
国際特許分類[G01C21/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121) | 加速度または速度の積分によるもの,すなわち慣性航行 (68)
国際特許分類[G01C21/16]の下位に属する分類
国際特許分類[G01C21/16]に分類される特許
41 - 50 / 59
ナビゲーション装置
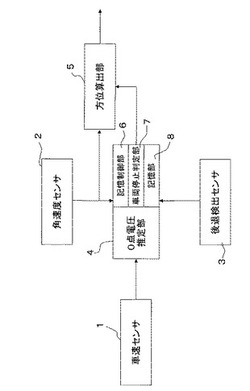
【課題】0点電圧の検出精度を向上させて車両の現在位置を正確に推定させることを可能とし、しかも特別な機構の追加を要さず、簡易に実現可能なナビゲーション装置を提供する。
【解決手段】車両の後退時にバックギアチェンジを検出する車両後退検出手段と、車速パルスから車両の走行状態を検出する走行検出手段と、車両の方位を検出する方位検出手段と、車両の現在時位置を推定する自車位置推定手段とを備え、前記車両後退検出手段でバックギアが入っていないことを検出し、かつ、前記走行検出手段で一定時間車速パルスが発生しないことを検知した場合に、前記方位検出手段の出力を基準値として記憶するように構成されている。
(もっと読む)
航法装置における連続的、不連続的慣性計器測定値の積分装置と方法
二種の慣性航法機器(12、14)の出力が、連続的に航法を提供する間、精度改善のため組み合わされる。本発明は光原子機器出力の性質を利用して、光原子機器(12)の「休止時間」中の従来型慣性センサーのドリフトの影響を和らげる一方、加速度と角速度情報の直接抽出を強いることなく高められた航行能力を提供する。 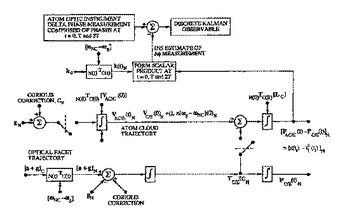 (もっと読む)
(もっと読む)
水中航走体の検出位置修正方法およびシステム

【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
一体型GPS慣性システム
GPS受信機の新たな設置にも改良にも適したGPS慣性システムは、GPSアンテナのハウジングに組み込まれた慣性センサを含む。慣性センサの出力は、GPSシステムで使用されるのと同じデータ変調方式を使用して変調され、GPS搬送波と同じ周波数のRF周波数搬送波に載せられる。慣性測定値はアンテナからのRF信号と同じケーブルを用いて受信機に送られ、受信機は、GPS位置信号からデータを復元するのに使用されるのと同じ方式を使用して、センサ信号からデータを復元する。従って、既存のGPS受信機のソフトウェアを変更することで、慣性センサの出力から位置推定や速度推定が可能になる。 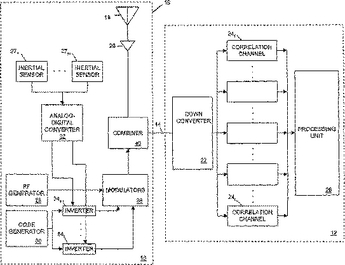 (もっと読む)
(もっと読む)
動的なCMGアレイおよび方法
コントロール・モーメント・ジャイロ(CMG)(10)の故障、あるいはスペースクラフト(S/C)質量特性またはミッションの変更を補償するようにCMG(10)を姿勢変更するための方法および装置が提供される。改良型のCMG(10)は、CMG(10)をCMGジンバル軸と平行でない軸(18)のまわりで回転させるための駆動手段を備える。CMGアレイ姿勢変更中を除いて、解除可能なクランプが、CMG(10)をスペースクラフトに固定する。CMGアレイ(50)は、姿勢センサ(102)、コマンドモジュール(104)、データおよびプログラムを格納するためのメモリ(108)、(好ましくは各CMG軸(18、22、30)ごとの)CMG駆動装置(112)およびセンサ(114)、ならびにこれらの要素を結合する制御装置(116)と組み合わされる。この方法は、CMG(10)が故障し、あるいはS/C特性またはミッションが変化したかどうか決定するステップ、アレイの作動中のCMG(10)を識別するステップ、スペースクラフト制御の向上のために新しいアレイ姿勢変更を決定するステップ、アレイのCMG(10)を解除し、姿勢変更し、再び固定するステップ、および新しいアレイ姿勢のためにS/C制御パラメータを更新するステップを備える。 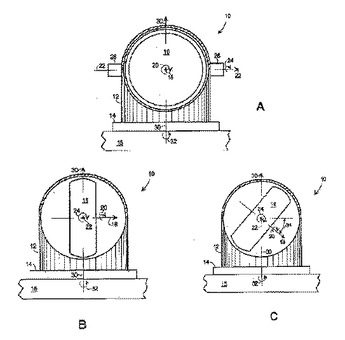 (もっと読む)
(もっと読む)
ナビゲーションシステム
【課題】 車両にスペース効率高く搭載できると共に、車両に作用する加速度を検出する加速度センサの削減を図ることができるナビゲーションシステムを提供する。
【解決手段】 車両には、各種システムの加速度センサ3〜5及びジャイロセンサ6が搭載されており、ナビゲーション装置7の制御回路8は、それらのセンサ3〜6からの検出信号に基づいて自律航法を行う。従って、ナビゲーション装置7は加速度センサを内蔵する必要がないので、加速度センサの検出方向に合わせてナビゲーション装置7の配置方向を合わせる必要がなくなり、ナビゲーション装置7の配置の自由度を高めることができると共に、加速度センサを削減することができる。
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 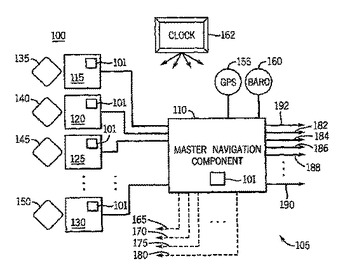 (もっと読む)
(もっと読む)
二重積分によって計算された測定に関連した絶対位置測定を使用することにより固体の移動を検出するための方法
本発明は、二重積分によって計算された測定に関連した絶対位置測定を使用して、固体の移動を検出するための方法に関するものであって、例えば、人体の移動の検出を意図している。本発明による方法においては、固体(2)の加速度を測定し、この測定の二重積分を行い、これにより、固体の第1並進移動に関する順次的な値を獲得し、さらに、特に回転といったような固体の少なくとも1つの第2自由度に関するの絶対位置測定を行う。本発明においては、回転測定を、並進移動測定へと変換し、並進移動測定を使用して第1並進移動を修正する。  (もっと読む)
(もっと読む)
41 - 50 / 59
[ Back to top ]