
多目標追尾装置

【課題】追尾の難易度に応じてアルゴリズムの切り換えを行うことができる多目標追尾装置を得る。
【解決手段】前観測時刻でMHT追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合は、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、MFA処理で相関解を生成するMFA追尾処理部4と、前記第1及び第2の条件の何れかの条件を満たさない場合は、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5とを設けた。
【解決手段】前観測時刻でMHT追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合は、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、MFA処理で相関解を生成するMFA追尾処理部4と、前記第1及び第2の条件の何れかの条件を満たさない場合は、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5とを設けた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーダ等のセンサシステムにおいて、目標位置を観測するセンサから得られる観測値を使って航跡を生成する追尾技術に関し、特に、この追尾に関して相関の問題を多次元的に解く技術において、演算時間を削減し、かつ良好の追尾性能を実現するための相関解を導出する多目標追尾装置に関するものである。
【背景技術】
【0002】
現在、センサにより目標を観測して得られた観測値を使って目標を追尾する技術については既に多くの論文、特許等の文献で取り挙げられており、その装置および方法については様々な提案がなされている。
【0003】
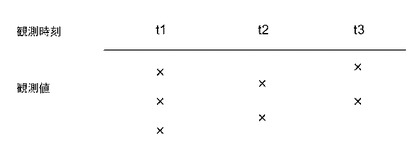
近接多目標を追尾する場合や、クラッタ等の不要信号環境下で目標を追尾する場合、相関の決定方法は追尾性能を左右する重要な部分である。相関とは、図12に示す様な、各観測時刻で複数の観測値が得られた場合、「観測時刻t1から観測時刻t3に至るどの観測値を同じ目標と見なすか」を示すものである。
【0004】
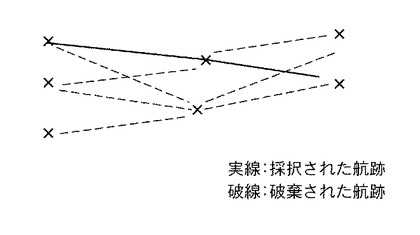
この相関決定の方式としては、図13に示す様に、各観測時刻毎に航跡を生成し、1観測時刻前の航跡と最新観測時刻の観測値の対応付けを行う方式が用いられてきた。この航跡と観測値の2次元の相関を決定する方法については様々なものがあるが、一つの例としては、各々の既存航跡に対して可能な相関全てを考慮して仮説を構成し、各々の相関の尤もらしさを基に仮説の信頼度を計算する多重仮説追尾法(MHT:Multiple Hypothesis Tracking)がある(例えば、非特許文献1参照)。
【0005】
上記の技術は既存の航跡と最新の観測値の割り当てを決定する方式であるが、さらなる相関性能の向上を目指し、図14の様に、複数観測時刻に跨る観測値の相関をまとめて計算して航跡を生成するアルゴリズムとして複数フレーム割当法(MFA:Multiple Frame Assignment)がある(例えば、非特許文献2参照)。なお、ここでフレームとは、1観測時刻において得られた観測値の集合である。
【0006】
この複数フレーム割当法では、N(自然数)観測時刻に跨る観測値の相関決定をN次元の割り当て問題に変換して解く。定式化された割り当て問題を以下に示す。
【0007】
【数1】

【0008】
ここで、コスト行列ci1,…,iNは、観測値i1,…,iNから航跡を生成するのにかかるコストであり、通常、航跡尤度比の逆数を使用する。
【0009】
【数2】
【0010】
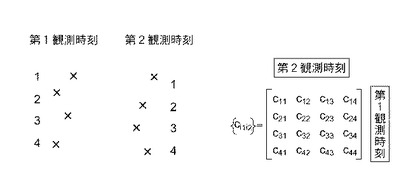
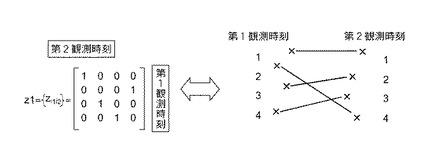
上記の割り当て問題は、コスト行列の各次元から要素を一つずつ選択して、選択した要素を最小にするという問題である。簡単な例として、N=2の場合の観測値と対応するコスト行列の例を図15に示す。このコスト行列から得られる解の例と対応する航跡の構成を図16に示す。この解によるコストは、「1」が設定された部分に対応するコスト行列の要素の和をとって、c11+c24+c32+c43となる。また、制約条件は、「1」と設定される要素の列が重複してはならないことを示す。例えば、図17の様な、相関決定は、第2観測時刻における第2要素に重複して「1」が設定されており、制約条件を満たさない。これは追尾において、1つの観測値を重複して使用していることに相当する。
【0011】
以上に説明したN次元の割り当てで実現可能な(制約条件を満たす)解の数は、観測値の数に応じて指数的に増加する。そのため、コストを最小とする最適解を得るためには、処理時間が観測値の数や処理する次元数Nに応じて指数的に増加するという問題がある。これを解決するために、上記の非特許文献2で示されている方式ではラグランジェ(Lagrange)緩和法を使って、N次元の割り当て問題を2次元に緩和しながら準最適な解を得る。
【0012】
非特許文献2で示された従来の複数フレーム割当法による多目標追尾装置について図18及び図19を参照しながら説明する。図18は、複数フレーム割当法による従来の多目標追尾装置の構成を示す図である。また、図19は、複数フレーム割当法による従来の多目標追尾装置の動作を示すフローチャートである。
【0013】
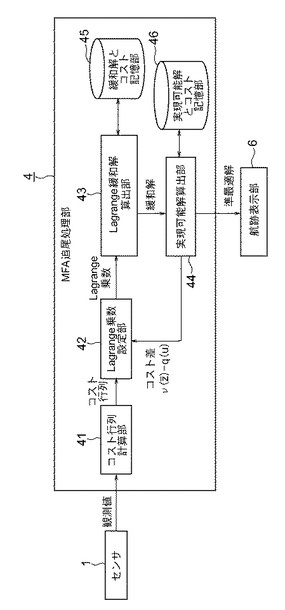
図17において、従来の複数フレーム割当法による多目標追尾装置は、目標位置を観測するセンサ1と、MFA追尾処理部4と、航跡表示部6とが設けられている。また、MFA追尾処理部4は、コスト行列計算部41と、Lagrange乗数設定部42と、Lagrange緩和解算出部43と、実現可能解算出部44と、緩和解とコスト記憶部45と、実現可能解とコスト記憶部46とが設けられている。
【0014】
まず、ステップ901において、コスト行列計算部41は、センサ1から得られた過去から最新までのN観測時刻分の観測値を入力する。
【0015】
次に、ステップ902において、コスト行列計算部41は、各観測時刻から一つずつ観測値を選択し、その観測値の組み合わせによって形成される航跡の尤度比を計算し、その逆数を使ってコスト行列を計算する。
【0016】
次に、ステップ903において、Lagrange乗数設定部42は、制約条件を緩和するためのラグランジェ乗数の設定を行う。このラグランジェ乗数は、第3観測時刻から第N観測時刻に至る観測値全てについて設定される。
【0017】
観測値jrに関するラグランジェ乗数をujrとする。このラグランジェ乗数を設定することにより、N次元のコスト行列の第1次元〜第N次元の観測値に関する制約を2次元に緩和することができる。この緩和によりコスト関数は2次元のコスト行列に変形され、その要素は以下の式で表せる。
【0018】
【数3】
【0019】
このステップ903における処理の一例として、初期のラグランジェ乗数を全て0に設定する。
【0020】
次に、ステップ904おいて、Lagrange緩和解算出部43は、乗数によって緩和された2次元の割り当て問題の解を算出する。この2次元解の算出方法は、ハンガリー法等の高速な解導出方式があり、そのうちの何れかを使用する。導出された緩和解のコストをq(u)とし、緩和解とコスト記憶部45に記憶する。
【0021】
次に、ステップ905において、実現可能解算出部44は、上記の緩和解を修正して、全ての制約条件を満たす実現可能解を導出する。導出された実現可能解のコストをν(オーバーラインz)とし、実現可能解とコスト記憶部46に記憶する。なお、オーバーラインzは、zの上に−があることを表す。
【0022】
次に、ステップ906において、実現可能解算出部44は、ラグランジェ緩和解のコストq(u)と実現可能解のコストν(オーバーラインz)の差をq(u)で割った値を算出し、それがあらかじめ設定した閾値パラメータ以下であったら、ステップ908へ進む。また、閾値条件を満たさない場合は、ステップ907へ進む。
【0023】
ステップ907において、閾値条件を満たさない場合には、Lagrange乗数設定部42は、ラグランジェ乗数の再設定を行う。この再設定では、最新の緩和解における制約条件の逸脱具合に応じた乗数設定を行う。
【0024】
このラグランジェ乗数再設定ステップ907を実行した場合は、以降、ラグランジェ緩和解算出ステップ904と、実現可能解算出ステップ905が、閾値条件を満たすまで繰り返される。
