
国際特許分類[G01M17/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 機械または構造物の静的または動的つり合い試験;他に分類されない構造物または装置の試験 (8,636) | 車両の試験 (1,629) | 車輪付車両または無限軌道車両の (1,515) | 操縦性の;ローリングの (57)
国際特許分類[G01M17/06]に分類される特許
51 - 57 / 57
操舵特性の評価方法
【課題】 車両の操舵特性を確実に評価することができる操舵特性の評価方法を提供する。
【解決手段】 所定形状の波形に変化する操舵トルクを操舵機構に付与する操舵トルク付与工程と、付与された操舵トルクに対して変化する操舵機構の操舵角を検出する操舵角検出工程と、検出された操舵トルクに対する操舵角の特性を用いて、操舵特性の評価を行う評価工程と、を含む。
(もっと読む)
車両の重心位置の推定用装置
本発明は、車両の重心位置を推定するための方法及び装置に関し、重量負荷(12)を示す重量負荷変数(Z1)を記録する検出器(10、11)と、重心位置変数(hsp)を決定し、記録された重量負荷変数(z1)の関数として車両(14)の重心位置を与える評価ユニット(13)とを備える。本発明によれば、検出器(10、11)は空間的に、車両(14)のルーフ部に配置可能な追加的な負荷(12)の近くに設置される。これにより、評価ユニット(13)は、追加的な負荷(12)を示す重量負荷変数(z1)の関数として重心位置変数(hsp)を決定する。 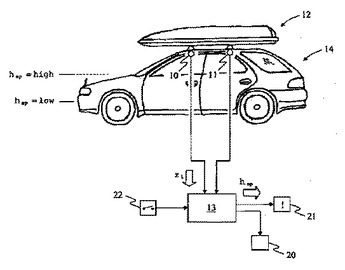 (もっと読む)
(もっと読む)
車両運動特性推定方法及び車両運動特性推定用コンピュータプログラム、並びに車両運動特性推定装置

【課題】走行中の車両の運動特性を高精度で推定できるようにすること。
【解決手段】車両運動特性推定装置10に任意の位置に移動させることのできる横Gセンサ40及びヨーレートセンサ41を設ける。また、当該車両運動特性推定装置10には車速センサ46など車両1の走行状態を検出するセンサが複数備えられており、この車速センサ46等で検出した走行中の車両1の走行状態より、重心31位置を推定する。前記横Gセンサ40等は、推定したこの重心31位置に移動させる。これにより、重心31位置での横G及びヨー角速度を検出することができる。この横G及びヨー角速度から車両1の運動特性の1つである車両サイドスリップ角を求めることにより、重心31位置で検出した横G及びヨー角速度から車両サイドスリップ角を求めることができる。この結果、走行中の車両1の運動特性を高精度で推定することができる。
(もっと読む)
車両/タイヤの操縦安定性のためのステア特性の定量的な分析方法

【課題】
車線変更と軌道走行の時に現れる過渡(transient)旋回条件でのステア特性を示すことができ、車両/タイヤ設計に直接適用できる現実的な車両/タイヤの操縦安定性のためのステア特性の定量的な分析方法を提供する。
【解決手段】 車両のステア特性をアンダーステア、オーバーステア、パワーオフ反応項目に分けて分析し、アンダーステアは、車両旋回軌跡に関連して旋回曲率と旋回速度の因子を使用し、オーバーステアは、車両姿勢に関連してノーズ角とノーズ角時間変化率を利用し、パワーオフ反応は、ノーズ角の勾配、変化率、及び変化量を利用し、これらの因子は、車両の挙動状態が安定した準定常状態のテストから得られた基準データと比較して、ステア特性を定量的に決定する。
(もっと読む)
車両の重心高演算装置
【課題】 車両の前軸と後軸とが同相で振動している場合であっても、車両の重心高さを正確に算出することができる車両制御装置を提供する。
【解決手段】 車両制御装置は、制御装置10を有しており、制御装置10には、加速度センサ11、横加速度センサ12、および各輪に設けられたストロークセンサ13〜16が接続されている。制御装置10には、加速度センサ11から前後加速度が出力され、横加速度センサ12から横加速度が出力される。また、各ストロークセンサ13〜16から出力されたサスペンションストロークから、前輪および後輪にそれぞれ掛かる荷重を算出する。制御装置は、前後加速度から求められる水平方向の力によって発生する第一モーメントと、前輪に掛かる荷重によって発生する第二モーメントと、後輪に掛かる荷重によって発生する第三モーメントとに基づいて、車両の重心高を算出する。
(もっと読む)
ステアリングロック装置の検査装置
【課題】イグニッションスイッチと、ステアリング軸の回動を阻止し得るロック機構とを少なくとも備えるステアリングロック装置の作動状態を、作業工数および作業スペースの低減を可能として検査可能とする。
【解決手段】支持台65上の保持手段66によって組立完了後のステアリングロック装置11を所定の姿勢に保持した状態で、可動台70を支持台65側に近接させ、キー14を保持するキーチャック手段73を先端部に有する回動軸71を回動駆動手段74で回動駆動することにより、ステアリングロック装置11のロータを回動駆動することができる。このロータの回動に応じたイグニッションスイッチ18のスイッチング態様変化をスイッチ信号検査手段67で検査するとともに、ロック機構の作動状態をロック作動状態検査手段で検査することにより、少なくともイグニッションスイッチ18およびロック機構の作動検査を連続的かつ自動的に行うことができる。
(もっと読む)
車両の旋回挙動制御機能検査装置および旋回挙動制御機能検査方法
【課題】 旋回挙動制御機能(VDC機能)を備えた車両について、そのVDC機能をインラインで且つ定量評価できるシステムを提供する。
【解決手段】 各ローラユニット16A〜16Dにて前車輪Wfr,Wfl,Wrr,Wrlを回転駆動させた状態でシステム制御装置2からの指示により車両搭載下のVDCコントロールユニットを強制駆動させる。各車輪Wfr,Wfl,Wrr,Wrlに加わる制動力を制動力計18にて検出してシステム制御装置にて適否判定する。ローラユニット16A,16Cの前後の回転ローラ14,15を離間させることにより車両Bを右側に急激に傾けてヨーレートと横加速度を発生させる。車両搭載下のヨーレート/横Gセンサが検出した値の適否をシステム制御装置2で判定する。
(もっと読む)
51 - 57 / 57
[ Back to top ]