
地中レーダ
【課題】地中の埋設物を探知する地中レーダシステムにおいて、地中レーダのオペレータの探査作業の効率化や探査データの品質を向上する。
【解決手段】地中に向けて電磁波を送出する電磁波送信部5と、送出された電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部6により受信された電磁波に基づく受信波データから地中に埋設された埋設物11を探査する地中レーダ1において、探査エリアでのレーダ本体2の二次元的な位置を測定する位置測定部3と、レーダ本体2の移動方向の情報を取得する方向測定部4と、探査エリアの探査時に、電磁波受信部6により受信した電磁波に基づく受信波データと、位置測定部3により取得された二次元位置データと、方向測定部4により取得された移動方向情報とを一単位の探査データとし、探査データを探査位置毎にそれぞれ記憶する記憶部8と、を備えて構成する。
【解決手段】地中に向けて電磁波を送出する電磁波送信部5と、送出された電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部6により受信された電磁波に基づく受信波データから地中に埋設された埋設物11を探査する地中レーダ1において、探査エリアでのレーダ本体2の二次元的な位置を測定する位置測定部3と、レーダ本体2の移動方向の情報を取得する方向測定部4と、探査エリアの探査時に、電磁波受信部6により受信した電磁波に基づく受信波データと、位置測定部3により取得された二次元位置データと、方向測定部4により取得された移動方向情報とを一単位の探査データとし、探査データを探査位置毎にそれぞれ記憶する記憶部8と、を備えて構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地中の埋設物を探査する地中レーダに関し、詳しくは、地中レーダのオペレータの探査作業の効率化や探査データの品質を向上することができる地中レーダに係るものである。
【背景技術】
【0002】
道路工事や鉄道軌道の改良工事等において、例えば、コンクリート等の掘削作業を伴って行うことがある。この様な掘削作業に先立って、ガス管や電力ケーブル等の既設の設備の埋設状況を調査して、作業の安全確保を図ることがある。この様な埋設状況の調査は、一般的に、オペレータが、地中レーダを移動操作し、得られた探査データを解析することによって行われている。
【0003】
ここで、この種の地中レーダとしては、例えば、特許文献1等に記載されたものがある。特許文献1に記載された地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された電磁波の反射波を受信する電磁波受信部とを備え、電磁波受信部によって受信された電磁波に基づく受信波の受信波データ(以下において、「Aスコープデータ」と言う)等により地中に埋設された埋設物を探査する構成である。そして、一般的に、この種の地中レーダは、例えば、レーダ本体に設けた車輪の回転数を読取って移動距離を測定し、得られた移動距離データとAスコープデータに基づいて、地中レーダの移動方向の距離を横軸とし地中深さ(時間)を縦軸とする二次元の画像データ(以下において、「Bスコープデータ」と言う)を生成するように構成されている。このような一般的な地中レーダを用いて埋設状況を調査する場合、オペレータは、探査エリアの路面等にチョーク等で格子状に測定線を描き、その各測定線に沿って地中レーダを移動操作して、埋設物の探査を行う。この測定の際、オペレータは、測定線の各位置で得られるAスコープデータが、どの方向のどの測定線上のデータなのかが後で分かるような情報をメモしておく。