【0025】
ステップ908において、航跡表示部6は、実現可能解をこのN次元割り当て問題の準最適解として出力する。
【0026】
上記の複数フレーム割当法MFAは、相関性能が高いものの、演算負荷が重いという問題があった。この問題を解決するために、複数フレーム割当法による追尾方式と2次元相関による追尾方式を併用する技術が提案されている(例えば、特許文献1参照)。
【0027】
図20は、この併用技術の構成を示す図である。この併用技術では、観測時刻を観測間隔で割った値(処理回数)があらかじめパラメータとして設定されていた値nの倍数である場合には複数フレーム割り当て処理を行い、そうでない場合には2次元相関算出処理を行う。
【0028】
【特許文献1】特開2007−212244号公報
【非特許文献1】Donald B. Reid “An Algorithm for Tracking Multiple Targets”(IEEE Transactions on Automatic Control, Vol.AC-24, No6, December,1979)
【非特許文献2】A. B. Poore and A. J. Robertson III “A New Multi-dimensional Data Association Algorithm for Multisensor-Multitarget Tracking”(Proc. Of SPIE vol.2561,1995)
【発明の開示】
【発明が解決しようとする課題】
【0029】
追尾における相関処理は、センサの探知状況が良好で周囲に他の目標や不要信号が存在しない場合は正解を導くのが容易であるが、目標の探知抜けが起きたり、周囲に不要信号が発生したりする場合には困難となる。容易な場合には従来の2次元相関による追尾方式で十分であり、困難な場合にはMFA追尾方式を適用した方が、一般に正解が得られる確率が高い。よって、追尾が容易な場合に2次元相関を適用し、困難な場合にMFA追尾処理を適用する切り替え方式が理想的である。しかし、上記の特許文献1の従来技術は、二つの追尾アルゴリズムの切り替え時期が固定的であり、追尾の難易度によってアルゴリズムの切り替えを行うことができないという問題点があった。
【0030】
この発明は、上述のような課題を解決するためになされたもので、その目的は、追尾の難易度に応じてアルゴリズムの切り換えを行うことができ、演算負荷の削減と正確な相関解の導出を両立させることができる多目標追尾装置を得るものである。
【課題を解決するための手段】
【0031】
この発明に係る多目標追尾装置は、前観測時刻で多重仮説追尾法による追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合には、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、前記第1及び第2の条件の何れかの条件を満たさない場合には、センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、前記MHT追尾処理部による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部と、前記MFA追尾処理部で生成された相関解を前記MHT追尾処理部の仮説として置き換えるMHT仮説設定部とを設けたものである。
【発明の効果】
【0032】
この発明に係る多目標追尾装置は、追尾の難易度に応じてアルゴリズムの切り換えを行うことができ、演算負荷の削減と正確な相関解の導出を両立させることができるという効果を奏する。
【発明を実施するための最良の形態】
【0033】
実施の形態1.
この発明の実施の形態1に係る多目標追尾装置について図1から図7までを参照しながら説明する。図1は、この発明の実施の形態1に係る多目標追尾装置の構成を示す図である。なお、各図中、同一符号は同一又は相当部分を示す。
【0034】
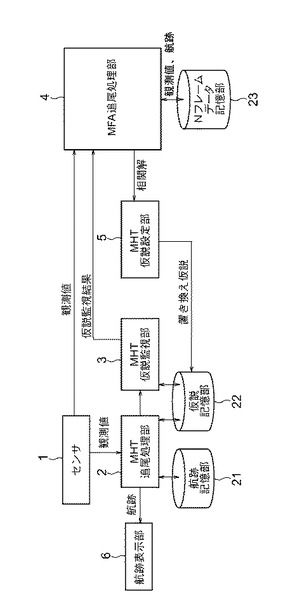
図1において、この発明の実施の形態1に係る多目標追尾装置は、目標位置を観測するセンサ1と、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理部2による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部4と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5と、航跡をユーザに表示する航跡表示部6と、航跡を記憶する航跡記憶部21と、仮説を記憶する仮説記憶部22と、Nフレーム分の観測値、航跡を記憶するNフレームデータ記憶部23とが設けられている。
【0035】
つぎに、この実施の形態1に係る多目標追尾装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。
【0036】
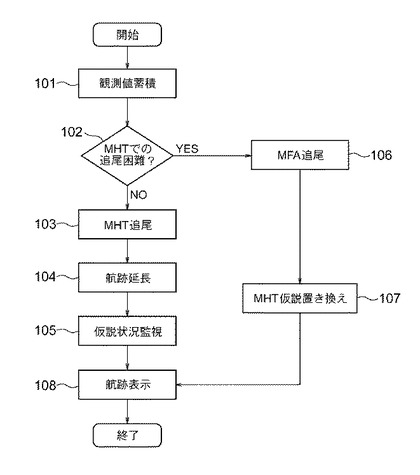
最初に、ステップ101において、センサ1から観測された観測値が装置に入力され、それを観測値記憶部(図示せず)に蓄積しておく。
【0037】
次に、ステップ102において、以下の条件(a)及び(b)を共に満たす場合には、複数フレーム割当法(MFA)による追尾処理を選択し、ステップ106に移行する。
(a)前観測時刻で多重仮説追尾法(MHT)による追尾処理が実行された場合。
(b)前観測時刻で追尾が困難であると判定された場合。
【0038】
上記の何れかの条件を満たさない場合には、多重仮説追尾法による追尾処理を選択し、ステップ103の処理を行う。なお、最初の観測時刻では無条件に多重仮説追尾法による追尾処理を選択する。
【0039】
多重仮説追尾法による処理を選択した場合、まず、ステップ103において、MHT追尾処理部2は、従来の多重仮説追尾法による処理と同じ処理を実行する。その処理内容の詳細は、上述したように、非特許文献1で示されている。
【0040】
その後、ステップ104において、MHT追尾処理部2は、ある観測時刻における最良仮説に含まれる航跡について、その子孫をその観測時刻からN回の観測時刻が経過する間、全て生成し、航跡記憶部21に記憶する。また、仮説についても、仮説記憶部22に記憶する。
【0041】
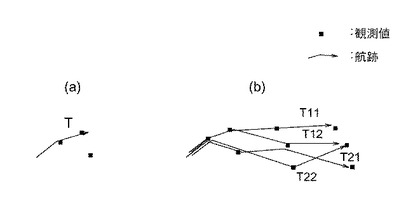
ここで、航跡、仮説の親子関係について説明する。ある観測時刻において生成された航跡Tを基にして、その後得られた何れかの観測値を用いて追尾フィルタ計算によって運動諸元推定値を更新することにより生成された航跡は全てTの子孫である。ある観測時刻の航跡Tの例を図3(a)に示す。その後、2観測時刻経過した後で得られる航跡例を図3(b)に示すが、4つの航跡のうち、T11とT12はTの子孫であり、T21とT22はTの子孫ではない。すなわち、航跡を組合せて生成する仮説については信頼度に応じて取捨選択するが、航跡については全て維持する点で、従来の多重仮説追尾法による追尾処理と異なる。
【0042】
多重仮説追尾法による追尾処理を行った場合、ステップ105において、MHT仮説監視部3は、次の観測時刻で多重仮説追尾法の追尾が困難であるか否かの判定を行う。この判定は以下の(1)〜(3)の何れかによって行う。
【0043】
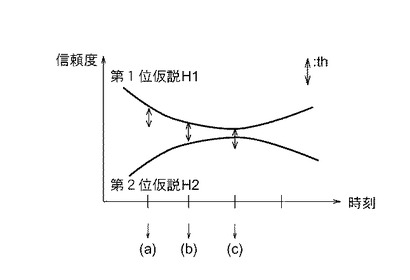
(1)MHT追尾処理部2が生成した仮説のうち、第1位の仮説H1と第2位の仮説H2の信頼度の差が閾値th以上の場合、すなわち、
【0044】
【数4】
【0045】
である場合は、多重仮説追尾法による追尾が困難でないとする。反対に、
【0046】
【数5】
【0047】
である場合には、多重仮説追尾法による追尾が困難であるとする。図4に、第1位の仮説H1と第2位の仮説H2の信頼度の推移の例を示す。観測時刻(a)、(b)では、二つの仮説の信頼度の差は閾値thを上回るため、多重仮説追尾法の追尾が困難ではないと判定される。観測時刻(c)では、二つの仮説の信頼度の差が閾値thを下回るため、多重仮説追尾法の追尾が困難であると判定される。
【0048】
(2)MHT追尾処理部2では、最終的に維持する仮説数m(自然数)を事前設定のパラメータとする場合がある。このパラメータが指定されている場合に、従来の多重仮説追尾法では、第m位の仮説Hmと第m+1位の仮説Hm+1の信頼度の差が閾値th以上の場合、すなわち、
【0049】
【数6】
【0050】
である場合には、多重仮説追尾法による追尾が困難でないとする。反対に、
【0051】
【数7】
【0052】
