
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
1 - 20 / 636
車載機器制御システム
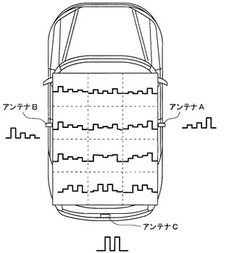
【課題】携帯機の位置特定の精度を向上するとともに、携帯機の位置特定に要する時間を短縮する。
【解決手段】車載装置1は、車両に配置されたアンテナA〜Cから、互いに異なるアンテナ識別用パターンを含むデータ信号を互いに異なる拡散符号で直接スペクトル拡散処理した信号を、互いに異なるパターンに従って電波の強度を段階的に変化させて同一期間中に送出させる。携帯機2は、受信した信号に逆スペクトル拡散処理を施して各データ信号に含まれるアンテナ識別用パターンを抽出し、抽出したアンテナ識別用パターンを用いて車両における携帯機の位置を特定し、車載装置へ送出する。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法

【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
レーダ画像処理装置
【課題】簡便な方法で目標候補領域と目標モデルとの比較を行うレーダ画像処理装置を得る。
【解決手段】領域判定処理部6が、領域形成処理部5が生成した目標候補領域に外接する外接領域を設定する領域設定処理部7と、領域設定処理部7が設定した外接領域の形状およびサイズから、レーダによる目標候補領域の観測方向を算出し、算出した観測方向から目標物を観測した場合の3次元形状と、目標候補領域の3次元形状とを比較し、目標候補領域が目標物であるか判定する目標判定処理部9とを備える。
(もっと読む)
レーダ装置
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
(もっと読む)
画像生成装置
【課題】残像が消えるまでの時定数が異なるような複数のオブジェクトを描画する場合でもメモリの使用量を削減でき、かつ、処理を簡素化することのできる画像生成装置を得る。
【解決手段】比較処理部232は、デスティネーションデータの画素を構成する不透明度と、赤、緑、青といった色の要素の値を、演算装置100から設定された値と比較する。ブレンド処理部234は、比較処理部232の比較結果に基づいて、演算装置100で設定されたピクセルデータのブレンド処理を行い、フレームバッファ300に新たに書き込むピクセルデータを生成する。
(もっと読む)
位置特定システム
【課題】航空機から送信された信号の反射信号を利用して航空機の飛行を監視する。
【解決手段】位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
(もっと読む)
土地状態推定システム及び土地状態推定方法
【課題】 3時期以上の衛星画像において、各時期の画像のピクセルごとに計算できる任意の一つの指標値を用いて、対応する土地の状態を推定できる土地状態推定システムを提供することを課題とする。
【解決手段】 なんらかのイベント(例えば、津波、等)発生前とイベント発生後とその後の少なくとも1時期の合計3時期以上の衛星画像における、位置的に対応する、ピクセルごとに計算できる任意の指標値から、対応する土地の状態を表す特徴量を推定することを特徴とする。
(もっと読む)
レーダ基準方位補正装置、レーダ装置、レーダ基準方位補正プログラム、及びレーダ基準方位補正方法
【課題】レーダ装置の探知方向の基準である基準方位を高精度に補正するレーダ基準方位補正装置を提供する。
【解決手段】レーダ基準方位補正装置は、相対位置取得部と、絶対位置取得部と、演算部と、補正部と、を備える。相対位置取得部は、レーダ装置(レーダアンテナ)に対する物標の相対位置を取得する。絶対位置取得部は、レーダ装置の絶対位置及び物標の絶対位置を取得する。演算部は、相対位置に基づく、レーダ装置に対する物標の方向と、絶対位置に基づく、レーダ装置に対する物標の方向と、の差である誤差角を求める。補正部は、演算部が求めた誤差角に基づいて、基準方位を補正する。
(もっと読む)
レーダ装置
【課題】レーダ装置の近傍に配置されたECM装置、通信装置、他のレーダ装置などの干渉信号源が、強い断続的信号を送信する場合であっても、複数目標からの反射信号を欠落せずに受信でき、干渉信号源との干渉を低減する。
【解決手段】干渉信号源の動作を制御する制御ユニット15から出力された制御信号に基づいてレーダ装置は動作する。干渉信号源16が送信停止するタイミング情報を制御ユニット15から受取り、干渉信号が停止する前に探知距離相当の時間長のチャープ変調信号を送信し、干渉信号の停止と同時に短い受信期間内に、探知距離内に位置する複数目標からの反射信号を受信する。目標までの距離情報を送受信の差分周波数により得ているため、必要な受信期間が最大探知距離に依存せず、短期間に受信できる。また干渉信号の存在しない時間のみの受信信号を用いて信号処理するため、干渉信号源との干渉を低減できる。
(もっと読む)
遠隔通信装置の間の見通し線(LOS)距離を判定する方法
【課題】送受信器の間の距離を正確に判定する。
【解決手段】遠隔装置から到着信号を受信するように構成された超再生受信器と、到着信号に基づいて遠隔装置までの距離を少なくとも部分的に判定するように構成された回路と、を含む無線通信装置を開示する。超再生受信器は、比較的高い感度で、距離測定回路が到着信号の見通し線(LOS)部分をその非LOS部分から識別することを可能にするように構成される。この回路は、到着信号のLOS部分の時刻を使用して、遠隔装置までの距離をより正確に判定することができる。この回路は、信号を遠隔装置に送信し、遠隔装置から応答信号を受信することによって、信号の送信および受信の各々の時刻から遠隔装置までの距離を判定することができる。
(もっと読む)
航空機情報表示装置及びプログラム
【課題】フライトプランのない不審な航空機の監視を容易とする。