そして、オペレータは、メモした情報に基づいてBスコープデータに基づく二次元画像を測定線順に並べて、埋設物の埋設状況を解析し、既に描かれている測定線を基準にして路面上等に埋設位置をマーキングしたり、埋設物の埋設位置を描いた図面等を添付した報告書を作成したりしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−151603号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来、この種の地中レーダを用いて埋設状況を調査する場合、オペレータは、探査エリア内の路面等に格子状に測定線を描いたり、各測定線に沿って地中レーダを移動操作したときに、その測定線の各位置で得られるAスコープデータが、どの方向のどの測定線上のデータなのかが後に分かるように、例えば、測定線の位置とレーダ本体の移動方向の情報をメモすることによりAスコープデータを取得した時のレーダ本体の2次元的な位置と移動方向とAスコープデータとを紐つけしてデータ管理したりしなければならず、探査作業の作業負荷が高い。このように、オペレータによる探査作業は、上記のような各測定線を描く作業や、Aスコープデータの管理作業や、レーダ本体の移動操作作業や、取得したAスコープデータやBスコープデータ等の探査データの解析作業等多岐にわたっており、オペレータへの負荷が高いため、探査作業の効率化が望まれている。また、受信する電磁波にノイズが含まれる場合もあり、探査データの品質の向上も求められている。
【0006】
そこで、本発明は上記課題に着目し、オペレータの探査作業の効率化や探査データの品質を向上することができる地中レーダを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による請求項1に係る地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、前記レーダ本体の移動方向の情報を取得する方向測定部と、前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データと、前記方向測定部によって取得された前記移動方向情報とを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、を備えて構成する。
【0008】
また、上記目的を達成するために、本発明による請求項7に係る地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データとを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、を備えると共に、前記探査データの品質に関するデータ品質情報を、前記探査位置毎に取得する品質情報取得部を備え、前記記憶部は、前記探査データと関連つけて前記データ品質情報を記憶する構成とする。
【発明の効果】
【0009】
本発明による請求項1に係る地中レーダによれば、電磁波受信部によって受信した電磁波に基づく受信波データと、位置測定部によって取得された二次元位置データと、方向測定部によって取得された移動方向情報とを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶することができるため、地中レーダのオペレータは、受信波データ(Aスコープデータ)と二次元の位置情報と移動方向情報とを紐付けして管理するデータ管理作業を行う必要がない。また、レーダ本体を探査エリア内でランダムに移動操作しても、方向測定部によって移動方向情報を取得できるので、格子状に描かれた測定線上を移動操作させる必要もない。したがって、探査エリア内の路面等に格子状に測定線を描く作業が不要となる。このようにして、地中レーダのオペレータの探査作業を効率化することができる地中レーダを提供することができる。
【0010】
本発明による請求項7に係る地中レーダによれば、電磁波受信部によって受信した電磁波に基づく受信波データと、位置測定部によって取得された二次元位置データとを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶し、品質情報取得部によって取得された探査データの品質に関するデータ品質情報を探査データと関連付けて記憶することができるため、地中レーダのオペレータは、データ品質情報により、探査データの信頼性を把握することができる。これにより、記憶部に記憶されている探査データの中に信頼性に劣る探査データがある場合は、その探査データを取得した位置での再度の探査をオペレータに促すことができるため、全体的な探査データの品質を向上することができる。