である場合には、多重仮説追尾法による追尾が困難であるとする。図5に、第m位の仮説Hmと第m+1位の仮説Hm+1の信頼度の推移の例を示す。観測時刻(a)、(b)では、二つの仮説の信頼度の差は閾値thを上回るため、多重仮説追尾法の追尾が困難ではないと判定される。観測時刻(c)では、二つの仮説の信頼度の差が閾値thを下回るため、多重仮説追尾法の追尾が困難であると判定される。
【0053】
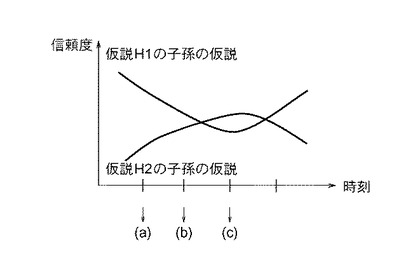
(3)MHT追尾処理部2が生成した仮説のうち、第1位と第2位の仮説の子孫の順位が前観測時刻から入れ替わったら多重仮説追尾法による追尾が困難であるとする。なお、ステップ104で航跡の親子関係について説明したが、仮説についてもその参照する航跡の親子関係に従って、親子関係を定義することができる。例えば、ある観測時刻t1における航跡T1を採択する仮説H1があり、その後の観測時刻t2において航跡T1の子孫であるT11を採択する仮説H11がある場合は、仮説H11は仮説H1の子孫である。ある観測時刻において第1位の仮説H1と第2位の仮説H2があったとし、各々の子孫の信頼度の推移の例を図6に示す。観測時刻(a)、(b)では、二つの子孫の間で信頼度の順位は入れ替わっていないため、多重仮説追尾法の追尾が困難ではないと判定される。一方、観測時刻(c)では、仮説H2の子孫の信頼度が仮説H1の子孫の信頼度を上回るため、多重仮説追尾法の追尾が困難であると判定される。
【0054】
続いて、上記のステップ102において説明した2条件(a)及び(b)を共に満たし、複数フレーム割当法による追尾処理を選択した場合について説明する。
【0055】
まず、ステップ106において、MFA追尾処理部4は、従来の複数フレーム割当法による追尾処理を実行する。この処理内容については様々な技術が適用可能であるが、上述した非特許文献2でその一例が説明されている。なお、複数フレーム割当法による追尾処理を行う場合、複数フレーム割当法で相関処理を行う最新Nフレーム分の観測値であるスライディングウィンドウの第1フレームは、観測値でなく航跡の平滑値とする必要がある。この平滑値として、前観測時刻において多重仮説追尾法による処理によって生成された最も信頼度が高い仮説に含まれる航跡のスライディングウィンドウの最初の時刻の平滑値を適用する。この第1フレームの平滑値を実現する航跡の子孫は、MHT追尾処理部2側によって全て生成されているため、MFA追尾処理部4側ではそれらの航跡を用いて、Nフレーム分の相関のコスト行列を生成する。
【0056】
次に、ステップ107において、MHT仮説設定部5は、MFA追尾処理部4が生成した相関解をMHT追尾処理部2が管理する第1位の仮説とする。また、MHT追尾処理部2が前観測時刻に生成した第1位〜第m−1位の仮説を最も単純な相関処理で延長する。ただし、MFA追尾処理部4が生成した相関解が第1位となるため、延長仮説は前観測時刻から順位を一つずつ下げ、第2位〜第m位の仮説とする。この例を図7に示す。
【0057】
この単純な相関処理による仮説の延長方法を説明する。各仮説に含まれる航跡の子孫で、かつMFA追尾処理部4が生成した航跡のうち最も尤度が高い航跡を選び、延長仮説に含める。この結果、一つの延長仮説に含まれる複数の航跡間で、使用する観測値に重複が生じた場合、尤度の高い航跡を残す。尤度の低い航跡については別の子孫の航跡を選択する。また、MFA追尾処理部4が生成した全航跡の中に、MHT追尾処理部2の仮説に含まれる航跡の子航跡が存在しない場合は、延長仮説中でメモリトラック航跡(現観測時刻において探知抜けを起こした航跡)とする。
【0058】
なお、第2位以下の仮説は全てMFA追尾処理部4で計算済みの航跡を使って構成されているため、MFA追尾処理部4が最も尤度の高い相関解を導出する限り信頼度の順位が入れ替わることはないが、第2位の仮説と同一内容となる可能性がある。また、演算時間が十分でない場合、さらに下位の仮説と同一内容となる可能性がある。そのため、後処理として、まずMFA追尾処理部4の下位とMHT追尾処理部2の仮説を比較し、一致した場合はMFA追尾処理部4の解の方を削除する。また、信頼度の上下関係が仮説の順位と一致しない場合には、仮説の順位を入れ換える。なお、複数フレーム割当法による追尾処理を選択した観測時刻の次の観測時刻では必ず多重仮説追尾法による処理を選択する。
【0059】
最終のステップ108では、航跡表示部6は、MHT追尾処理部2が管理する仮説群の中の第1位の仮説に含まれる航跡をユーザに表示する。
【0060】
以上のように、この実施の形態1によれば、多重仮説追尾法(MHT)による処理と複数フレーム割当法(MFA)による処理を使い分け、さらに多重仮説追尾法による処理における仮説の状況によって追尾の難易を判定し、追尾が困難である場合には複数フレーム割当法による処理を行うため、処理負荷の軽減と正確な相関解の導出が可能となる。
【0061】
実施の形態2.
この発明の実施の形態2に係る多目標追尾装置について図8及び図9を参照しながら説明する。図8は、この発明の実施の形態2に係る多目標追尾装置の構成を示す図である。
【0062】
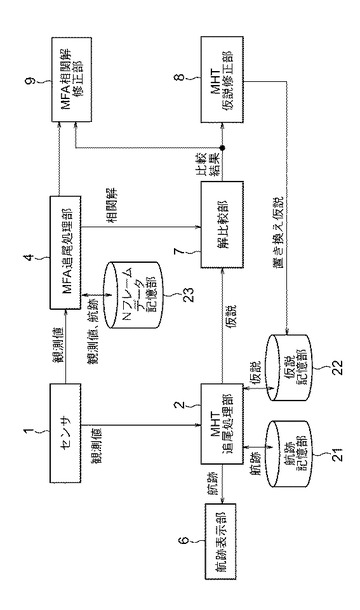
図8において、この発明の実施の形態2に係る多目標追尾装置は、センサ1と、MHT追尾処理部2と、MFA追尾処理部4と、航跡表示部6と、MHT追尾処理部2によって生成された第1位の仮説とMFA追尾処理部4によって生成された相関解の尤度を比較する解比較部7と、解比較部7による比較結果として、MFA追尾処理部4の相関解の尤度が大きい場合には、MHT追尾処理部2の第1位の仮説をMFA追尾処理部4の相関解で置き換えるMHT仮説修正部8と、解比較部7による比較結果として、MHT追尾処理部2の第1位の仮説の尤度が大きい場合には、MFA追尾処理部4の相関解をMHT追尾処理部2の第1位の仮説で置き換えるMFA相関解修正部9と、航跡記憶部21と、仮説記憶部22と、Nフレームデータ記憶部23とが設けられている。
【0063】
つぎに、この実施の形態2に係る多目標追尾装置の動作について図面を参照しながら説明する。図9は、この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。
【0064】
最初に、ステップ201において、センサ1から観測された観測値が装置に入力され、それを観測値記憶部(図示せず)に蓄積しておく。
【0065】
次に、ステップ202及び203において、多重仮説追尾法による追尾処理と、複数フレーム割当法による追尾処理を並行して実行する。
【0066】
ステップ202では、MHT追尾処理部2は、従来の多重仮説追尾法による処理と同じ処理を実行する。その処理内容の詳細は、上述したように、非特許文献1で示されている。
【0067】
また、ステップ203では、MFA追尾処理部4は、Nフレーム分の多次元相関による追尾処理を行う。この処理内容については様々な技術が適用可能であるが、上述したように、非特許文献2でその一例が示されている。
【0068】
次に、ステップ204において、解比較部7は、多重仮説追尾法による処理で生成された第1位の仮説の尤度と、複数フレーム割当法による処理で生成された相関解の尤度を比較する。
【0069】
比較した結果として、複数フレーム割当法の相関解の尤度が多重仮説追尾法の第1位の仮説の尤度を上回り、かつその差が閾値th1を上回る場合には、ステップ205へ移行する。
【0070】
ステップ205において、MHT仮説修正部8は、多重仮説追尾法の第1位の仮説を複数フレーム割当法の相関解と同一となる様に置き換えを行う。まず、MFA追尾処理部4が生成した相関解をMHT追尾処理部2が管理する第1位の仮説とする。また、MHT追尾処理部2が前観測時刻に生成した第1位〜第m−1位の仮説については順位を一つずつ下げて第2位〜第m位の仮説とするか、全てを破棄する。
【0071】
解比較部7の比較結果として、多重仮説追尾法の第1位の仮説の尤度が複数フレーム割当法の相関解の尤度を上回り、かつその差が閾値−th2を上回る場合には、ステップ206へ移行する。
【0072】
ステップ206において、MFA相関解修正部9は、MFA追尾処理部4の相関解を多重仮説追尾法の第1位の仮説と同一となる様に置き換えを行う。
【0073】
最終のステップ207において、航跡表示部6は、MHT追尾処理部2の相関解に含まれる航跡をユーザに表示する。
【0074】
以上のように、この実施の形態2によれば、多重仮説追尾法(MHT)による処理と複数フレーム割当法(MFA)による処理を並行して実行し、さらに両者が生成した仮説および相関解をその尤度の大小に応じて互いに置き換えるため、何れかの処理で追尾性能が劣化する場合においても常に正確な相関解の導出が可能となる。
【0075】
実施の形態3.
