
国際特許分類[G01P9/04]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | ジャイロスコープの効果を利用した速度測定,例.ガスを用いるもの,電子ビームを用いるもの (1,469) | 振動錘,例.音叉,をそなえた回転検出装置を用いるもの (1,436)
国際特許分類[G01P9/04]に分類される特許
101 - 110 / 1,436
角速度センサユニットおよびその信号検出方法
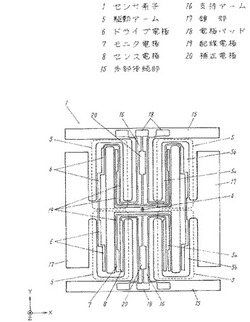
【課題】本発明は、コリオリ力を利用した角速度センサユニットおよびその信号検出方法に関し、角速度センサユニットの検出精度の劣化を抑制することを目的とする。
【解決手段】この目的を達成するために、角速度を検出する振動型のセンサ素子1およびそれを制御するIC2を内蔵するパッケージとからなる角速度センサユニットにおいて、センサ素子1は駆動アーム5にドライブ電極6、モニタ電極7、センス電極8を設けるとともに、駆動アーム5を支持する支持アーム16に設けられたモニタ電極7の配線電極19に補正電極20を設け、不要振動によりモニタ電極7に形成された不要信号を、同じ不要振動により補正電極20に形成された補正信号で減衰させる構造としたものである。
(もっと読む)
振動型角速度センサ

【課題】駆動錘と検出錘とを有する振動子を2つ備えた振動型角速度センサにおいて、外部衝撃に対する各駆動錘の同調性および各検出錘の同調性を高める。
【解決手段】駆動錘150、250は、当該駆動錘150、250がそれぞれ対向する部分に開口部152、252をそれぞれ備えている。また、検出錘140、240は、駆動錘150、250の内側にそれぞれ配置されている。そして、駆動連成梁400は、第1振動子100の駆動錘150と第2振動子200の駆動錘250とを直接連結している。一方、検出連成梁500は、駆動錘150、250の開口部152、252を介して第1振動子100の検出錘140と第2振動子200の検出錘240とを直接連結している。これにより、外部からの衝撃に対する各駆動錘150、250の同調性および各検出錘140、240の同調性の両方を高めることができる。
(もっと読む)
静電容量型物理量センサ及び角速度センサ
【課題】外来ノイズに対する耐性を維持しつつ、内部ノイズに由来するノイズを抑えられる構成とすることで、高精度な静電容量型物理量センサ及び角速度センサを提供することにある。
【解決手段】検出素子10は、外界からの物理量により変位可能に支持された可動体18と、検出電極Efとを有する。シールド配線16は、容量検出回路30の入力に接続された配線の周囲に配置され、低インピーダンスの直流電位に接続される。検出素子10と容量検出回路30の接続部の低インピーダンスの固定電位に対する入力容量の値Cinが、1.5pF<Cin<20pFの範囲とする。
(もっと読む)
光学機器
【課題】角速度センサと加速度センサの向きを精度良く決め、光学機器の内部で発生する振動が各センサに影響しないようにする。
【解決手段】光学機器は、角速度センサ302,303と、加速度センサ304と、これらセンサが実装されたフレキシブル基板301と、該フレキシブル基板を保持し、該光学機器の本体22に取り付けられるセンサ保持部材300とを有する。センサ保持部材は、互いに異なる方向を向く平面として形成され、フレキシブル基板における角速度センサの実装部分および加速度センサの実装部分をそれぞれ保持する角速度センサ保持面300b,300cおよび加速度センサ保持面300dと、本体に平面として形成された本体側取り付け面22eに対向する平面として形成され、該本体側取り付け面に振動吸収部材305を介して取り付けられる保持部材側取り付け面300aとを有する。
(もっと読む)
角速度検出装置
【課題】より高精度に変位量を検出する角速度検出装置を提供する。
【解決手段】角速度を検出する角速度検出装置であって、光源部から射出された光が入射する第1の振動子を備える振動部材と、前記第1の振動子を介した前記光のうち分岐された第1の光と第2の光とを干渉させる光学部材と、前記第1の光および前記第2の光に基づく干渉光を受光する受光部と、前記第1の振動子の回転運動によって生じる前記干渉光の干渉縞の変化をもとに、前記第1の振動子の変位を検出する検出部と、を備えることを特徴とする。