【図面の簡単な説明】
【0011】
【図1】本発明による地中レーダの第1実施形態を示す概略構成図である。
【図2】上記実施形態の地中レーダを用いて埋設物を探査する状況を説明する図で、探査エリアの一部を側面から示した図である。
【図3】埋設部の延伸方向と直交する方向からレーダ本体を移動操作した状況を示す図で、探査エリアの一部の上面図である。
【図4】埋設部の延伸方向と斜めに交差する方向からレーダ本体を移動操作した状況を示す図で、探査エリアの一部の上面図である。
【図5】電磁波受信部の各受信波形を示した図である。
【図6】レーダ本体の移動方向に沿った断面のBスコープデータに基づき表示部が表示する画像表示例を示す図である。
【図7】上記実施形態の地中レーダを用いて埋設物を探査する状況を説明する図で、探査エリア全体の上面図である。
【図8】記憶部における探査データの管理イメージ図である。
【図9】本発明による地中レーダの第2実施形態を示す概略構成図である。
【図10】上記第2実施形態の地中レーダを用いて埋設物を探査する状況を説明する図で、探査エリア全体の上面図である。
【図11】断面線に沿った各位置における受信波の波形を表示した図である。
【図12】上記第2実施形態の地中レーダの画像表示の動作フロー図である。
【図13】上記第2実施形態の表示部の画像表示例を示す図である。
【図14】本発明による地中レーダの第3実施形態を示す概略構成図である。
【図15】本発明による地中レーダの第4実施形態を示す概略構成図である。
【図16】上記第4実施形態の表示部の表示例である。
【図17】本発明による地中レーダの第5実施形態を示す概略構成図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は本発明による地中レーダの第1実施形態を示す構成図である。
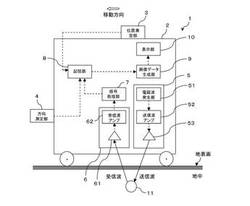
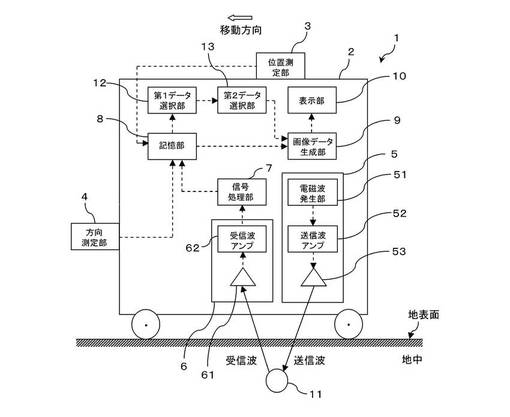
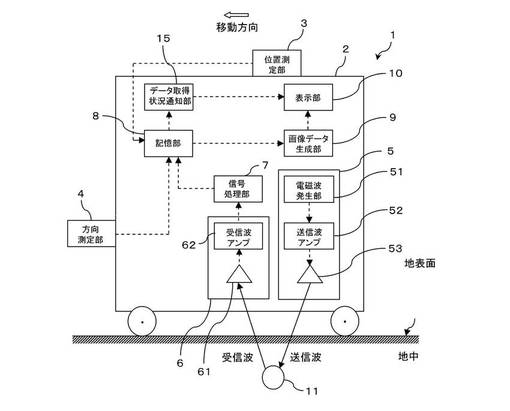
図1において、本実施形態の地中レーダ1は、レーダ本体2と、位置測定部3と、方向測定部4とを備えて構成され、レーダ本体2は、電磁波送信部5と、電磁波受信部6と、信号処理部7と、記憶部8と、画像データ生成部9と、表示部10とを備えて構成されている。
【0013】
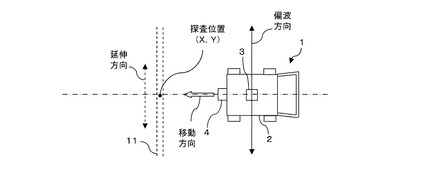
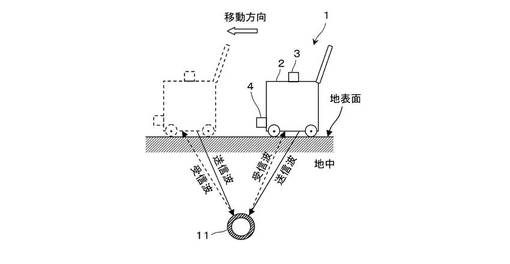
上記レーダ本体2は、前述したように電磁波送信部5と電磁波受信部6等を備え、電磁波送信部5によって地中に向けて電磁波を送出し、電磁波受信部6によって受信された電磁波に基づく受信波の受信波データ(以下において、「Aスコープデータ」と言う)により、地中に埋設された埋設物11の埋設状況を探査する本体となるものである。レーダ本体2は、図1に示すように、例えば、その底部に車輪が取り付けられており、オペレータによってレーダ本体2を容易に移動操作できるようになっている。埋設物11は、例えば、金属管や塩化ビニール管等であり、図2及び図3に示すように、その延伸方向が、レーダ本体2の移動方向と直交する(図2においては紙面前後方向)場合や、図4に示すように、レーダ本体2の移動方向と斜めに交差する場合や、図示省略するがレーダ本体2の移動方向と平行な場合等様々な場合がある。また、レーダ本体2を探査エリア内でランダムな方向で移動操作した場合等においては、レーダ本体2の移動方向と埋設物11の延伸方向との関係は、探査エリア内の場所によって異なる場合がある。
【0014】