この発明の実施の形態3に係る多目標追尾装置について図10及び図11を参照しながら説明する。図10は、この発明の実施の形態3に係る多目標追尾装置の構成を示す図である。
【0076】
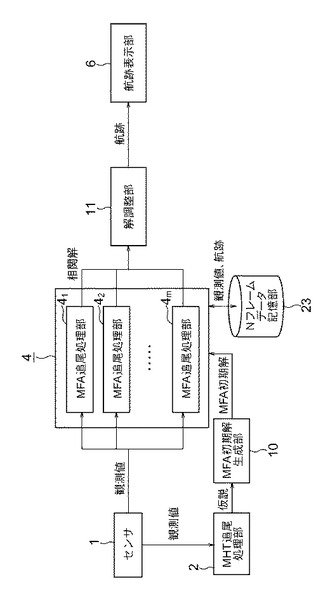
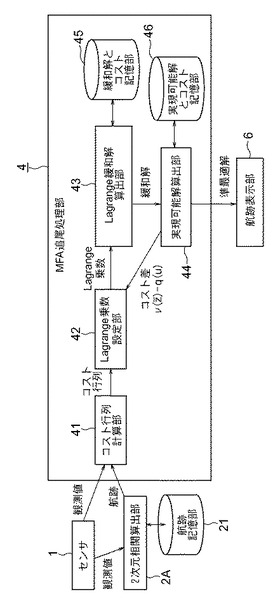
図10において、この発明の実施の形態3に係る多目標追尾装置は、センサ1と、MHT追尾処理部2と、複数のMFA追尾処理部4と、航跡表示部6と、MHT追尾処理部2によって生成された上位の複数の仮説について各仮説に含まれる航跡の平滑値を複数のMFA追尾処理部4のそれぞれの入力データの第1フレームとするMFA初期解生成部10と、複数のMFA追尾処理部4によって生成された複数の相関解の中から複数の相関解の尤度に応じて1つを選択する解調整部11と、Nフレームデータ記憶部23とが設けられている。また、MFA追尾処理部4は、m個のMFA追尾処理41,42,…,4mが設けられている。
【0077】
つぎに、この実施の形態3に係る多目標追尾装置の動作について図面を参照しながら説明する。図11は、この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。
【0078】
最初に、ステップ301において、センサ1から観測された観測値が装置に入力され、それを観測値記憶部(図示せず)に蓄積しておく。
【0079】
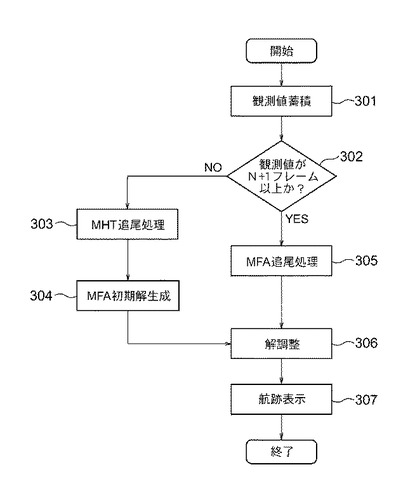
次に、ステップ302において、センサ1の初観測値時刻から最新観測時刻に到る全観測値がN+1フレーム以上か判断し、観測開始時点からNフレーム分が経過するまでは、常にステップ303へ移行し、経過している場合には、ステップ305へ移行する。
【0080】
ステップ303において、MHT追尾処理部2は、従来の多重仮説追尾法による処理と同じ処理を実行する。その処理内容の詳細は、非特許文献1で示されている。
【0081】
次に、多重仮説追尾法による追尾処理を実行した場合は、ステップ304において、MFA初期解生成部10は、MHT追尾処理部2が生成した仮説群の上位m個について、各仮説に含まれる航跡の平滑値を複数フレーム割当法による追尾処理の入力データの第1フレームとする。
【0082】
ステップ305において、MFA追尾処理部4は、Nフレーム分の多次元相関による追尾処理を行う。この処理内容については様々な技術が適用可能であるが、上述した非特許文献2でその一例が示されている。
【0083】
なお、ここでは、m個のMFA追尾処理41,42,…,4mが並行して動作する。各MFA追尾処理部に入力され相関処理の対象となるNフレーム分のデータについて、その第1フレームの内容をMHT追尾処理部2が生成したm個の仮説に含まれる航跡の平滑値とする。すなわち、各MFA追尾処理部で第1フレームの平滑値が異なり残りのフレームの観測値が共通であるNフレーム分のデータを処理することになる。よって、相関解も合計m個生成される。
【0084】
次に、ステップ306において、解調整部11は、MFA追尾処理部4によって生成されたm個の相関解のうち最も尤度の高い相関解を選択する。
【0085】
最終のステップ307において、航跡表示部6は、解調整部11によって選択された相関解に含まれる航跡をユーザに表示する。
【0086】
以上のように、この実施の形態3によれば、多重仮説追尾法(MHT)による処理によって生成された初期のm個の仮説を基に、複数の複数フレーム割当法(MFA)による処理を並行して実行し、さらに複数フレーム割当法(MFA)による処理によって生成された複数の相関解をその尤度の大小に応じて選択してユーザに表示するため、単一の複数フレーム割当法(MFA)による処理では追尾性能が劣化する場合においても正確な相関解の導出が可能となる。
【図面の簡単な説明】
【0087】
【図1】この発明の実施の形態1に係る多目標追尾装置の構成を示す図である。
【図2】この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。
【図3】ある観測時刻の航跡Tの例と、その後、2観測時刻経過した後で得られる航跡例を示す図である。
【図4】第1位の仮説H1と第2位の仮説H2の信頼度の推移の例を示す図である。
【図5】第m位の仮説Hmと第m+1位の仮説Hm+1の信頼度の推移の例を示す図である。
【図6】第1位の仮説H1の子孫と第2位の仮説H2の子孫の信頼度の推移の例を示す図である。
【図7】この発明の実施の形態1に係る多目標追尾装置の仮説置き換えの例を示す図である。
【図8】この発明の実施の形態2に係る多目標追尾装置の構成を示す図である。
【図9】この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。
【図10】この発明の実施の形態3に係る多目標追尾装置の構成を示す図である。
【図11】この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。
【図12】多目標追尾における相関を説明するための図である。
【図13】2次元相関方式における相関決定の例を示す図である。
【図14】MFA相関方式における相関決定の例を示す図である。
【図15】2次元(2観測時刻)の観測値と対応するコスト行列の例を示す図である。
【図16】コスト行列から得られる解の例と対応する航跡の構成を示す図である。
【図17】制約条件を満たさない相関決定の例を示す図である。
【図18】複数フレーム割当法による従来の多目標追尾装置の構成を示す図である。
【図19】複数フレーム割当法による従来の多目標追尾装置の動作を示すフローチャートである。
【図20】複数フレーム割当法による追尾方式と2次元相関による追尾方式を併用する従来の多目標追尾装置の構成を示す図である。
【符号の説明】
【0088】
1 センサ、2 MHT追尾処理部、3 MHT仮説監視部、4 MFA追尾処理部、5 MHT仮説設定部、6 航跡表示部、7 解比較部、8 MHT仮説修正部、9 MFA相関解修正部、10 MFA初期解生成部、11 解調整部、21 航跡記憶部、22 仮説記憶部、23 Nフレームデータ記憶部。
【技術分野】
【0001】
この発明は、レーダ等のセンサシステムにおいて、目標位置を観測するセンサから得られる観測値を使って航跡を生成する追尾技術に関し、特に、この追尾に関して相関の問題を多次元的に解く技術において、演算時間を削減し、かつ良好の追尾性能を実現するための相関解を導出する多目標追尾装置に関するものである。
【背景技術】
【0002】
現在、センサにより目標を観測して得られた観測値を使って目標を追尾する技術については既に多くの論文、特許等の文献で取り挙げられており、その装置および方法については様々な提案がなされている。
【0003】
近接多目標を追尾する場合や、クラッタ等の不要信号環境下で目標を追尾する場合、相関の決定方法は追尾性能を左右する重要な部分である。相関とは、図12に示す様な、各観測時刻で複数の観測値が得られた場合、「観測時刻t1から観測時刻t3に至るどの観測値を同じ目標と見なすか」を示すものである。
【0004】
この相関決定の方式としては、図13に示す様に、各観測時刻毎に航跡を生成し、1観測時刻前の航跡と最新観測時刻の観測値の対応付けを行う方式が用いられてきた。この航跡と観測値の2次元の相関を決定する方法については様々なものがあるが、一つの例としては、各々の既存航跡に対して可能な相関全てを考慮して仮説を構成し、各々の相関の尤もらしさを基に仮説の信頼度を計算する多重仮説追尾法(MHT:Multiple Hypothesis Tracking)がある(例えば、非特許文献1参照)。
【0005】
上記の技術は既存の航跡と最新の観測値の割り当てを決定する方式であるが、さらなる相関性能の向上を目指し、図14の様に、複数観測時刻に跨る観測値の相関をまとめて計算して航跡を生成するアルゴリズムとして複数フレーム割当法(MFA:Multiple Frame Assignment)がある(例えば、非特許文献2参照)。なお、ここでフレームとは、1観測時刻において得られた観測値の集合である。
【0006】
この複数フレーム割当法では、N(自然数)観測時刻に跨る観測値の相関決定をN次元の割り当て問題に変換して解く。定式化された割り当て問題を以下に示す。
【0007】
【数1】
【0008】
ここで、コスト行列ci1,…,iNは、観測値i1,…,iNから航跡を生成するのにかかるコストであり、通常、航跡尤度比の逆数を使用する。
