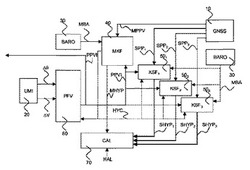
本発明は、慣性装置と衛星測位受信機とのハイブリッド化システムから得られる位置および速度情報の完全性の監視に関する。本発明は、より詳細には、閉ループにおいてハイブリッド化したINS/GNSSシステム(「慣性航法システム」および「全地球的航法衛星システム」を表す)として当業者に知られる航法装置に関する。 (もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム

【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
ナビゲーション装置、位置検出方法及び位置検出プログラム
【課題】測位情報を取得できないときであっても、移動体の速度及び現在位置を高精度に算出できるようにする。
【解決手段】自律速度算出ユニット11は、クレードル着脱検出部16からの着脱情報CDを基に、ナビゲーション装置1がクレードル4に装着されている場合、学習した取付傾きを用いて高精度な自律速度Vtを算出することができ、一方ナビゲーション装置1がクレードル4から取り外されたことを認識した場合、学習したセンサ座標系が変化したことを認識して学習結果である加速度センサ14の取付傾きを用いた自律速度Vtの算出を中止するため、誤った自律速度Vtの出力を未然に防止することができ、ナビゲーションユニット12における現在位置の算出精度を低下させずに済む。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
移動体のキャリブレーション装置およびこれを搭載した移動体並びにキャリブレーション方法
【課題】簡単な構成の装置で移動体の運動学パラメターを精度よく求めることができ、かつキャリブレーション作業に要する手間と空間を大幅に削減する移動体のキャリブレーション装置と方法および自己キャリブレーション機能を有する移動体を提供する。
【解決手段】モータ回転速度計測部と、移動体の回転速度計測部と、車輪を駆動するモータの回転速度指令を出力するモータ回転速度指令部と、前記モータ回転速度計測部の出力値と前記移動体の回転速度計測部の出力値とから前記移動体の運動学パラメターを得る演算処理部と、を備え、前記モータ回転速度指令部はキャリブレーションにあたって正負対称の定常波指令を一定期間出力するようにした。
(もっと読む)
慣性航法装置およびその誤差補正方法
【課題】AHRSとINSで構成を共通化し、温度計を使わずジャイロの温度ドリフト誤差を補正し、基準となる姿勢・方位データを使わずジャイロセンサ誤差と加速度計誤差を補正する慣性航法装置。
【解決手段】推定センサ誤差データからジャイロと加速度計の出力を補正するセンサ誤差補正計算部と、補正後の移動体の位置や姿勢を計算し、推定姿勢/方位誤差データより移動体の位置や姿勢を補正する航法・姿勢方位計算部と、補正後の位置や姿勢の情報と移動体上のGPSセンサの絶対位置と絶対速度と比較して、ジャイロにおける温度ドリフトの影響を分離する温度誤差推定部と、分離後の温度ドリフト等の影響よりジャイロと加速度計の出力の誤差を推定しセンサ誤差補正計算部で使用するセンサ誤差データを校正し、補正後の位置や姿勢の出力の誤差を推定し航法・姿勢方位計算部で使用する姿勢/位置誤差データを校正するセンサ固有誤差推定部とを有する。
(もっと読む)
車載用ナビゲーション装置のジャイロ基板取付構造
【課題】製造コストが安く、しかも、ジャイロの性能保証角度内で取付けられる車種が多い車載用ナビゲーション装置のジャイロ基板取付構造を提供する。
【解決手段】上シャーシ1と下シャーシ2が上下方向に固着され、上シャーシ1の底板1aに切起し加工により下方向に延びる舌片1bを形成し、前記舌片1bにジャイロ基板3を前記上シャーシ1の底板1aの上方に固定されたマザー基板5の下方位置に傾斜状態に固定した。
(もっと読む)
慣性航法システム
【課題】 簡単な構造で、姿勢がほぼ安定して長時間・長距離航行する移動体に用いる場合のジャイロ及び加速時計のドリフト・バイアス誤差を低減する慣性航法システムを提供する。
【解決手段】 慣性航法システム座標系の直交する三軸周りの角速度を検出する少なくとも3個のジャイロスコープ1と、慣性航法システム座標系の直交する三軸方向の加速度を検出する少なくとも3個の加速度計2とを有する慣性測定部Sを備えた慣性航法システムIにおいて、慣性測定部Sを上面に配置し、上面と直交する慣性航法システム座標系の一軸周りに回転をする回転台3と、回転台3の回転角を検出する回転角検出手段4とを有する回転台部Rと、慣性測定部Sと回転台部Rからの出力により姿勢情報及び位置情報を計算する演算部Cとを備えたことを特徴とする。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を得ることができる補正係数演算装置を得る。
【解決手段】新たな前記GPS情報を取得する度に、当該取得した現在のGPS情報と、それに対して近い側から順に過去のGPS情報を選択し、選択数が所定数に到達するまで、当該現在のGPS情報に対して更に過去のGPS情報の選択を繰返し、途中に、距離補正係数の演算に不適当と考えられるGPS情報が存在する場合は、学習を終了する。
(もっと読む)
最小限のオンボード処理による航法システム
【課題】
位置評価を与える航法システムを提供する。
【解決手段】
1つの実施例において、方法は3次元各々で加速度評価を積分することを含む。各次元の速度雑音エラーを決定するために、各次元の積分加速度評価から、各次元のGPS速度を減算する。各次元で速度雑音エラーをフィルタする。各次元の速度評価を得るために、各次元の積分加速度評価にフィルタした速度雑音エラーを加算する。各次元の積分速度評価を決定するために、各次元の速度評価を積分する。各次元の位置雑音エラーを決定するために、各次元の積分速度評価から、各次元のGPS位置を減算する。各次元の位置雑音エラーをフィルタし、各次元のフィルタされた位置雑音エラーを積分速度評価へ加算して、各次元の位置評価を得る。
(もっと読む)
31 - 40 / 59
[ Back to top ]