上記位置測定部3は、埋設物11の探査エリアでのレーダ本体2の二次元的な位置を測定するものである。位置測定部3は、例えば、GPS(Global Positioning System:全地球測位システム)を用いてレーダ本体2の二次元的な位置を測定するように構成されており、図1に示すように、レーダ本体2の上面にGPS受信機を設けて構成されている。この位置測定部3によって得られるレーダ本体2の二次元位置データは、後述するように、その位置で電磁波受信部6が受信した受信波の受信波データ(Aスコープデータ)と関連付けて記憶部8に記憶される。
【0015】
上記方向測定部4は、レーダ本体2の移動方向を測定するものであり、例えば、方向を測定可能な一般的なジャイロで構成されている。この方向測定部4によって測定した移動方向の情報は、例えば、レーダ本体2が移動操作されている方向を方位で示した情報であり、後述するように、電磁波受信部6が取得したAスコープデータと関連付けて記憶部8に記憶される。
【0016】
上記電磁波送信部5は、図1に示すように、電磁波(送信波)を地中に向けて送出するものであり、電磁波を発生する電磁波発生部51と、電磁波発生部51から発生した電磁波の出力を増幅させる送信波アンプ52と、増幅された電磁波を地中に向けて送出する送信アンテナ部53とを備えている。
【0017】
上記電磁波受信部6は、送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を受信して、出力を増幅させるもので、図1に示すように、反射された電磁波を受信する受信アンテナ部61と、受信した電磁波の出力を増幅させる受信波アンプ62とを備えている。受信波アンプ62で増幅された信号は、信号処理部7に出力される。
【0018】
上記信号処理部7は、受信波アンプ62から出力される信号を処理する一般的なものであり、図示省略するが、例えば、受信波の高調波ノイズ等の不要成分を除去する波形処理部を備えている。信号処理部7で処理されたAスコープデータは、受信波が受信された際に位置測定部3によって得られるレーダ本体2の二次元位置データ及び方向測定部4によって得られる移動方向情報と関連付けて記憶部8に記憶される。
【0019】
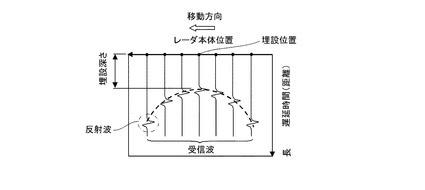
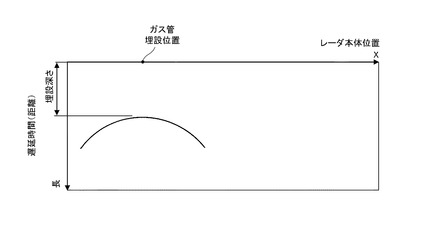
ここで、図2は、例えば、配管等の埋設物11の正確な埋設位置については不明だが、埋設物11の延伸方向(図2の紙面前後方向)については予め分かっている場所において、レーダ本体2を埋設物11の延伸方向と直交する方向(図2の左右方向)から一方向に移動させて、埋設物11を探査する状況を表している。また、図5は、図2及び図3の状況において、電磁波送信部5から電磁波をこの一方向の移動操作中に複数の位置で送出した場合に、受信アンテナ部61が各位置において受信した反射波(受信波)の波形を表示した図である。図5の縦軸は電磁波を送出してから反射波が受信されるまでの遅延時間を表し、下に行くほど、遅延時間が長く、アンテナと埋設物11の距離が遠いことを示し、上に行くほど、遅延時間が短く、距離が近いことを示す。図5に破線で示すように、アンテナと埋設物11の距離が徐々に近くなり、その後遠くなるような場合、距離が一番近くなったところが埋設物11の真上であることを示し、この時の探査エリアにおけるレーダ本体2の二次元的な位置は位置測定部3によって測定されるため、埋設物11の真上の位置、すなわち、埋設位置が分かる。また、距離が一番近くなったところの距離は、埋設物11の地表面からの埋設深さを示す。したがって、埋設物11の上を横切るようにして、レーダ本体2を移動させて探査すると埋設物11の正確な埋設位置及び埋設深さを特定することができる。
【0020】
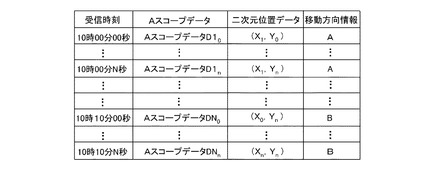