【0009】
【数2】
【0010】
上記の割り当て問題は、コスト行列の各次元から要素を一つずつ選択して、選択した要素を最小にするという問題である。簡単な例として、N=2の場合の観測値と対応するコスト行列の例を図15に示す。このコスト行列から得られる解の例と対応する航跡の構成を図16に示す。この解によるコストは、「1」が設定された部分に対応するコスト行列の要素の和をとって、c11+c24+c32+c43となる。また、制約条件は、「1」と設定される要素の列が重複してはならないことを示す。例えば、図17の様な、相関決定は、第2観測時刻における第2要素に重複して「1」が設定されており、制約条件を満たさない。これは追尾において、1つの観測値を重複して使用していることに相当する。
【0011】
以上に説明したN次元の割り当てで実現可能な(制約条件を満たす)解の数は、観測値の数に応じて指数的に増加する。そのため、コストを最小とする最適解を得るためには、処理時間が観測値の数や処理する次元数Nに応じて指数的に増加するという問題がある。これを解決するために、上記の非特許文献2で示されている方式ではラグランジェ(Lagrange)緩和法を使って、N次元の割り当て問題を2次元に緩和しながら準最適な解を得る。
【0012】
非特許文献2で示された従来の複数フレーム割当法による多目標追尾装置について図18及び図19を参照しながら説明する。図18は、複数フレーム割当法による従来の多目標追尾装置の構成を示す図である。また、図19は、複数フレーム割当法による従来の多目標追尾装置の動作を示すフローチャートである。
【0013】
図17において、従来の複数フレーム割当法による多目標追尾装置は、目標位置を観測するセンサ1と、MFA追尾処理部4と、航跡表示部6とが設けられている。また、MFA追尾処理部4は、コスト行列計算部41と、Lagrange乗数設定部42と、Lagrange緩和解算出部43と、実現可能解算出部44と、緩和解とコスト記憶部45と、実現可能解とコスト記憶部46とが設けられている。
【0014】
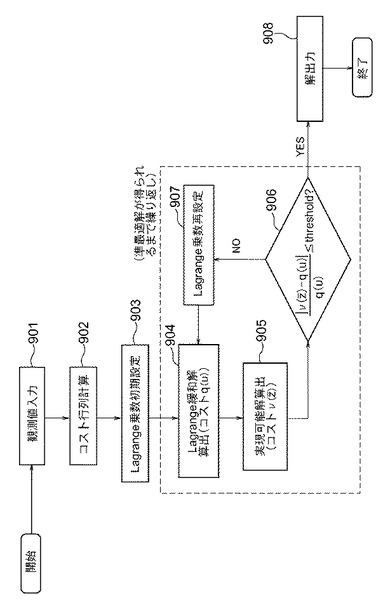
まず、ステップ901において、コスト行列計算部41は、センサ1から得られた過去から最新までのN観測時刻分の観測値を入力する。
【0015】
次に、ステップ902において、コスト行列計算部41は、各観測時刻から一つずつ観測値を選択し、その観測値の組み合わせによって形成される航跡の尤度比を計算し、その逆数を使ってコスト行列を計算する。
【0016】
次に、ステップ903において、Lagrange乗数設定部42は、制約条件を緩和するためのラグランジェ乗数の設定を行う。このラグランジェ乗数は、第3観測時刻から第N観測時刻に至る観測値全てについて設定される。
【0017】
観測値jrに関するラグランジェ乗数をujrとする。このラグランジェ乗数を設定することにより、N次元のコスト行列の第1次元〜第N次元の観測値に関する制約を2次元に緩和することができる。この緩和によりコスト関数は2次元のコスト行列に変形され、その要素は以下の式で表せる。
【0018】
【数3】
【0019】
このステップ903における処理の一例として、初期のラグランジェ乗数を全て0に設定する。
【0020】
次に、ステップ904おいて、Lagrange緩和解算出部43は、乗数によって緩和された2次元の割り当て問題の解を算出する。この2次元解の算出方法は、ハンガリー法等の高速な解導出方式があり、そのうちの何れかを使用する。導出された緩和解のコストをq(u)とし、緩和解とコスト記憶部45に記憶する。
【0021】
次に、ステップ905において、実現可能解算出部44は、上記の緩和解を修正して、全ての制約条件を満たす実現可能解を導出する。導出された実現可能解のコストをν(オーバーラインz)とし、実現可能解とコスト記憶部46に記憶する。なお、オーバーラインzは、zの上に−があることを表す。
【0022】
次に、ステップ906において、実現可能解算出部44は、ラグランジェ緩和解のコストq(u)と実現可能解のコストν(オーバーラインz)の差をq(u)で割った値を算出し、それがあらかじめ設定した閾値パラメータ以下であったら、ステップ908へ進む。また、閾値条件を満たさない場合は、ステップ907へ進む。
【0023】
ステップ907において、閾値条件を満たさない場合には、Lagrange乗数設定部42は、ラグランジェ乗数の再設定を行う。この再設定では、最新の緩和解における制約条件の逸脱具合に応じた乗数設定を行う。
【0024】
このラグランジェ乗数再設定ステップ907を実行した場合は、以降、ラグランジェ緩和解算出ステップ904と、実現可能解算出ステップ905が、閾値条件を満たすまで繰り返される。
【0025】
ステップ908において、航跡表示部6は、実現可能解をこのN次元割り当て問題の準最適解として出力する。
【0026】
上記の複数フレーム割当法MFAは、相関性能が高いものの、演算負荷が重いという問題があった。この問題を解決するために、複数フレーム割当法による追尾方式と2次元相関による追尾方式を併用する技術が提案されている(例えば、特許文献1参照)。
【0027】
図20は、この併用技術の構成を示す図である。この併用技術では、観測時刻を観測間隔で割った値(処理回数)があらかじめパラメータとして設定されていた値nの倍数である場合には複数フレーム割り当て処理を行い、そうでない場合には2次元相関算出処理を行う。
【0028】
【特許文献1】特開2007−212244号公報
【非特許文献1】Donald B. Reid “An Algorithm for Tracking Multiple Targets”(IEEE Transactions on Automatic Control, Vol.AC-24, No6, December,1979)
【非特許文献2】A. B. Poore and A. J. Robertson III “A New Multi-dimensional Data Association Algorithm for Multisensor-Multitarget Tracking”(Proc. Of SPIE vol.2561,1995)
【発明の開示】
【発明が解決しようとする課題】
【0029】
追尾における相関処理は、センサの探知状況が良好で周囲に他の目標や不要信号が存在しない場合は正解を導くのが容易であるが、目標の探知抜けが起きたり、周囲に不要信号が発生したりする場合には困難となる。容易な場合には従来の2次元相関による追尾方式で十分であり、困難な場合にはMFA追尾方式を適用した方が、一般に正解が得られる確率が高い。よって、追尾が容易な場合に2次元相関を適用し、困難な場合にMFA追尾処理を適用する切り替え方式が理想的である。しかし、上記の特許文献1の従来技術は、二つの追尾アルゴリズムの切り替え時期が固定的であり、追尾の難易度によってアルゴリズムの切り替えを行うことができないという問題点があった。
【0030】
この発明は、上述のような課題を解決するためになされたもので、その目的は、追尾の難易度に応じてアルゴリズムの切り換えを行うことができ、演算負荷の削減と正確な相関解の導出を両立させることができる多目標追尾装置を得るものである。
【課題を解決するための手段】
【0031】
この発明に係る多目標追尾装置は、前観測時刻で多重仮説追尾法による追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合には、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、前記第1及び第2の条件の何れかの条件を満たさない場合には、センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、前記MHT追尾処理部による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部と、前記MFA追尾処理部で生成された相関解を前記MHT追尾処理部の仮説として置き換えるMHT仮説設定部とを設けたものである。
【発明の効果】
【0032】
この発明に係る多目標追尾装置は、追尾の難易度に応じてアルゴリズムの切り換えを行うことができ、演算負荷の削減と正確な相関解の導出を両立させることができるという効果を奏する。
【発明を実施するための最良の形態】
【0033】
実施の形態1.