(もっと読む)
慣性センサ
【課題】本発明は、慣性センサの検知精度を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、支持梁11と、前記支持梁11により一端を支持された圧電体からなる駆動梁12と、前記支持梁11により一端を支持された圧電体からなる検出梁13と、前記駆動梁12及び前記検出梁13の他端に設けられた錘14とを備え、前記支持梁11がX軸方向及び前記X軸に直交するY軸方向へと伸びる略十文字形状をし、且つ前記略十文字形状の4つの先端が固定されている構成としたものである。
(もっと読む)
位置制御駆動を備えるマイクロエレクトロメカニカルジャイロスコープ及びマイクロエレクトロメカニカルジャイロスコープの制御方法
【課題】正確で信頼性が高く広範囲の開発に適した、マイクロエレクトロメカニカルジャイロスコープ及びマイクロエレクトロメカニカルジャイロスコープの制御方法を提供する。
【解決手段】MEMSジャイロスコープは、固定構造体6と、駆動軸Xに従って前記固定構造体6に関して可動な駆動質量体7と、前記駆動軸Xに従って運動状態になるように駆動質量体7に機械的に連結され、且つ、微細構造体2の回転に応答して、駆動軸Yに従って前記駆動質量体7に関して可動な検出質量体8とを有する微細構造体2、及び、駆動周波数で前記駆動質量体7を振動状態に維持するための駆動装置3を備える。前記駆動装置3は、前記駆動軸Xに関して駆動質量体7の位置を検出するための離散時間検出インタフェース20と、前記駆動子質量体7の位置に基づいて駆動周波数を制御するための制御手段21、23、24、25とを備える。
(もっと読む)
回路モジュールおよびその製造方法
【課題】特別な部品を用いることなく、安定でかつ垂直実装が可能で、かつ製造の容易な回路モジュールを提供する。
【解決手段】少なくとも、主表面である第1の面10Aに配線導体層を有するとともに、素子搭載領域を有し、前記第1の面が鉛直方向に沿うように設置される垂直実装用の回路基板と、前記素子搭載領域に搭載される素子チップ20A,20Bとを有する回路モジュールであって、実装面の中心を通りかつ、前記回路基板10の前記素子搭載領域形成面に平行な中心面上に、回路モジュールの重心が位置するように形成されたことを特徴とする。
(もっと読む)
角速度センサ
【課題】本発明は、角速度センサの耐衝撃性を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、駆動信号を出力する駆動回路(図示せず)と、前記駆動信号が入力されることにより慣性力が検出可能となる検出素子と11を備え、前記検出素子11は、基部12と、前記基部12にその一端が接続されるとともに前記駆動信号により振動するアーム13と、前記アーム13の他端に接続されるとともに前記アーム13の振動に伴い振動する錘14と、を有し、前記錘14の振動方向には前記錘14と空隙を介して第1の振幅上限部16が設けられた角速度センサとしたものである。
(もっと読む)
多軸角速度センサユニットの製造方法
【課題】本発明は、互いに直交する3軸に対応する角速度をそれぞれ検出する多軸角速度センサユニットの製造方法に関し、多軸角速度センサユニットにおける検出レベルの測定工程を簡略化し生産性を高めることを目的とする。
【解決手段】本発明は、互いに直交する検出軸7,8,9として角速度を検出する多軸角速度センサユニットにおいて、パッケージ5の内部にセンサ素子1,2,3およびIC4を配置した後に、X軸、Y軸、Z軸で構成する座標系(X,Y,Z)における(1,1,1)で示される軸を回転軸24とし多軸角速度センサユニットを回転させて各センサ素子1,2,3の角速度を検出し、この検出結果を予めIC4に格納しておいた基準値データと比較させ各センサ素子1,2,3の検出レベルの補正値を設定する。
(もっと読む)
101 - 110 / 1,436
[ Back to top ]