上記記憶部8は、探査エリア内でレーダ本体2を移動させて、電磁波受信部6によって受信した電磁波に基づくAスコープデータと、位置測定部3によって取得された二次元位置データと、方向測定部4によって取得された移動方向情報とを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶するものである。このように構成することにより、記憶部8は、例えば、図示省略するが、オペレータが探査エリア内でレーダ本体2をランダムな方向で移動操作させたとしても、後述する図8に示す探査データの管理イメージ図に示すように、受信波を受信した受信時刻と、その時のAスコープデータと二次元位置データと移動方向情報とを容易に関連付けて管理することができる。本実施形態において、記憶部8は、画像データ生成部9によって、一方向の移動操作の測定毎に生成される後述するBスコープデータが、どの方向のどの位置で移動操作したときのデータなのかが後で分かるように、Bスコープデータと、移動方向情報と、例えば、移動操作の開始点の位置の二次元位置データとを関連付けて記憶するように構成されている。
【0021】
上記画像データ生成部9は、埋設物11の探査結果等の画像データを生成し、表示部10に画像データを出力するものである。画像データ生成部9は、レーダ本体2を、例えば、一方向に移動させ、送信アンテナ部53から電磁波をこの一方向の移動操作中に複数の位置で送出した場合に、受信アンテナ部61が各位置において受信した電磁波のAスコープデータを記憶部8から読み出し、受信強度を濃淡で表示し、さらに、各Aスコープデータと関連付けて記憶部8に記憶された二次元位置データに基づいて位置シフト(レーダ本体2の移動方向へのシフト)させた一般的な二次元の画像データ(Bスコープデータ)を、一方向の移動操作の測定毎に生成する。
【0022】
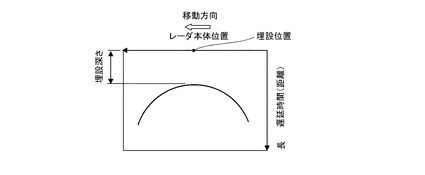
表示部10は、画像データ生成部9によって生成されたBスコープデータに基づいて埋設物11の探査結果を画像表示するものであり、例えば、ディスプレイで構成されている。ここで、図6は、図2〜図4に示すように、埋設物11の上を横切るように、レーダ本体2を一方向に移動させた場合に、Bスコープデータに基づいて表示部10が表示する画像表示例を示す図である。図6においては、横軸はレーダ本体2の移動方向の距離を示し、縦軸は地中深さ(時間)を示す。なお、図6においては、図の簡略化のため、各位置において受信強度の一番高い箇所のみ表示し、他の箇所については省略して示している。
【0023】
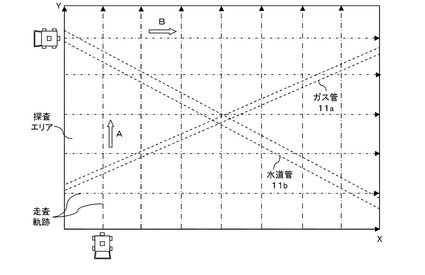
次に、このように構成された地中レーダ1の動作を、図7に示すように、埋設物11としてガス管11aと水道管11bが交差して埋設されている探査エリア内において、レーダ本体2をその走査軌跡(図中一点鎖線で示した線)が格子状になるように移動操作して調査する場合を例として説明する。
【0024】
まず、オペレータは、例えば、レーダ本体2の電源を入れ、測定準備ができたら、測定開始スイッチ等を押して、電磁波送信部5からの電磁波の送出を開始させると共に、レーダ本体2を一方向(例えば、図7に矢印Aで示されたA方向)に押して移動させる。この移動の際、電磁波送信部5は、電磁波を複数の位置で地中に向けて送出し、電磁波受信部6は、電磁波送信部5から送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を各位置で受信し、信号処理部7へ各受信波の信号を出力する。信号処理部7は、受信波の信号内の高調波ノイズ等の不要成分を除去しノイズ除去後の受信波の信号をAスコープデータとして、記憶部8へ出力する。このAスコープデータは、受信された際に位置測定部3よって得られる二次元位置データと、方向測定部4によって得られる移動方向情報と関連付けて一単位の探査データとして記憶される。そして、オペレータは、例えば、測定中断スイッチ等を押し、一方向からの最初の移動操作の測定を終了させる。以降、レーダ本体2を、図7に示すように、その走査軌跡が格子状になるように略直交する二方向(A方向及びB方向)から移動操作して各走査軌跡上で測定を行う。