この発明の実施の形態1に係る多目標追尾装置について図1から図7までを参照しながら説明する。図1は、この発明の実施の形態1に係る多目標追尾装置の構成を示す図である。なお、各図中、同一符号は同一又は相当部分を示す。
【0034】
図1において、この発明の実施の形態1に係る多目標追尾装置は、目標位置を観測するセンサ1と、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理部2による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部4と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5と、航跡をユーザに表示する航跡表示部6と、航跡を記憶する航跡記憶部21と、仮説を記憶する仮説記憶部22と、Nフレーム分の観測値、航跡を記憶するNフレームデータ記憶部23とが設けられている。
【0035】
つぎに、この実施の形態1に係る多目標追尾装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。
【0036】
最初に、ステップ101において、センサ1から観測された観測値が装置に入力され、それを観測値記憶部(図示せず)に蓄積しておく。
【0037】
次に、ステップ102において、以下の条件(a)及び(b)を共に満たす場合には、複数フレーム割当法(MFA)による追尾処理を選択し、ステップ106に移行する。
(a)前観測時刻で多重仮説追尾法(MHT)による追尾処理が実行された場合。
(b)前観測時刻で追尾が困難であると判定された場合。
【0038】
上記の何れかの条件を満たさない場合には、多重仮説追尾法による追尾処理を選択し、ステップ103の処理を行う。なお、最初の観測時刻では無条件に多重仮説追尾法による追尾処理を選択する。
【0039】
多重仮説追尾法による処理を選択した場合、まず、ステップ103において、MHT追尾処理部2は、従来の多重仮説追尾法による処理と同じ処理を実行する。その処理内容の詳細は、上述したように、非特許文献1で示されている。
【0040】
その後、ステップ104において、MHT追尾処理部2は、ある観測時刻における最良仮説に含まれる航跡について、その子孫をその観測時刻からN回の観測時刻が経過する間、全て生成し、航跡記憶部21に記憶する。また、仮説についても、仮説記憶部22に記憶する。
【0041】
ここで、航跡、仮説の親子関係について説明する。ある観測時刻において生成された航跡Tを基にして、その後得られた何れかの観測値を用いて追尾フィルタ計算によって運動諸元推定値を更新することにより生成された航跡は全てTの子孫である。ある観測時刻の航跡Tの例を図3(a)に示す。その後、2観測時刻経過した後で得られる航跡例を図3(b)に示すが、4つの航跡のうち、T11とT12はTの子孫であり、T21とT22はTの子孫ではない。すなわち、航跡を組合せて生成する仮説については信頼度に応じて取捨選択するが、航跡については全て維持する点で、従来の多重仮説追尾法による追尾処理と異なる。
【0042】
多重仮説追尾法による追尾処理を行った場合、ステップ105において、MHT仮説監視部3は、次の観測時刻で多重仮説追尾法の追尾が困難であるか否かの判定を行う。この判定は以下の(1)〜(3)の何れかによって行う。
【0043】
(1)MHT追尾処理部2が生成した仮説のうち、第1位の仮説H1と第2位の仮説H2の信頼度の差が閾値th以上の場合、すなわち、
【0044】
【数4】
【0045】
である場合は、多重仮説追尾法による追尾が困難でないとする。反対に、
【0046】
【数5】
【0047】
である場合には、多重仮説追尾法による追尾が困難であるとする。図4に、第1位の仮説H1と第2位の仮説H2の信頼度の推移の例を示す。観測時刻(a)、(b)では、二つの仮説の信頼度の差は閾値thを上回るため、多重仮説追尾法の追尾が困難ではないと判定される。観測時刻(c)では、二つの仮説の信頼度の差が閾値thを下回るため、多重仮説追尾法の追尾が困難であると判定される。
【0048】
(2)MHT追尾処理部2では、最終的に維持する仮説数m(自然数)を事前設定のパラメータとする場合がある。このパラメータが指定されている場合に、従来の多重仮説追尾法では、第m位の仮説Hmと第m+1位の仮説Hm+1の信頼度の差が閾値th以上の場合、すなわち、
【0049】
【数6】
【0050】
である場合には、多重仮説追尾法による追尾が困難でないとする。反対に、
【0051】
【数7】
【0052】
である場合には、多重仮説追尾法による追尾が困難であるとする。図5に、第m位の仮説Hmと第m+1位の仮説Hm+1の信頼度の推移の例を示す。観測時刻(a)、(b)では、二つの仮説の信頼度の差は閾値thを上回るため、多重仮説追尾法の追尾が困難ではないと判定される。観測時刻(c)では、二つの仮説の信頼度の差が閾値thを下回るため、多重仮説追尾法の追尾が困難であると判定される。
【0053】
(3)MHT追尾処理部2が生成した仮説のうち、第1位と第2位の仮説の子孫の順位が前観測時刻から入れ替わったら多重仮説追尾法による追尾が困難であるとする。なお、ステップ104で航跡の親子関係について説明したが、仮説についてもその参照する航跡の親子関係に従って、親子関係を定義することができる。例えば、ある観測時刻t1における航跡T1を採択する仮説H1があり、その後の観測時刻t2において航跡T1の子孫であるT11を採択する仮説H11がある場合は、仮説H11は仮説H1の子孫である。ある観測時刻において第1位の仮説H1と第2位の仮説H2があったとし、各々の子孫の信頼度の推移の例を図6に示す。観測時刻(a)、(b)では、二つの子孫の間で信頼度の順位は入れ替わっていないため、多重仮説追尾法の追尾が困難ではないと判定される。一方、観測時刻(c)では、仮説H2の子孫の信頼度が仮説H1の子孫の信頼度を上回るため、多重仮説追尾法の追尾が困難であると判定される。
【0054】
続いて、上記のステップ102において説明した2条件(a)及び(b)を共に満たし、複数フレーム割当法による追尾処理を選択した場合について説明する。
【0055】
まず、ステップ106において、MFA追尾処理部4は、従来の複数フレーム割当法による追尾処理を実行する。この処理内容については様々な技術が適用可能であるが、上述した非特許文献2でその一例が説明されている。なお、複数フレーム割当法による追尾処理を行う場合、複数フレーム割当法で相関処理を行う最新Nフレーム分の観測値であるスライディングウィンドウの第1フレームは、観測値でなく航跡の平滑値とする必要がある。この平滑値として、前観測時刻において多重仮説追尾法による処理によって生成された最も信頼度が高い仮説に含まれる航跡のスライディングウィンドウの最初の時刻の平滑値を適用する。この第1フレームの平滑値を実現する航跡の子孫は、MHT追尾処理部2側によって全て生成されているため、MFA追尾処理部4側ではそれらの航跡を用いて、Nフレーム分の相関のコスト行列を生成する。
【0056】
次に、ステップ107において、MHT仮説設定部5は、MFA追尾処理部4が生成した相関解をMHT追尾処理部2が管理する第1位の仮説とする。また、MHT追尾処理部2が前観測時刻に生成した第1位〜第m−1位の仮説を最も単純な相関処理で延長する。ただし、MFA追尾処理部4が生成した相関解が第1位となるため、延長仮説は前観測時刻から順位を一つずつ下げ、第2位〜第m位の仮説とする。この例を図7に示す。
【0057】
この単純な相関処理による仮説の延長方法を説明する。各仮説に含まれる航跡の子孫で、かつMFA追尾処理部4が生成した航跡のうち最も尤度が高い航跡を選び、延長仮説に含める。この結果、一つの延長仮説に含まれる複数の航跡間で、使用する観測値に重複が生じた場合、尤度の高い航跡を残す。尤度の低い航跡については別の子孫の航跡を選択する。また、MFA追尾処理部4が生成した全航跡の中に、MHT追尾処理部2の仮説に含まれる航跡の子航跡が存在しない場合は、延長仮説中でメモリトラック航跡(現観測時刻において探知抜けを起こした航跡)とする。
【0058】
なお、第2位以下の仮説は全てMFA追尾処理部4で計算済みの航跡を使って構成されているため、MFA追尾処理部4が最も尤度の高い相関解を導出する限り信頼度の順位が入れ替わることはないが、第2位の仮説と同一内容となる可能性がある。また、演算時間が十分でない場合、さらに下位の仮説と同一内容となる可能性がある。そのため、後処理として、まずMFA追尾処理部4の下位とMHT追尾処理部2の仮説を比較し、一致した場合はMFA追尾処理部4の解の方を削除する。また、信頼度の上下関係が仮説の順位と一致しない場合には、仮説の順位を入れ換える。なお、複数フレーム割当法による追尾処理を選択した観測時刻の次の観測時刻では必ず多重仮説追尾法による処理を選択する。
【0059】
最終のステップ108では、航跡表示部6は、MHT追尾処理部2が管理する仮説群の中の第1位の仮説に含まれる航跡をユーザに表示する。
【0060】
以上のように、この実施の形態1によれば、多重仮説追尾法(MHT)による処理と複数フレーム割当法(MFA)による処理を使い分け、さらに多重仮説追尾法による処理における仮説の状況によって追尾の難易を判定し、追尾が困難である場合には複数フレーム割当法による処理を行うため、処理負荷の軽減と正確な相関解の導出が可能となる。
【0061】
実施の形態2.
