
国際特許分類[G01S13/72]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328) | 二次元追跡のためのもの,例.角度追跡と距離追跡の結合,トラック・ホワイル・スキャン・レーダ (40)
国際特許分類[G01S13/72]に分類される特許
31 - 40 / 40
レーダ装置
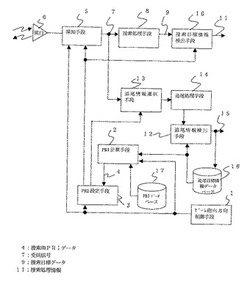
【課題】 捜索と追尾を同時に行うレーダ装置において、追尾目標をクラッタやブランキングの影響なしに追尾可能なPRIを含んだPRIの組合せにて捜索を行うことにより、捜索処理に必要なPRIの組合せにて、精度良く追尾を行う。
【解決手段】 ビーム指向方向制御手段1からのビーム指向方向に応じて捜索に必要なPRIの組合せを計算するPRI計算手段2と、計算されたPRIの組合せにて電波の送受信を行う探知手段5と、目標追尾に対応したPRIによる受信信号7を選択する追尾情報選択手段13と、この受信信号7から目標検出を行う追尾処理手段14と、追尾処理手段14の処理結果から追尾処理を行う追尾情報検出手段12を設けた。
(もっと読む)
多目標追尾装置

【課題】従来の多目標追尾装置は、N次元の相関を毎サンプリング毎に求めるため演算負荷が大きく、また許容可能な時間で解導出を繰り返しても閾値条件を満たす準最適解を得ることができず、尤度の低い相関解しか得られないことがある。
【解決手段】センサの観測回数が設定値の整数倍か否か判別し、整数倍以外のときは、2次元相関算出部で観測値と既追尾航跡の相関を取り、新たな航跡を生成・出力し、整数倍のときは、コスト行列更新部で観測値からコスト行列を1サンプリング毎に更新しながら算出し、Lagrange乗数設定部でコスト行列に基づきLagrange緩和法により求められたLagrange乗数によってLagrange緩和解算出部で緩和された制約条件下で相関解を計算し、実現可能解算出部でこの緩和解を修正して全ての制約条件を満たす解を求め、新たな航跡を生成・出力する。
(もっと読む)
航跡生成システム、その誤差共分散行列初期値設定装置、航跡生成方法およびその誤差共分散行列初期値設定方法
【課題】誤差共分散行列初期値として適切な値を算出し設定することによって、航跡を生成した直後における航跡諸元の精度および安定性を向上させる。
【解決手段】所定状態および誤差共分散行列の初期値を設定してその後の状態および誤差共分散行列を推定するカルマンフィルタを用いたシステムにおける前記誤差共分散行列の初期値を設定する誤差共分散行列初期値設定装置10において、前記誤差共分散行列初期値を、時間が経過するとともにある観測値が入力されるだろうと想定して状態の誤差を適切な値へ収束させる誤差共分散行列初期値収束手段14を有する。
(もっと読む)
レーダ装置
【課題】 クラッタマップ部を小型化し、クラッタによる誤警報を抑圧するレーダ装置を提供する。
【解決手段】 仰角情報及び送受信方向情報に基づき、低仰角走査時には、受信機の出力信号とメモリ203に蓄えられた信号との間で平均化処理を実施して結果をメモリ203に蓄え、中高仰角走査時には、低仰角走査時に処理されてメモリ203に蓄えられた方向j−1,j,j+1の信号に対して、ウエイト発生器204で発生した重み付け係数を乗算器201C〜201Eで乗算し、その結果得られた信号の総和を総和器205で計算する。
(もっと読む)
航跡相関統合装置
【課題】目標情報のより状況認識を行い易い表示を提供できる航跡相関統合装置を得る。
