
国際特許分類[G01C21/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121) | 加速度または速度の積分によるもの,すなわち慣性航行 (68)
国際特許分類[G01C21/16]の下位に属する分類
国際特許分類[G01C21/16]に分類される特許
51 - 59 / 59
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
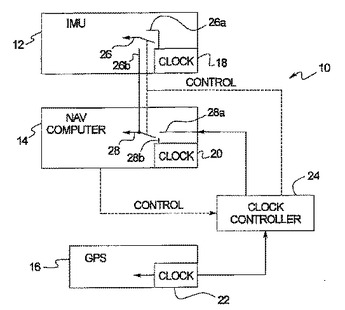
ディープインテグレーション用GPS/IMUクロック同期
航法システムは慣性計測ユニット、航法コンピュータ、GPS受信機、クロックコントローラを備える。慣性計測ユニットは第1のクロックと第1のスイッチを備え、航法コンピュータは第2のクロックと第2のスイッチを備え、GPS受信機は第3のクロックを備える。第1と第2のスイッチはクロックコントローラで制御される。このため、慣性計測ユニット、航法コンピュータ、GPS受信機においてそれぞれ自身のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータにおいて第2のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータとGPS受信機において第3のクロックを使用することができる。
 (もっと読む)
(もっと読む)
測定及び記憶された重力傾度を用いて慣性航法測定値の精度を改善する方法及びシステム
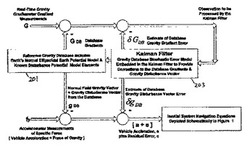
【課題】 重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムを提供する。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
(もっと読む)
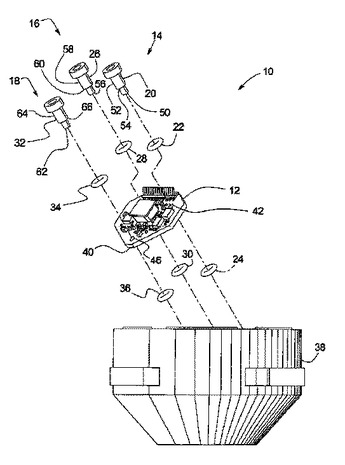
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
慣性航法装置
慣性航法装置

【目的】 慣性航法装置のジャイロ・加速度計パッケージとシャーシとの間に介在するクッションの経時的変形の影響による誤差を補正する。
【構成】 ジャイロ1及び加速度計2を収容したジャイロ・加速度計パッケージ3を、シャーシの底板上にクッションを介してほぼ平行に取付けるとともに、補正用加速度計11をシャーシに直接取付け、ジャイロ1で機体のピッチ軸及びロール軸回りの回転角速度ωθ及びωφを検出し、加速度計2で検出された機体7の静止時における重力Gの姿勢角方向成分a1,b1から計算した初期姿勢角θ1,φ1と、補正用加速度計11で検出された機体7の静止時における重力Gの姿勢角方向成分a2,b2から計算した初期姿勢角θ2,φ2とから姿勢角の誤差分θ1−θ2及びφ1−φ2を算出し、それら誤差分を補正した姿勢角θ′,φ′を得る構成である。
(もっと読む)
ヘッドマウントディスプレイにおける姿勢角検出装置
【課題】使用する場所や環境に制限されず、無限の空間で使用できるヘッドマウントディスプレイにおける姿勢角検出装置を提供すること。
【解決手段】ディスプレイ本体1には互いに直角な3軸の回りの角速度を検出する第1、第2及び第3のジャイロ5、6及び7と、上記3軸の回りの加速度を検出する第1、第2及び第3の加速度計8、9及び10とからなるセンサ部2を配置し、該センサ部2の出力する角速度に基づいて姿勢角の動的成分を、加速度に基づいて姿勢角の静的成分をそれぞれ算出し、使用者の頭部の動きに対応して姿勢角の動的成分と姿勢角の静的成分とを実際の姿勢角として選択的に出力する演算部3を備えた。
(もっと読む)
航法支援装置
航法支援装置
【目的】飛行データより地形のフラクタル特徴量を算出し、地形を推定、予測することにより、地図のない未知の場所においても地表の障害回避を可能とする、リアルタイム性に優れた小型・簡便で航空機等の飛行体に容易に搭載可能な航法支援装置を得ること。
【構成】電波高度計102と、航法装置103と、電波高度計及び航法装置からの現時点データ及び過去データを入力し、地形の起伏スペクトル、パワースペクトル及びフラクタル次元を算出し、地形スペクトルとフラクタル次元との相関処理を行い地形のフラクタル特徴を抽出し現時点の地形を推定する地形推定装置104と、地形推定装置出力より進行方向の地形を予測する地形予測装置112と、地形予測装置出力に応じて障害物の回避、飛行高度の変更等の航法制御情報を表示あるいは飛行制御を行う航法制御装置113とを備えている。
(もっと読む)
51 - 59 / 59
[ Back to top ]