
Fターム[5J070AJ14]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762) | 複数のビデオメモリ (126)
Fターム[5J070AJ14]に分類される特許
1 - 20 / 126
微細振動特徴量算出装置、微細振動特徴量算出方法及びプログラム
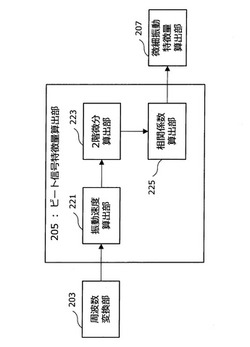
【課題】微細振動の測定環境に関わらず、被測定物に発生している微細振動に関する特徴量を正確に算出すること。
【解決手段】本発明に係る微細振動特徴量算出装置は、微細振動を伴う物体に対して、所定の周波数を有する放射波を放射するとともに、当該放射波の前記物体による反射波を検出し、放射波の周波数と反射波の周波数との差分に相当する周波数を有するビート信号を出力するドップラーセンサから出力された当該ビート信号を取得するビート信号取得部と、取得したビート信号を周波数領域の信号へと変換する周波数変換部と、周波数領域の信号へと変換されたビート信号を利用して、微細振動の振動速度の時間に関する急峻な変化を表すビート信号特徴量を算出するビート信号特徴量算出部と、を備える。
(もっと読む)
物標を探知して表示する装置

【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
スキャン相関処理装置、レーダ装置、及びスキャン相関処理方法
【課題】レーダ映像の分解能を向上させる場合においても、スキャン相関処理におけるメモリ使用量の増加を抑制する。
【解決手段】スキャン相関処理装置は、1回前に算出された出力値に対応する級を選択するとともに、入力されるスイープデータ値に対応する級を選択する級選択部と、出力値に対する級と、スイープデータ値に対する級との組合せそれぞれに、出力値を算出する演算を示す命令コードを対応付けた命令テーブルを予め記憶している命令記憶部と、級選択部が選択した1回前に算出された出力値に対応する級と、入力されるスイープデータ値に対応する級との組合せに応じた命令コードを命令記憶部から読み出す命令コード読出部と、命令コード読出部が読み出した命令コードに基づいて、1回前に算出された出力値、及び入力されるスイープデータ値から出力値を算出する演算部とを備える。
(もっと読む)
物標運動推定装置
【課題】自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供する。
【解決手段】レーダ装置が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
(もっと読む)
スクラップ表面プロファイル計測方法
【課題】容器内に積層されたスクラップ表面までの距離を適正に計測して容器内のスクラップの表面プロファイルを高精度に計測することができるスクラップ表面プロファイル計測方法を提供すること。
【解決手段】電磁波距離計測部11は、容器2内のスクラップ21表面上に、容器2内のスクラップ21のうちの大きいスクラップ21のサイズと同程度またはそれ以下の大きさのスポットが照射されるように調整されたビーム幅の電磁波をアンテナ111から送信し、アンテナ111によってその反射波を受信することで容器2内のスクラップ21表面までの距離を計測する。
(もっと読む)
探知装置、レーダ装置、探知方法、および探知プログラム
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
(もっと読む)
超広帯域パルス・センサ
【課題】外部の干渉波の影響を除去でき、目標物までの距離検出精度の高いUWBパルス・センサの提供。
【解決手段】探知波生成部15は、周波数fmin〜fmaxを間隔Δfで等分した全周波数点集合から使用周波数点集合を含む周波数点を離散周波数点系列に従って並べ、探知波を順次発振する。探知波が目標物で反射された反射波は、受信後、位相検波器10で位相検波され周波数点に対する位相点系列が生成される。欠落補償部11は、各位相点に対応する周波数点の昇順又は降順で並べ替え、欠落した周波数点に対応する位相点を補間し、補間された位相点系列を算出する。逆離散フーリエ変換部12は、補間された位相点系列を逆離散フーリエ変換しレンジ・スペクトルを生成し、レンジ・スペクトルのピークの位相値からアンテナから目標物までの距離を算出する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】検出精度を低減させることなく、高い精度で受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部22は、送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する。ターゲット検知部31は、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知する。ターゲット連結処理部32は、現在及び過去の検知サイクルにおいて検出される前記ターゲットを関連付ける。方位検出部30は、複素数データに基づく生成複素数データを、データ生成手段に対応させて生成し、アンテナ毎に、ターゲットの存在が検知されたビート周波数の複素数データ、及び、生成複素数データを用いてそれぞれ作成された正規方程式に基づいて受信波の到来方向を算出する。