【解決手段】最初の航跡相関統合は、レーダ航跡生成部1で生成された航跡と角度センサ航跡生成部2で生成された航跡の全ての組合せの相関の尤度を計算して航跡同士の組合せの相関の有無を判定し、2回目以降の航跡相関統合は、レーダ航跡生成部1及び角度センサ航跡生成部2で生成された航跡と既存のグループの相関の尤度を計算して前記航跡と前記グループとの相関の有無を判定する航跡相関部3と、航跡相関部3により相関有りと判定された航跡同士、又は航跡と既存のグループは必ず同一のグループに入るようにグループ化し、グループの中心位置と広がりを計算するグループ処理部4と、1対1対応がとれた航跡群は統合航跡を表示し、1対1対応がとれない航跡群は前記グループの中心位置と広がりに基づきグループを楕円で表示する統合航跡・グループ表示部6とを設けた。
(もっと読む)
電波照射装置、および誘導装置
【課題】 海面からのマルチパスの影響によって、目標体に照射され目標体で反射される反射波のレベルが低下するという問題があった。
【解決手段】 目標体の存在方向、目標体高度および目標体までの距離の情報を計測し、計測した目標体の情報に基づいて、アレイアンテナ装置の送信ビームの指向方向を、目標体の存在方向から所定角度だけ上方にオフセットさせることによって、目標体に照射される電波に対するマルチパスの影響を緩和することができる。
(もっと読む)
アンテナ予報値作成プログラム
【課題】 無駄な逆回転が生じることのない追尾装置用のアンテナ予報値をコンピュータに作成させるアンテナ予報値作成プログラムを提供することを目的とする。
【解決手段】 正回転又は負回転により方位角を制御可能な追尾装置20用のアンテナ予報値を作成するコンピュータ10に、供給されたアンテナ予報値の示す方位角存在範囲が追尾装置20の駆動制限にかかるか否かを判定する判定ステップと、アンテナ予報値の示す方位角存在範囲のうち、駆動制限にかかる方位角存在範囲を逆回転の方位角に変換する変換ステップとを実行させることにより上記課題を解決する。
(もっと読む)
レーダ装置
【課題】 レーダ装置の運用状態に応じて、データレーまたは目標の検出確率を向上させて最適化を図ることができるレーダ装置を提供することを目的とする。
【解決手段】 レーダ装置は、送信信号を空間に電波として放射し、空間からの電波を受信する空中線2と、送信信号を生成し、空中線2を送信する送信器1と、空中線2で受信した電波を増幅し、周波数変換して受信信号を生成する受信器3と、受信器3からの受信信号をパルス圧縮し、目標情報を抽出する目標検出器4と、目標情報に基づいて、ヒット数を制御するヒット数制御器5とを備えている。
(もっと読む)
データ処理装置
【課題】 処理負荷が絶えず変化する環境の中で、信号処理の規模にふさわしい回路規模を有する、小型軽量化されたデータ処理装置を得る。
【解決手段】 捜索処理及び追尾処理の2種類の信号処理に対応してデータ処理部10及びデータ処理部20を設け、それぞれに単一の信号処理として、データ処理部10には捜索処理を、またデータ処理部20には追尾処理を割り当てるとともに、いずれのデータ処理部も、複数のDSPを用いて信号処理の負荷に応じた規模に構成する。
(もっと読む)
測高レーダ装置とその測角処理方法
【課題】 マルチパスによる測高精度の劣化を低減し、目標検出率を向上させる。
【解決手段】 仰角方向に連続した複数のビーム#1〜#3で目標を検出する場合、マルチパスの影響を受けた下側ビームの受信感度が最大となっている場合でも、他のビームでは正しい測角結果を出力している事象が多く得られることに着目し、仰角方向に受信強度分布に谷ができた目標要素をクラッタとして棄却するのではなく、下側ビーム#1以外で受信強度が最大となったビーム#3の測角値を採用する。これにより、マルチパスの影響を受けた場合でも、検出率を下げることなく測高精度の劣化を低減することが可能となる。
(もっと読む)
31 - 40 / 40
[ Back to top ]