
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
21 - 40 / 636
検出装置及び検出方法
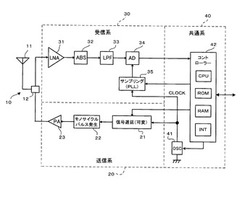
【課題】本発明は従来よりも設計の自由度を向上させた等価時間サンプリング方式の検出装置を提供する。
【解決手段】送信手段(20)は、各送信パルスが所定の送信パルス繰り返し周期内に配置されるパルス列信号であって、各送信パルスの位相を当該送信パルス繰り返し周期内において段階的にシフトした送信パルス列信号を検出波として送出する。受信手段(30)は、反射波を受信して受信パルス列信号を形成し、受信パルス列信号をサンプリングして複数の受信パルスの波形データを出力する。信号処理手段(40)は、複数の受信パルスの各波形データの時間軸を各送信パルスの位相の段階的シフトに対応して調整し、各波形データを合成して一つの受信パルスの波形データを形成する。
(もっと読む)
後側方障害物検知装置

【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
追尾装置及びコンピュータプログラム及び追尾方法
【課題】正しい相関決定を実施する。
【解決手段】探知データ取得部110は、時刻ごとにセンサから探知データ512を取得する。航跡データ記憶部120は、航跡データ(航跡群521)を格納する。ゲート計算部131は、航跡データから計算した航跡の予測位置に基づくゲートを計算する。ゲート内外判定部132は、探知データが前記ゲート内に入るかどうかを判定する。相関尤度計算部133は、航跡が初探知データのみから構成される場合は、探知データ取得部110によって取得された前記探知データ情報に基づいて第二探知データとの相関尤度を計算し、航跡が初探知データ以降の探知データからも構成される場合は、航跡の予測位置に基づいて、前記ゲート内に入る探知データとの相関尤度を計算する。
(もっと読む)
映像表示装置及びレーダ装置
【課題】必要な領域にのみ信号処理を行って、場所に応じた的確な情報を取得可能な映像表示装置を提供する。
【解決手段】レーダ指示器は、表示部と、マウスと、レーダ映像生成部と、を備える。表示部は、レーダアンテナが受信したエコー信号に基づくレーダ映像を表示する。マウスは、レーダ映像が表示される領域から一部の領域を選択する操作が可能である。レーダ映像生成部は、マウスにより選択された領域である選択領域と、選択領域以外の領域と、で異なる信号処理を行ってレーダ映像を生成する。
(もっと読む)
二次監視レーダ
【課題】航空機の監視に加え、気象情報を容易に収集する。
【解決手段】モードS二次監視レーダは、航空機に質問信号を送信し、当該質問信号に応答して航空機から送信された応答信号を受信して航空機の飛行を監視する二次監視レーダであって、送信手段と、受信手段と、気象情報取得手段と、位置特定手段と、出力手段とを有する。送信手段は、ロールコール期間にGICBレジスタの気象情報の送信要求を含む質問信号を送信する。受信手段は、航空機から質問信号に応じて送信された応答信号を受信する。気象情報取得手段は、前記受信手段が受信した応答信号から、GICBレジスタの気象情報を取得する。位置特定手段は、前記受信信号が受信した応答信号から、航空機の位置情報を特定する。出力手段は、前記気象情報取得手段で取得された気象情報を、前記位置特定手段で算出された位置情報と関連づけて出力する。
(もっと読む)
レーダ装置
【課題】部品点数の増加を抑えて、ナイキスト周波数による折り返しで発生した信号成分を検出する。
【解決手段】複数のアンテナの送受信波に基づいてターゲットの検出信号を生成する検出信号生成部と、生成されたターゲットの検出信号に対して周波数解析を行い、ターゲットの信号成分を抽出し、該信号成分に対して所定の処理を実行することで、ターゲットまでの距離、ターゲットとの相対速度、ターゲットの方位のうち少なくとも何れか一つを算出する検出信号処理部と、を備え、検出信号生成部は、ナイキスト周波数よりも高い周波数帯域において各アンテナに対応する検出信号に変化を与えるフィルタ部を有し、検出信号処理部は、フィルタ部によって変化が与えられた各アンテナに対応する検出信号から信号成分を取得することで、該信号成分がナイキスト周波数による折り返しで発生した信号成分か否かを判定する。
(もっと読む)
画像レーダ信号処理装置
【課題】地上局で精度の高いSAR画像を従来以上の観測データ数で取得する。
【解決手段】地上局からのコマンドを受信するコマンド受信手段11、コマンドに従い、所定領域に信号を放射し、当該信号に対する当該所定領域からの反射信号を受信することで受信信号を取得する目標観測手段12、飛行体の運動データを取得する飛行体観測手段13を有する観測手段1と、コマンドに従い、受信信号および運動データに基づいて、観測手段1が観測を行った通信可能時間帯内で画像再生処理を行い、SAR画像を再生する高速画像処理手段3と、コマンドに従い、受信信号および運動データに基づいて、通信不可時間を利用して高速画像処理手段3より高精度な画像再生処理を行い、SAR画像を再生する小型画像処理手段4と、コマンドに従い、SAR画像を前記地上局に送信する送信処理手段5とを備えた。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導
【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
情報表示装置
【課題】所定の地点の近傍の詳細な情報と当該地点の遠方の情報とを同時に表示可能な情報表示装置を提供する。
【解決手段】レーダ指示器(情報表示装置)は、取得部と、制御部と、を備える。取得部は、移動体(他の船舶)、移動時(航海時)の目印となるランドマーク、及びユーザに登録されたポイント(ユーザ登録ポイント)のうち少なくとも1つからなる表示対象の位置情報を取得する。制御部は、自船の位置情報及び自船の周辺情報をレーダ映像表示領域35aに表示するとともに、表示対象の位置がレーダ映像表示領域35aの外側となる少なくとも1つの表示対象を、表示対象が位置する方向に対応させて、レーダ映像表示領域35aの外周部35bに表示する。
