
国際特許分類[G01L5/22]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 力,応力,トルク,仕事,機械的動力,機械的効率,または流体圧力の測定 (8,098) | 特定の目的に適合した,力,例.衝撃によるもの,仕事,機械的動力またはトルクを測定する装置または方法 (2,038) | 制御部材,例.乗物の制御部材,引き金,に加えられる力を測定するもの (60)
国際特許分類[G01L5/22]に分類される特許
1 - 10 / 60
電動アシスト装置
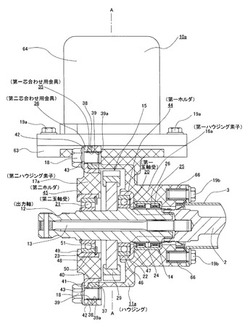
【課題】ハウジングを組み立てるべく、それぞれが合成樹脂製である第一、第二両ハウジング素子同士を結合した状態で、これら第一、第二両ハウジング素子同士の同軸度を十分に確保できる構造を実現する。
【解決手段】前記第一ハウジング素子16aの端部に円環状の第一芯合わせ用金具35を、インサート成形により、この第一ハウジング素子16aと同心に固定する。前記第二ハウジング素子17aの外周部に円環状の第二芯合わせ用金具36を、インサート成形により、この第二ハウジング素子17aと同心に固定する。そして、前記第一、第二両芯合わせ用金具35、36同士を嵌合させた状態で、前記第一、第二両ハウジング素子16a、17a同士を、複数本のボルト18、18により結合する。
(もっと読む)
自転車用センサの制御装置、自転車用センサの制御方法

【課題】自転車の回転部品の回転速度によらず、安定して自転車の走行状態に応じて変化する物理量を計測するセンサの制御装置を提供する。
【課題手段】回転部品を有する自転車に装着されるセンサの制御装置10であって、回転部品の回転状態を検出する検出部11と、検出部11の検出結果に応じてセンサ20における検出頻度を変更する制御部12と、を含む。これにより、当該制御装置10は、回転部品の回転状態に応じてセンサ20における検出頻度を変更することができる。
(もっと読む)
自転車用の力測定装置
【課題】自転車のクランク軸に及ぼされる力を正確に測定する力測定装置を提供する。
【解決手段】自転車用の力測定装置100は、ボトムブラケットシェル46とスピンドルの間に配置された第1のハーフシェル外壁21および内側管状壁22を有するスリーブシェル2と、内側管状壁22に接するように配置され、スピンドルに及ぼされる踏む力に対応して歪むことで変位するように構成された応用変形領域323を有するリング本体32と、センサ作動区域313を画定するセンサ保持ユニット31と、センサ作動区域313に配置されたセンサ331および磁性部材332を含むホール検出ユニット33を含んでおり、歪みによる変位によってこの磁性部材332の位置がずれることで、それにより生成される磁場を変えることにより踏む力の大きさを表す信号を発する。
(もっと読む)
電動自転車の人力駆動力検出装置
【課題】ペダルを踏む姿勢に起因する前方や後方への分力の影響を最小限に抑えることができて、チェーンなどの駆動力伝達体を前方に引張る力に対応する力を良好に検出することができる電動自転車の人力駆動力検出装置を提供する。
【解決手段】駆動スプロケット13によってチェーン15を前方に引張る力の反力によりクランク軸7aが後方へ弾性変形しようとする力を受けて弾性変形する弾性変形部23aを設け、この弾性変形部23aに歪み検出センサ24を取付ける。そして、弾性変形部23aおよび歪み検出センサ24を、側面視してクランク軸7aの軸心7a’から斜め下方に傾斜した後方位置からクランク軸7aの軸心7a’に向けて配設した。
(もっと読む)
操舵トルク検出装置、操舵トルク検出方法及び電動パワーステアリング装置
【課題】トルクセンサを用いずに操舵トルクを検出することができる操舵トルク検出装置及び操舵トルク検出方法、並びにトルクセンサを複数設けることなく2重系を構築することができる電動パワーステアリング装置を提供する。
【解決手段】モータ回転角センサ13の検出信号S1の周期と操舵角センサ18の検出信号S2との周期をそれぞれカウントし、それぞれの絶対角度を算出する。そして、これらの絶対角度の相対角度から操舵トルクT0を算出する。算出した操舵トルクT0とトルク検出値Tiとを比較することで、トルクセンサ3の異常を検出し、トルクセンサ3の正常時にはトルク検出値Tiを用いて操舵補助制御を行い、トルクセンサ3の異常発生時には、トルク検出値Tiに代えて操舵トルクT0を用いて操舵補助制御を行う。
(もっと読む)
ハンドル操作荷重検出装置