この発明の実施の形態2に係る多目標追尾装置について図8及び図9を参照しながら説明する。図8は、この発明の実施の形態2に係る多目標追尾装置の構成を示す図である。
【0062】
図8において、この発明の実施の形態2に係る多目標追尾装置は、センサ1と、MHT追尾処理部2と、MFA追尾処理部4と、航跡表示部6と、MHT追尾処理部2によって生成された第1位の仮説とMFA追尾処理部4によって生成された相関解の尤度を比較する解比較部7と、解比較部7による比較結果として、MFA追尾処理部4の相関解の尤度が大きい場合には、MHT追尾処理部2の第1位の仮説をMFA追尾処理部4の相関解で置き換えるMHT仮説修正部8と、解比較部7による比較結果として、MHT追尾処理部2の第1位の仮説の尤度が大きい場合には、MFA追尾処理部4の相関解をMHT追尾処理部2の第1位の仮説で置き換えるMFA相関解修正部9と、航跡記憶部21と、仮説記憶部22と、Nフレームデータ記憶部23とが設けられている。
【0063】
つぎに、この実施の形態2に係る多目標追尾装置の動作について図面を参照しながら説明する。図9は、この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。
【0064】
最初に、ステップ201において、センサ1から観測された観測値が装置に入力され、それを観測値記憶部(図示せず)に蓄積しておく。
【0065】
次に、ステップ202及び203において、多重仮説追尾法による追尾処理と、複数フレーム割当法による追尾処理を並行して実行する。
【0066】
ステップ202では、MHT追尾処理部2は、従来の多重仮説追尾法による処理と同じ処理を実行する。その処理内容の詳細は、上述したように、非特許文献1で示されている。
【0067】
また、ステップ203では、MFA追尾処理部4は、Nフレーム分の多次元相関による追尾処理を行う。この処理内容については様々な技術が適用可能であるが、上述したように、非特許文献2でその一例が示されている。
【0068】
次に、ステップ204において、解比較部7は、多重仮説追尾法による処理で生成された第1位の仮説の尤度と、複数フレーム割当法による処理で生成された相関解の尤度を比較する。
【0069】
比較した結果として、複数フレーム割当法の相関解の尤度が多重仮説追尾法の第1位の仮説の尤度を上回り、かつその差が閾値th1を上回る場合には、ステップ205へ移行する。
【0070】
ステップ205において、MHT仮説修正部8は、多重仮説追尾法の第1位の仮説を複数フレーム割当法の相関解と同一となる様に置き換えを行う。まず、MFA追尾処理部4が生成した相関解をMHT追尾処理部2が管理する第1位の仮説とする。また、MHT追尾処理部2が前観測時刻に生成した第1位〜第m−1位の仮説については順位を一つずつ下げて第2位〜第m位の仮説とするか、全てを破棄する。
【0071】
解比較部7の比較結果として、多重仮説追尾法の第1位の仮説の尤度が複数フレーム割当法の相関解の尤度を上回り、かつその差が閾値−th2を上回る場合には、ステップ206へ移行する。
【0072】
ステップ206において、MFA相関解修正部9は、MFA追尾処理部4の相関解を多重仮説追尾法の第1位の仮説と同一となる様に置き換えを行う。
【0073】
最終のステップ207において、航跡表示部6は、MHT追尾処理部2の相関解に含まれる航跡をユーザに表示する。
【0074】
以上のように、この実施の形態2によれば、多重仮説追尾法(MHT)による処理と複数フレーム割当法(MFA)による処理を並行して実行し、さらに両者が生成した仮説および相関解をその尤度の大小に応じて互いに置き換えるため、何れかの処理で追尾性能が劣化する場合においても常に正確な相関解の導出が可能となる。
【0075】
実施の形態3.
この発明の実施の形態3に係る多目標追尾装置について図10及び図11を参照しながら説明する。図10は、この発明の実施の形態3に係る多目標追尾装置の構成を示す図である。
【0076】
図10において、この発明の実施の形態3に係る多目標追尾装置は、センサ1と、MHT追尾処理部2と、複数のMFA追尾処理部4と、航跡表示部6と、MHT追尾処理部2によって生成された上位の複数の仮説について各仮説に含まれる航跡の平滑値を複数のMFA追尾処理部4のそれぞれの入力データの第1フレームとするMFA初期解生成部10と、複数のMFA追尾処理部4によって生成された複数の相関解の中から複数の相関解の尤度に応じて1つを選択する解調整部11と、Nフレームデータ記憶部23とが設けられている。また、MFA追尾処理部4は、m個のMFA追尾処理41,42,…,4mが設けられている。
【0077】
つぎに、この実施の形態3に係る多目標追尾装置の動作について図面を参照しながら説明する。図11は、この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。
【0078】
最初に、ステップ301において、センサ1から観測された観測値が装置に入力され、それを観測値記憶部(図示せず)に蓄積しておく。
【0079】
次に、ステップ302において、センサ1の初観測値時刻から最新観測時刻に到る全観測値がN+1フレーム以上か判断し、観測開始時点からNフレーム分が経過するまでは、常にステップ303へ移行し、経過している場合には、ステップ305へ移行する。
【0080】
ステップ303において、MHT追尾処理部2は、従来の多重仮説追尾法による処理と同じ処理を実行する。その処理内容の詳細は、非特許文献1で示されている。
【0081】
次に、多重仮説追尾法による追尾処理を実行した場合は、ステップ304において、MFA初期解生成部10は、MHT追尾処理部2が生成した仮説群の上位m個について、各仮説に含まれる航跡の平滑値を複数フレーム割当法による追尾処理の入力データの第1フレームとする。
【0082】
ステップ305において、MFA追尾処理部4は、Nフレーム分の多次元相関による追尾処理を行う。この処理内容については様々な技術が適用可能であるが、上述した非特許文献2でその一例が示されている。
【0083】
なお、ここでは、m個のMFA追尾処理41,42,…,4mが並行して動作する。各MFA追尾処理部に入力され相関処理の対象となるNフレーム分のデータについて、その第1フレームの内容をMHT追尾処理部2が生成したm個の仮説に含まれる航跡の平滑値とする。すなわち、各MFA追尾処理部で第1フレームの平滑値が異なり残りのフレームの観測値が共通であるNフレーム分のデータを処理することになる。よって、相関解も合計m個生成される。
【0084】
次に、ステップ306において、解調整部11は、MFA追尾処理部4によって生成されたm個の相関解のうち最も尤度の高い相関解を選択する。
【0085】
最終のステップ307において、航跡表示部6は、解調整部11によって選択された相関解に含まれる航跡をユーザに表示する。
【0086】
以上のように、この実施の形態3によれば、多重仮説追尾法(MHT)による処理によって生成された初期のm個の仮説を基に、複数の複数フレーム割当法(MFA)による処理を並行して実行し、さらに複数フレーム割当法(MFA)による処理によって生成された複数の相関解をその尤度の大小に応じて選択してユーザに表示するため、単一の複数フレーム割当法(MFA)による処理では追尾性能が劣化する場合においても正確な相関解の導出が可能となる。
【図面の簡単な説明】
【0087】
【図1】この発明の実施の形態1に係る多目標追尾装置の構成を示す図である。
【図2】この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。
【図3】ある観測時刻の航跡Tの例と、その後、2観測時刻経過した後で得られる航跡例を示す図である。
【図4】第1位の仮説H1と第2位の仮説H2の信頼度の推移の例を示す図である。
【図5】第m位の仮説Hmと第m+1位の仮説Hm+1の信頼度の推移の例を示す図である。
【図6】第1位の仮説H1の子孫と第2位の仮説H2の子孫の信頼度の推移の例を示す図である。
【図7】この発明の実施の形態1に係る多目標追尾装置の仮説置き換えの例を示す図である。
【図8】この発明の実施の形態2に係る多目標追尾装置の構成を示す図である。
【図9】この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。
【図10】この発明の実施の形態3に係る多目標追尾装置の構成を示す図である。
【図11】この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。
【図12】多目標追尾における相関を説明するための図である。
【図13】2次元相関方式における相関決定の例を示す図である。
【図14】MFA相関方式における相関決定の例を示す図である。
【図15】2次元(2観測時刻)の観測値と対応するコスト行列の例を示す図である。
【図16】コスト行列から得られる解の例と対応する航跡の構成を示す図である。
【図17】制約条件を満たさない相関決定の例を示す図である。
【図18】複数フレーム割当法による従来の多目標追尾装置の構成を示す図である。
【図19】複数フレーム割当法による従来の多目標追尾装置の動作を示すフローチャートである。
【図20】複数フレーム割当法による追尾方式と2次元相関による追尾方式を併用する従来の多目標追尾装置の構成を示す図である。
【符号の説明】
【0088】
1 センサ、2 MHT追尾処理部、3 MHT仮説監視部、4 MFA追尾処理部、5 MHT仮説設定部、6 航跡表示部、7 解比較部、8 MHT仮説修正部、9 MFA相関解修正部、10 MFA初期解生成部、11 解調整部、21 航跡記憶部、22 仮説記憶部、23 Nフレームデータ記憶部。