(もっと読む)
画素データ生成装置、画像表示装置、レーダ装置、画素データ生成方法及び画素データ生成プログラム
【課題】レーダ装置等の画像表示装置が備える画素データ生成装置において、周方向を考慮した補間データを画素抜け部分に漏れなく描画できる構成を提供する。
【解決手段】レーダ装置の画像表示装置が備える画素データ生成装置は、エコー強度計算部と、補間内容生成部と、を備える。エコー強度計算部は、スイープラインS1上のサンプルデータと、スイープラインS2上のサンプルデータと、をXY直交座標系の画素データにそれぞれ変換する。補間内容生成部は、XY直交座標系のX軸又はY軸に平行な補間対象ライン上にある注目画素と、同一の補間対称ライン上にある対応画素と、の間に位置する対象画素の画素データを生成する。この対象画素の画素データは、スイープラインS1上の画素データとスイープラインS2上の画素データとに基づいて生成される。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】ScanSARモードで観測されたデータからレーダ画像を効率的に生成する。
【解決手段】画像処理装置100において、バーストデータ記憶部101は、ScanSARの各バーストに対する地上からの散乱波のデータをバーストデータとして記憶装置152に記憶する。スキャンデータ生成部102は、記憶装置152からバーストデータを、対応するスキャンごとに処理装置151により読み出して、スキャンごとに、読み出したバーストデータの隙間をゼロで埋めてスキャンデータを処理装置151により生成する。画像処理部103は、スキャンごとに、スキャンデータ生成部102により生成されたスキャンデータからレーダ画像を処理装置151により生成する。
(もっと読む)
偽像低減装置、レーダ装置、偽像低減方法、および偽像低減プログラム
【課題】画像処理を行うことによりビームサブ偽像を低減する偽像低減装置を提供する。
【解決手段】ビームサブ偽像検出部154は、各距離における極座標画像データについて、所定レベル以上の値を示す画素がスイープ方向に連続する数を算出し、連続スイープ数が閾値Th以上であれば、偽像候補として抽出する。また、ビームサブ偽像検出部154は、偽像候補の方位方向の幅と、距離方向の幅とに基づいて、ビームサブ偽像を検出する。
(もっと読む)
送信装置、送信方法、受信装置、受信方法、物標探知装置、および物標探知方法
【課題】2次エコーや干渉を抑圧し、物標による真の像のみを正確に探知できる物標探知装置を実現する。
【解決手段】送信部12は、短パルス信号PSと中パルス信号PMとを含むパルス列PGを、所定のパルス列繰り返し周期PRIで繰り返しながら送信する。少なくとも1つのパルス列PGでは、それぞれのパルス列PGの開始タイミングを基準にしてパルス列PG内での短パルス信号PSおよび中パルス信号PMの送信タイミングとが異なるように設定されている。受信信号処理部14は、このようなパルス列PGの各パルス状信号の受信データを取得し、それぞれのパルス列PGの開始タイミングを基準にした各パルス状信号の時間的位置が一致するように、受信データを置き換える。そして、受信信号処理部14は、置き換えた受信データをパルス列PG間で比較し、パルス列PG間での再現性等を得ることで、2次エコーや干渉と真の像とを識別する。
(もっと読む)
偽像低減装置、レーダ装置、偽像低減方法、および偽像低減プログラム
【課題】画像処理により偽像を低減する偽像低減装置を提供する。
【解決手段】偽像低減処理部17は、自船に最も近く、物標と判断できる程度の高いエコーレベル(所定のしきい値以上のエコーレベル)を有するエコーの反射物(鏡)とする。偽像低減処理部17は、物標のエコー画像を細線化し、線画像に変換する。偽像低減処理部17は、このようにして得られた線画像の端点を2点抽出し、反射物をこの2点の座標で表すベクトルとして設定する。偽像低減処理部17は、自船の位置と上記端点(端点Aおよび端点B)を結ぶ直線(ラインAおよびラインB)を設定する。そして、反射物の直線とラインA、ラインBで囲まれた領域を偽像領域とする。偽像低減処理部17は、以上の処理を行った後、偽像領域内のエコーレベルを低減する(顔像輝度値を下げる)処理を行い、偽像を低減する。
(もっと読む)
離席検知システム
【課題】 椅子における着座に伴う人の動きや椅子のフレームの微小な変形を非接触で測定して着座の有無を判定し、荷重を受けずトラブルや劣化が生じにくい離席検知システムを提供する。