この各測定の際に、記憶部8は、図8に示す探査データの管理イメージ図に示すように、受信波を受信した受信時刻と、その時のAスコープデータと二次元位置データと移動方向情報とを関連付けて、一単位の探査データとして探査位置毎に記憶する。ここで、画像データ生成部9は、各走査軌跡上の測定毎に、Bスコープデータを生成し、記憶部8は、Bスコープデータと、移動方向情報と、例えば、移動操作の開始点の位置の二次元位置データとを関連付けて記憶する。表示部10は、このBスコープデータに基づいて各走査軌跡上の測定断面での埋設物11の探査結果の二次元画像を表示する。この二次元画像は、例えば、外部のプリンター等を介して印刷される。そして、オペレータは、記憶部8にBスコープデータと関連付けて記憶された移動方向情報と二次元位置データに基づいて、印刷された各二次元画像が実際の探査エリアのどの位置のどの方向の断面の画像であるかを把握し、埋設物11の埋設位置を特定する。なお、上記説明においては、レーダ本体2の走査軌跡が、従来と同様に、格子状になるようにレーダ本体2を略直交する二方向から移動操作させた場合で説明したが、これに限らず、図示省略するが、各一方向の走査軌跡がランダムな方向であってもよい。
【0025】
このような構成により、本実施形態における地中レーダ1によれば、Aスコープデータと、二次元位置データと、移動方向情報とを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶することができるため、オペレータは、Aスコープデータと二次元の位置情報と移動方向情報とを紐付けして管理するデータ管理作業を行う必要がない。また、レーダ本体2を探査エリア内でランダムに移動操作しても、方向測定部4によって移動方向情報を取得できるので、従来のように格子状に描かれた測定線上を移動操作させる必要もない。したがって、探査エリア内の路面等に格子状に測定線を描く作業も当然に不要となる。このようにして、地中レーダ1のオペレータの探査作業を効率化することができる。
【0026】
なお、上記実施形態において、位置測定部3は、GPSを用いた場合で説明してが、これに限らず、レーザ測位計やカメラ(車載カメラ式、天井カメラ式)を用いた構成であってもよい。図示省略するが、レーザ測位計を用いる場合は、例えば、2つの回転レーザを探査エリア外に設置して、レーダ本体2に向けてレーザ光を投光して、三角測量によりレーダ本体2の位置を測定し、その測定結果を記憶部8に出力可能な構成にしたり、また、レーダ本体2の上部に1つの回転レーザを設置し、探査エリア外に2つのポール等を設置して、ポール等に向けてレーザ光を投光して、上記同様に三角測量によりレーダ本体2の位置を測定する。また、カメラを用いた場合は、例えば、レーダ本体2にカメラを搭載(車載カメラ式)して、レーダ本体2の移動の際に地面を連続的に撮影して、撮影画像に基づいて、予め定めた基準位置からレーダ本体2がどれだけ移動したかを測定する構成にしたり、探査エリア全体を撮影可能にカメラを配置(天井カメラ式)して、レーダ本体2を撮像して、レーダ本体2の位置を測定する構成にしてもよい。
【0027】
図9は、本発明による地中レーダの第2実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、第1データ選択部12と第2データ選択部13とを備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。
【0028】
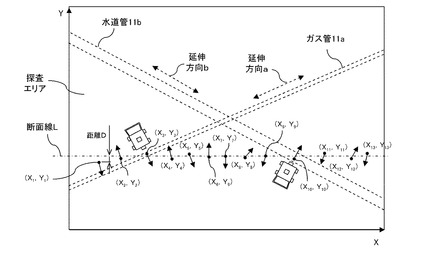
上記第1データ選択部12は、探査エリア内で一本の断面線Lを設定し、記憶部8に記憶された各探査データの中から、断面線L上の位置に略一致する二次元位置データを有する探査データを選択するものである。具体的には、第1データ選択部12は、例えば、レーダ本体2が探査エリア全体を網羅するように移動操作された場合、後述する図10に示すように、記憶部8に記憶された各探査データの中から、断面線Lとの距離Dが予め定める許容距離範囲内の位置の二次元位置データ(X1,Y2)〜(X13,Y13)を有する探査データを選択する。選択された各探査データは、第2データ選択部13に出力される。