【特許請求の範囲】
【請求項1】
前観測時刻で多重仮説追尾法による追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合には、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、
前記第1及び第2の条件の何れかの条件を満たさない場合には、センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
前記MHT追尾処理部による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部と、
前記MFA追尾処理部で生成された相関解を前記MHT追尾処理部の仮説として置き換えるMHT仮説設定部と
を備えたことを特徴とする多目標追尾装置。
【請求項2】
前記MHT仮説監視部は、前記MHT追尾処理部が生成した第1位の仮説と第2位の仮説の信頼度の差によって追尾が困難であるかどうかを判定する
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項3】
前記MHT仮説監視部は、前記MHT追尾処理部の仮説選択方法が信頼度に応じた上位m(自然数)個の仮説を残すという方法を採用していることを前提として、前記MHT追尾処理部が生成した第m位の仮説と第m+1位の仮説の信頼度の差によって追尾が困難であるかどうかを判定する
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項4】
前記MHT仮説監視部は、前記MHT追尾処理部が生成したある観測時刻における第1位の仮説と第2位の仮説の子孫の仮説の順位の変動の有無によって追尾が困難であるかどうかを判定する
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項5】
センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
前記MHT追尾処理部と並行して、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、
前記MHT追尾処理部によって生成された第1位の仮説と前記MFA追尾処理部によって生成された相関解の尤度を比較する解比較部と、
前記解比較部による比較結果として、前記MFA追尾処理部の相関解の尤度が大きい場合には、前記MHT追尾処理部の第1位の仮説を前記MFA追尾処理部の相関解で置き換えるMHT仮説修正部と、
前記解比較部による比較結果として、前記MHT追尾処理部の第1位の仮説の尤度が大きい場合には、前記MFA追尾処理部の相関解を前記MHT追尾処理部の第1位の仮説で置き換えるMFA相関解修正部と
を備えたことを特徴とする多目標追尾装置。
【請求項6】
センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解をそれぞれ生成する複数のMFA追尾処理部と、
前記MHT追尾処理部によって生成された上位の複数の仮説について各仮説に含まれる航跡の平滑値を前記複数のMFA追尾処理部のそれぞれの入力データの第1フレームとするMFA初期解生成部と、
前記複数のMFA追尾処理部によって生成された複数の相関解の中から前記複数の相関解の尤度に応じて1つを選択する解調整部と
を備えたことを特徴とする多目標追尾装置。
【請求項7】
センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
前記MHT追尾処理部による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部とを備え、
前記MHT仮説監視部により追尾が困難でないと判断された場合には、前記MHT追尾処理部による処理を継続する
ことを特徴とする多目標追尾装置。
【請求項8】
前観測時刻で多重仮説追尾法による追尾処理を実行する第1の条件、及び前観測時刻で前記MHT仮説監視部により追尾が困難であると判定される第2の条件を満たす場合には、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、
前記MFA追尾処理部で生成された相関解を前記MHT追尾処理部の仮説として置き換えるMHT仮説設定部とをさらに備えた
ことを特徴とする請求項7記載の多目標追尾装置。
【請求項1】
前観測時刻で多重仮説追尾法による追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合には、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、
前記第1及び第2の条件の何れかの条件を満たさない場合には、センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
前記MHT追尾処理部による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部と、
前記MFA追尾処理部で生成された相関解を前記MHT追尾処理部の仮説として置き換えるMHT仮説設定部と
を備えたことを特徴とする多目標追尾装置。
【請求項2】
前記MHT仮説監視部は、前記MHT追尾処理部が生成した第1位の仮説と第2位の仮説の信頼度の差によって追尾が困難であるかどうかを判定する
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項3】
前記MHT仮説監視部は、前記MHT追尾処理部の仮説選択方法が信頼度に応じた上位m(自然数)個の仮説を残すという方法を採用していることを前提として、前記MHT追尾処理部が生成した第m位の仮説と第m+1位の仮説の信頼度の差によって追尾が困難であるかどうかを判定する
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項4】
前記MHT仮説監視部は、前記MHT追尾処理部が生成したある観測時刻における第1位の仮説と第2位の仮説の子孫の仮説の順位の変動の有無によって追尾が困難であるかどうかを判定する
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項5】
センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
前記MHT追尾処理部と並行して、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、
前記MHT追尾処理部によって生成された第1位の仮説と前記MFA追尾処理部によって生成された相関解の尤度を比較する解比較部と、
前記解比較部による比較結果として、前記MFA追尾処理部の相関解の尤度が大きい場合には、前記MHT追尾処理部の第1位の仮説を前記MFA追尾処理部の相関解で置き換えるMHT仮説修正部と、
前記解比較部による比較結果として、前記MHT追尾処理部の第1位の仮説の尤度が大きい場合には、前記MFA追尾処理部の相関解を前記MHT追尾処理部の第1位の仮説で置き換えるMFA相関解修正部と
を備えたことを特徴とする多目標追尾装置。
【請求項6】
センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解をそれぞれ生成する複数のMFA追尾処理部と、
前記MHT追尾処理部によって生成された上位の複数の仮説について各仮説に含まれる航跡の平滑値を前記複数のMFA追尾処理部のそれぞれの入力データの第1フレームとするMFA初期解生成部と、
前記複数のMFA追尾処理部によって生成された複数の相関解の中から前記複数の相関解の尤度に応じて1つを選択する解調整部と
を備えたことを特徴とする多目標追尾装置。
【請求項7】
センサからの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部と、
前記MHT追尾処理部による追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部とを備え、
前記MHT仮説監視部により追尾が困難でないと判断された場合には、前記MHT追尾処理部による処理を継続する
ことを特徴とする多目標追尾装置。
【請求項8】
前観測時刻で多重仮説追尾法による追尾処理を実行する第1の条件、及び前観測時刻で前記MHT仮説監視部により追尾が困難であると判定される第2の条件を満たす場合には、センサからの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、複数フレーム割当法による処理で相関解を生成するMFA追尾処理部と、
前記MFA追尾処理部で生成された相関解を前記MHT追尾処理部の仮説として置き換えるMHT仮説設定部とをさらに備えた
ことを特徴とする請求項7記載の多目標追尾装置。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】

【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2009−281865(P2009−281865A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2008−134327(P2008−134327)
【出願日】平成20年5月22日(2008.5.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願日】平成20年5月22日(2008.5.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]