【解決手段】 椅子に座った人に向けて、センサ部11から電磁波を送信し、人で反射した反射波を同じセンサ部11で受信すると、このセンサ部11からの信号を入力される判定処理部12が、人の着座や椅子から離れる等の動きに伴う反射面91の存否やセンサ部11と反射面91との間隔変化に応じて変わる信号の、所定の閾値を超える変化から椅子に人が着座しているか否かを判定し、離れた箇所の管理者等に、人が椅子から離れた状態を通知可能となることから、椅子に座っている人に対し非接触で着座の有無を検出でき、また検出のために荷重を受けて動くような可動部分も存在せず、検出機構のトラブルや劣化が生じにくく、長期にわたり離席検出性能を維持できる。
(もっと読む)
観測信号処理装置
【課題】観測装置と物標の間に相対速度が有る場合でも、良好なコヒーレント積分を行うことの出来る観測信号処理装置を提供する。
【解決手段】1探査当たり複数回の搬送波で変調されたパルス信号を探査信号として順次送出し、物標で反射された反射信号と、パルス信号の遅延変調パルス信号に基づいて複数の観測値を得、該得られた観測値をコヒーレント積分して積分値を外部に対して出力することの出来る装置であって、観測すべき領域に応じたコヒーレント積分回数を格納するメモリ、観測すべき領域に応じたコヒーレント積分回数分のパルス信号を探査信号として送出する手段、送出されたパルス信号の反射波を補足し観測値として蓄積する手段、概算相対速度を格納するメモリ、物標の概算相対速度に基づいて位相補正量を演算する手段、演算された位相補正量に基づいて、観測値について位相重み付きコヒーレント積分を行って外部に出力する手段から構成される。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】サイドローブによる偽像を抑圧することができる信号処理装置を提供する。
【解決手段】レーダ指示機3は、物標存在領域検出部21と、過去スイープ蓄積部22と、偽像抑圧部23と、を備えている。物標存在領域検出部21は、物標が存在する領域を検出する。過去スイープ蓄積部22は、方位方向に連続したレーダエコーを取得可能である。偽像抑圧部23は、方位方向に連続したレーダエコーから得られる情報に基づいて、前記レーダエコーに含まれる偽像を抑圧する処理を行うことが可能である。そして、偽像抑圧部23は、物標が存在する領域のレーダエコーに対しては、それ以外の領域のレーダエコーに対する処理とは異なる処理を行っている。
(もっと読む)
レーダ装置
【課題】JEMが発生した場合の目標相対速度を正しく算出し目標検出性能の向上を図ったレーダ装置を得る。
【解決手段】周波数が異なるキャリア信号を所定時間間隔でパルス変調した送信信号を放射する手段、目標で反射した信号を受ける受信手段、受信された時間領域の受信信号を周波数領域に変換する周波数領域変換手段206、周波数領域の受信信号における信号強度に基づき目標候補を検出し、目標候補の相対速度を求める目標候補検出手段207、目標候補検出手段で異なるキャリア周波数で検出された目標候補の位相差を求め位相差から目標候補の仮の相対距離を求める仮の相対距離算出手段208、目標候補の仮の相対距離に基づき目標候補を判定する目標判定手段209、目標と判定された目標候補の相対速度を目標候補検出手段で求めた目標の相対速度で求める目標相対速度算出手段210を有す。
(もっと読む)
レーダビデオ表示装置
【課題】本発明の課題は、レーダビデオの特性上必要なビデオデータの減光処理、高輝度の点を優先的に描画する為の処理をGPU処理で行うことにより、CPU処理の負荷を大幅に軽減したレーダビデオ表示装置を提供することにある。
【解決手段】本発明は、CPUにより受信したアジマス分のデータをメインメモリからテクスチャメモリに送る処理をし、GPUにおいて、テクスチャメモリから座標、輝度、更新時間の描画頂点情報が入力され、更新時間と現在時間の差で輝度に対して減光計算を行い、減光計算を行った1レンジ分解能分のデータの輝度の階調情報を座標軸のZとして3次元化すると共に、描画頂点情報の3次元の座標値と輝度からレンダリング処理を行って2次元の画像データに変換する処理をする。
(もっと読む)
目標相関処理装置、目標相関処理方法及びプログラム
【課題】地上目標物に適した目標相関処理装置を提供する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
(もっと読む)
レーダ装置および探知方法
【課題】反射波の中からマルチパスを判定し削減することで、その影響を低減し、目標物の検知精度を向上させるレーダ装置および探知方法を提供する。
【解決手段】 目標物を検知するレーダ装置であって、送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、を備えるレーダ装置である。
(もっと読む)
1 - 20 / 126
[ Back to top ]