
国際特許分類[G01S13/72]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328) | 二次元追跡のためのもの,例.角度追跡と距離追跡の結合,トラック・ホワイル・スキャン・レーダ (40)
国際特許分類[G01S13/72]に分類される特許
11 - 20 / 40
レーダ装置
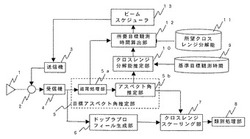
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
目標追尾装置

【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
目標追尾装置
【課題】多次元相関決定時の演算負荷の減少を実現しかつ許容可能な解を導出する目標追尾装置を得る。
【解決手段】センサ観測値を入力情報とする航跡候補コスト行列生成手段110Aと、航跡分離状況判定手段130と、多次元相関決定手段120とを備えている。航跡候補コスト行列生成手段110Aは、航跡候補行列と、航跡候補の各々に対応するコストからなるコスト配列とを生成する。航跡分離状況判定手段130は、航跡が分離していると判定された場合には、航跡候補コスト行列生成手段110Aに対し、航跡候補行列と航跡候補の各々とに対応するコストからなるコスト配列を再生成するように指示する。多次元相関決定手段120は、航跡候補行列とコスト配列とからLagrange緩和法を用いて、N+1次元割当問題を2次元割当問題の繰り返しとして解くことにより、最適航跡組み合わせを抽出する。
(もっと読む)
レーダ装置
【課題】任意の方向にビーム走査を行って目標の追尾を行うレーダ装置において、クラッタマップを用いてクラッタによる誤警報を抑圧する。
【解決手段】クラッタマップ部11は、捜索/追尾区分情報及び送受信方向情報に基づき、捜索時には、受信機の出力信号の距離・方向毎に、時間方向の平均値を算出してクラッタマップを生成し、追尾時には、捜索時に生成したクラッタマップにアンテナのサイドローブ形状に基づいて重み付け合成処理をした信号を検出部に出力する。
(もっと読む)
レーダ装置
【課題】障害発生時の運用中断の期間を短縮して可用性を向上させたレーダ装置を得る。
【解決手段】分割した覆域毎に対応させて設けられた複数の空中線を有するレーダ装置において、同一に構成された複数個の単位空中線を有する主空中線部と、この主空中線部から離間して設置された回動可能な1個の単位空中線を有する副空中線部とを用いて、レーダ波を送受信する空中線部を構成する。そして、主空中線部内の単位空中線の動作を監視し、動作異常が検出された場合には、副空中線部を、この動作異常となった単位空中線の代替として、直前までの動作状況を引き継ぎつつ、その動作を継続させるように制御する。
(もっと読む)
レーダ装置
【課題】高い追尾性能を有する小型かつ安価なレーダ装置を提供する。
【解決手段】目標の予測ゲート内で目標からの反射波を、予測ゲート外で目標からの送信波をそれぞれ受信して電気信号に変換し、受信信号として出力する受信部7と、受信部から出力される予測ゲート内または予測ゲート外の1つ以上の受信信号を用いて目標の角度を測定する測角処理部2と、受信部から出力される予測ゲート内で得られた受信信号を用いて目標までの距離および角度を測定する測距・測角処理部3と、測角処理部で測定された目標の角度を表す測角データと測距・測角処理部で測定された目標までの距離および角度を表す測距・測角データとに基づき目標を追尾する追尾処理を実行するとともに、目標の予測ゲートを生成して受信部に送る追尾処理・制御部10を備える。
(もっと読む)
レーダ装置
【課題】目標が複数存在し、目標の距離と角度のペアが不明な状況下でも、誤ったペアによる偽目標を排除し、正しいペアリング結果を出力可能なレーダ装置を得る。
【解決手段】距離・角度観測値を生成する距離・角度観測値検出部1と、複数の仮説を生成する仮設生成部4と、初期の距離・角度観測値を生成する初期状態量設定部5と、予測値と観測値との相関処理結果に基づいて、相関のとれた距離・角度観測値を選抜する相関処理部7と、観測値に基づいて予測値を算出する追尾フィルタ部8と、仮説の対数尤度を算出し、全サンプルの仮説の対数尤度の和およびサンプル数を算出する対数尤度算出部9と、サンプル数が所定の閾値以上である場合に仮説毎の対数尤度の和を出力するサンプル数判定部11と、信頼度が最大となる仮説に含まれる距離と角度のペアをペアリング結果として出力する最大信頼度仮説判定部12とを備える。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置を提供する。
【解決手段】目標の信号を検出する目標検出器10と、目標検出器10により検出した信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブとの相関の程度を計算し、レンジサイドローブ相関処理の相関計算結果から重み付け計算によって目標検出器10により検出した信号に対し重み付けを行い、重み付け計算の結果を考慮したMHT(Multiple Hypothesis Tracking)により追尾処理を行う追尾処理器20と、追尾処理器20の結果を表示するための航跡表示器30を備える。
(もっと読む)
多目標追尾装置
【課題】追尾の難易度に応じてアルゴリズムの切り換えを行うことができる多目標追尾装置を得る。
【解決手段】前観測時刻でMHT追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合は、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、MFA処理で相関解を生成するMFA追尾処理部4と、前記第1及び第2の条件の何れかの条件を満たさない場合は、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5とを設けた。
(もっと読む)
レーダ装置
【課題】方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。
【解決手段】アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から前記複数の個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタとを備えた。
(もっと読む)
11 - 20 / 40
[ Back to top ]