【解決手段】実施形態の航空機情報表示装置は、管制空域内に存在する航空機を検知したセンサデータを受け付けて、航空機にかかる航空機情報を取得する航空機情報取得手段と、管制空域内を飛行する航空機のフライトプランを記憶するフライトプラン記憶手段と、取得された航空機情報をもとに、管制空域内に存在する航空機の各々が記憶されたフライトプランの航空機に該当するか否かを判定する判定手段と、判定手段の判定結果をもとに、記憶されたフライトプランに該当する航空機の航空機情報と、記憶されたフライトプランに該当しない航空機の航空機情報とを異なる表示態様で表示する表示手段とを備える。
(もっと読む)
レーダ画像生成装置及びレーダ画像生成方法
【課題】レーダ画像を生成する際にGPUの負荷を抑えることが可能なレーダ画像生成装置を提供する。
【解決手段】レーダ画像生成装置は、インタフェース部、位置データ生成処理部、テクスチャ変換処理部、頂点バッファ、テクスチャバッファ、レーダ画像生成部、出力部及び背景用テクスチャ更新部を具備する。位置データ生成処理部は、インタフェース部で受信されたデジタル信号に基づいて位置データを生成する。テクスチャ変換処理部は、デジタル信号に含まれる目標情報をテクスチャデータに変換する。レーダ画像生成部は、第1の周期で頂点バッファ及びテクスチャバッファに記憶される位置データ及びテクスチャデータから第1の表示画面データを作成し、既定位置データ及び背景用テクスチャデータから第2の表示画面データを作成し、これらからレーダ画像データを生成する。背景用テクスチャ更新部は、第2の周期で、背景用テクスチャデータを更新する。
(もっと読む)
情報表示装置、レーダ装置、ソナー装置、及び情報表示方法
【課題】センサの検出内容に所定の処理を行って得られる情報を表示する情報表示装置において、検出対象が信号処理の影響で消えたのか検出対象自体が存在しないのかをユーザが把握できるように情報の表示を行う構成を提供する。
【解決手段】レーダ指示器(情報表示装置)は、センサ信号取得部と、信号処理部と、表示部と、を備える。センサ信号取得部は、レーダアンテナの検出内容を示す信号であるセンサ信号を取得する。信号処理部は、センサ信号取得部が取得したセンサ信号に対して、第1信号処理部による第1信号処理と、第2信号処理部による第2信号処理と、を行う。表示部は、第1信号処理部を行った第1情報を表示画面に表示するとともに、第2信号処理を行った第2情報のうち、前記第1情報と異なる情報を、当該第1情報と異なる表示形態(表示色等)で表示画面に表示する。
(もっと読む)
無線周波信号の同定装置
【課題】照合の為の演算量の削減や、照合に要する時間を短縮することのできる無線周波信号の同定装置を得る。
【解決手段】照合制御手段3は無線周波信号特徴抽出手段2で抽出された無線周波信号特徴パターンから概略特徴を求め、制御情報として制御情報記録保存手段4に保存する。新たな無線周波信号特徴パターンが抽出された場合、照合制御手段3は、その概略特徴を求め、制御情報記録保存手段4に保存されている制御情報に基づいて、概略情報と一致する照合信号特徴パターンを判定する。照合制御手段3は、記録保存手段6の照合信号特徴パターンのうち、概略情報と一致する照合信号特徴パターンを照合手段5に出力する。照合手段5は、新たな無線周波信号特徴パターンと、概略情報と一致する照合特徴パターンとのみ照合を行う。
(もっと読む)
ドップラ式速度計
【課題】ドップラ効果を利用して速度を計測するドップラ式速度計において正確な速度を得る。
【解決手段】所定周波数の送信波を送信する送信手段110と、送信波の反射波を受信する受信手段120と、反射波に基づくドップラ信号の周波数スペクトルを検出するスペクトル検出手段141と、を備え、検出した周波数スペクトルを用いて速度を計測するドップラ式速度計1であって、速度に対するドップラ信号の基準周波数スペクトルと検出した周波数スペクトルとの相関から基準周波数スペクトルを特定するスペクトル特定手段142と、特定した基準周波数スペクトルに対応する速度を反射波に基づいて検出した速度として出力する速度出力手段143と、を備える。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
3次元デジタル記録システム
【課題】構造物表面の不良箇所を3次元のデジタルデータとして記録する。
【解決手段】本発明に係る3次元デジタル記録システムは、構造物表面の不良箇所に接触している間パルス波を送信する入力装置10と、前記入力装置10からのパルス波を受信すると、パルス波を送信する3個の距離測定装置20と、を備え、前記入力装置10は、前記入力装置10がパルス波を送信した時間と、前記3個の距離測定装置20の各々からのパルス波を受信した時間との差から、前記入力装置10と前記3個の距離測定装置20の各々との距離を算出し、前記距離から前記入力装置10の位置情報を算出する制御部15と、前記位置情報を記憶するメモリ13と、を有する。
(もっと読む)
移動検知システム
【課題】 子機の移動を精度良く検知することができる移動検知システムを提供する。
【解決手段】 親機4と、親機4との間で電波信号を送受信する子機6と、を備える。親機4は、子機6との間で送受信する電波信号の強度レベルの変化に基づいて、子機6の移動を検知するように構成されている。また、親機4と子機6との間で送受信される電波信号を弱める又は遮断するための電波信号遮断手段34が設けられている。子機6が検知エリア16に位置するときには、親機4と子機6との間における電波信号の送受信が可能であり、子機6が検知エリア16に隣接する非検知エリア20に位置するときには、親機4と子機6との間で送受信される電波信号は、電波信号遮断手段34によって弱められ又は遮断される。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
1 - 20 / 636
[ Back to top ]