【課題】フロントフォーク等が異なる複数の車両に対して汎用性があり、しかも検出データを容易に比較できるハンドルの操作荷重検出装置を提供する。
【解決手段】ハンドルパイプ5の左側端部に左側検出装置10を取付ける。左側検出装置10はハンドルパイプ5に被さるグリップパイプ11を備え、その内側端部11aをピン13にてハンドルパイプ5へ可動に連結し、外側端部11bに荷重センサ15の外周部をネジ止めする。荷重センサ15の中心部を荷重検出支軸17の一端部へ固定し、荷重検出支軸17の他端部をハンドルパイプ5の内側へ圧入固定されている固定リング18へ圧入して荷重センサ15をハンドルパイプ5に固定する。グリップパイプ11へ力を加えると、グリップパイプ11とハンドルパイプ5の相対変位に基づく歪みを荷重センサ15が検出することでハンドルパイプ5に対する操作荷重を検出する。
(もっと読む)
回動操作具の荷重変位特性測定方法および荷重変位特性測定装置
【課題】回転操作具の回動中心、および回動中心から測定点までの距離が不明であっても、荷重変位特性を測定可能にする。
【解決手段】回動して操作される回動操作具の荷重変位特性を測定する荷重変位特性測定方法であって、レバー200に、操作力を検出する力センサを有するグリップ110を固定し、グリップの近傍にレバー200と共に回動する測定点Pを設定し、任意の位置に固定された距離基準点Qを設定し、3点以上の位置において、測定点と距離基準点の距離s、および力センサ112の座標軸に対する角度θを測定し、距離sと角度θから測定点Pの回転半径rを算出し、回転半径rと操作力fと角度θとからレバー200の荷重と変位の関係を求める。
(もっと読む)
電動パワーステアリング装置の調整装置及び調整方法
【課題】製品毎に生じる操舵力のバラツキを抑えられる電動パワーステアリング装置の調整装置及び調整方法を提供する。
【解決手段】電動パワーステアリング装置1の調整方法であって、トルクセンサ2がその出力特性を変えられるセンサ回路を備え、アクチュエータ51によって付与される入力トルクに応じてトルクセンサ2及び電動モータ4を作動させて操舵機構3が出力する操舵力を操舵力測定器52によって測定する操舵力測定工程と、操舵力測定器52によって測定される操舵力と予め設定される理想値との差をズレ量として算出するセンサ出力算出工程と、算出されるズレ量に応じて操舵力を理想値に近づけるようにセンサ回路の出力特性がセンサ出力調整器54によって調整されるセンサ出力調整工程と、を順に行う構成とした。
(もっと読む)
踏力センサ及びそれを利用した電動アシスト車
【課題】弾性体を利用した踏力検出において、弾性体の取付位置や長さ等のばらつきに起因する検出誤差を低減し、かつ広範囲での踏力検出が可能な踏力センサを提供する。
【解決手段】クランク軸14に固定された駆動ホイール30と、推進用車輪にクランク軸14の回転力を伝達するスプロケット50との間を、複数のバネ80〜90で連結するとともに、複数のバネ80〜90の圧縮開始のタイミングがずれるように、各バネ80〜90とその圧縮手段の間隔を設定する。駆動ホイール30とスプロケット50の位相差から踏力を検出するにあたっては、位相差の範囲に応じて利用するバネの本数が変化する。すなわち、位相差の範囲に応じて利用するバネ定数が異なるため、この変化するバネ定数に基づいて踏力が検出される。これにより、変位量と踏力の関係を非リニア化して所望の検出特性に近似させた踏力センサ10が得られる。
(もっと読む)
操舵操作力検出装置
【課題】操舵操作力の検出の際に生じる影響を除去し、より正確な操舵操作力を検出することができる操舵操作力検出装置を提供する。
【解決手段】右側分割リム12aと左側分割リム12bとを有するステアリングホイールリム12を備えたステアリングホイール1の操舵操作力を検出可能な操舵操作力検出装置30において、右側分割リム12aおよび左側分割リム12bに作用する3軸方向の力および3軸周りのモーメントからなる操舵操作力の6分力を検出可能な各ロードセル35a,35bと、ステアリングホイール1の操舵角を検出可能な操舵角検出センサ36と、操舵角検出センサ36により検出された操舵角の変位量に基づいて、ステアリングホイール1の回転によって右側分割リム12aおよび左側分割リム12bに作用する慣性力成分を導出し、導出した慣性力成分の影響を除去するように、各ロードセル35a,35bによって検出された分力を補正可能な慣性力成分補正部42と、を備えた。
(もっと読む)
1 - 10 / 60
[ Back to top ]