(もっと読む)
移動体の速度計測装置
【課題】移動体の移動速度を検出できる範囲を大きく確保でき、かつ、打撃前後の移動体の移動速度、移動体を打撃する物体の速度を同時に計測する。
【解決手段】ドップラーセンサ14を用いて打撃領域の前方から打撃領域に向かって移動するボール2と、打撃領域でボール2を打撃するバット4と、打撃されたあとのボール2とに向けて送信波W1を送信し、バット4とボール2とで反射された反射波W2を受信してドップラー信号Sdを検出する。ドップラー信号Sdから変換された中間データは蓄積部30に時間経過に従って順番に予め定められた蓄積期間分蓄積される。計測部18は、蓄積部30に蓄積された中間データに基づいて打撃時点を特定し、ボール2がアンテナ12に接近する方向に移動する接近速度、ボール2がアンテナ12から離間する方向に移動する離間速度、バット4の速度である物体速度を算出する。
(もっと読む)
天気および地面の反射情報を生成するための方法およびシステム
【課題】天気レーダーリターンデータを三次元バッファに格納する方法およびシステムの提供。
【解決手段】航空機に置かれるシステム30は、レーダー信号を送信し、送信されたレーダー信号のレーダーリターンの結果として、レーダー測定値を生成するレーダー・システム40を含む。三次元バッファ43は、複数の記憶場所を含む。プロセッサ42は、生成されたレーダー測定値に基づいた三次元バッファの記憶場所の反射値と、記憶場所に関して以前に格納された反射値と、不確実性パラメータと生成しまたは更新する。地面エレメントのための正規化されたレーダー断面の不確実性パラメータは、各々のエレメントと関連する地面のタイプに基づいて初期化される。天気反射の不確実性パラメータは、演繹的な情報に基づいて初期化される。生成された反射値は、記憶場所による三次元バッファ装置に格納される。
(もっと読む)
地中レーダ
【課題】地中の埋設物を探知する地中レーダシステムにおいて、地中レーダのオペレータの探査作業の効率化や探査データの品質を向上する。
【解決手段】地中に向けて電磁波を送出する電磁波送信部5と、送出された電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部6により受信された電磁波に基づく受信波データから地中に埋設された埋設物11を探査する地中レーダ1において、探査エリアでのレーダ本体2の二次元的な位置を測定する位置測定部3と、レーダ本体2の移動方向の情報を取得する方向測定部4と、探査エリアの探査時に、電磁波受信部6により受信した電磁波に基づく受信波データと、位置測定部3により取得された二次元位置データと、方向測定部4により取得された移動方向情報とを一単位の探査データとし、探査データを探査位置毎にそれぞれ記憶する記憶部8と、を備えて構成する。
(もっと読む)
物標検出装置、物標検出方法およびプログラム
【課題】歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
(もっと読む)
動き検出装置、及び動き検出装置を備えたエレベータ
【課題】検知モードの切り換えを必要とすることなく、複数の動きの状態を選択して検出することができる動き検出装置を提供する。
【解決手段】動き検出装置2は、対象物に電磁波信号を放射してドップラー信号を取得するドップラー信号検出回路13と、ドップラー信号を増幅する対数増幅器14,15と、ドップラー信号を所定のサンプリング周波数でサンプリングしてAD変換するAD変換回路16と、ドップラー信号に対してFFT処理を実行するFFT処理回路17と、ドップラー信号から対象物の動きを検出する動き検出回路20とを備える。動き検出回路20は、ドップラー信号の振幅又は電力及び位相を計算し、対象物の動きの状態を選択することと、選択された動きの状態に応じてサンプリング周波数を選択的にAD変換回路16に設定することとを繰り返し、複数の動きの状態に応じた異なる周波数成分を含むドップラー信号を取得する。
(もっと読む)
指示支援装置
【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
レンジサイドローブ除去装置、信号処理装置、同信号処理装置を備えたレーダ装置、レンジサイドローブ除去方法及びプログラム
【課題】レンジサイドローブによる偽像を低減し、物標を確実に検出する。
【解決手段】レーダ装置1において、レンジサイドローブ除去装置36は、レーダーアンテナ10からの受信信号を取得し、パルス圧縮処理を行ってパルス圧縮信号を生成するパルス圧縮部33と、受信信号から、パルス圧縮信号のレンジサイドローブの擬似信号を生成する擬似レンジサイドローブ生成部34と、パルス圧縮信号から擬似信号に相当する成分を除去する信号除去部35と、を備える。
(もっと読む)
二次監視レーダ及び監視方法
【課題】拡張スキッタを利用して、航空機の捕捉の精度を向上する。
【解決手段】第1トラックファイル生成手段と、第2トラックファイル生成手段と、抽出手段と、抽出手段が抽出した航空機に送信する質問を生成する質問生成手段と、生成した質問を送信する送信手段とを備える。第1トラックファイル生成手段は、航空機から送信された拡張スキッタに含まれる航空機の識別子及び当該航空機の位置と、計時手段から取得した受信時刻とを関連付けて第1トラックファイルデータに追加する。第2トラックファイル生成手段は、航空機から送信された応答に含まれる航空機の識別子及び当該航空機の位置と、受信時刻とを関連づけて第2トラックファイルデータに追加する。抽出手段は、第1トラックファイルデータに含まれる位置及び受信時刻と、第2トラックファイルデータに含まれる位置及び受信時刻とを利用して、所定の位置に存在する航空機を抽出する。
(もっと読む)
21 - 40 / 636
[ Back to top ]