【0029】
図10は、図7と同じ埋設状況において、埋設物11を探査する状況を表している。本実施形態では、配管等の埋設物11の正確な埋設位置については不明だが、調査前にガス管11aが延伸方向aの方向に延伸し、水道管11bが延伸方向bの方向に延伸して埋設されていることが分かっているものとし、探査エリアの図面略左半分においては、ガス管11aの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させ、探査エリアの図面略右半分においては、水道管11bの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させている。図10において、点で示した位置が、Aスコープデータが得られた位置の一例であり、矢印がその点をレーダ本体2が通過した時の、レーダ本体2の移動方向を示している。なお、図10においては、図の簡略化のため、探査エリアに設定された断面線L上及びその近傍の点のみ示したが、実際は、レーダ本体2は、例えば、探査エリア全体を網羅するように移動操作されており、図に点で示した位置以外の点でもAスコープデータを含む探査データが記憶部8に記憶されている。
【0030】
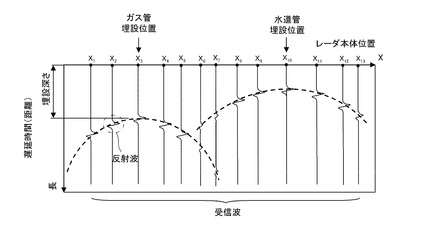
図11は、設定された断面線Lに沿った各探査位置(X1,Y2)〜(X13,Y13)において受信アンテナ部61が受信した反射波の波形を表示した図である。このように、レーダ本体2を移動操作して、複数の探査位置で探査データを得たあとに、探査エリアの所望の断面線Lに沿った断面における埋設状況を調査することができる。
【0031】
上記第2データ選択部13は、レーダ本体2の移動方向の優先方向を設定し、第1データ選択部12によって選択された各探査データの中から、設定した優先方向と略平行する移動方向情報を有する探査データを選択するものである。この選択された探査データは、画像データ生成部9に出力される。
【0032】
また、本実施形態においては、画像データ生成部9は、第2データ選択部13によって選択された探査データのAスコープデータと二次元位置データに基づき、第1データ選択部12によって設定された断面線Lに沿った探査エリアの断面における埋設物11の埋設状況を表示するBスコープデータを生成するように構成されている。画像データ生成部9は、第2データ選択部13から出力された各探査データを用いて、第1実施形態と同様にしてBスコープデータを生成する。
【0033】
次に、このように構成された地中レーダ1の動作を、図10,図12及び図13に基づいて説明する。なお、第1実施形態と同じ動作については、説明を簡略化する。
【0034】
まず、測定動作について説明する。オペレータは、例えば、測定開始スイッチ等を押して、電磁波送信部5からの電磁波の送出を開始させると共に、探査エリア全体を網羅するようにレーダ本体2を移動操作する。この際、オペレータは、例えば、探査エリアの図面略左半分においては、ガス管11aの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させ、探査エリアの図面略右半分においては、水道管11bの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させる。この移動の際、電磁波受信部6は、電磁波送信部5から送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を各位置で受信し、信号処理部7は、ノイズ等の不要成分除去後の各位置の受信波の信号をAスコープデータとして記憶部8へ出力する。このAスコープデータは、二次元位置データと移動方向情報と関連付けて一単位の探査データとして記憶される。そして、オペレータは、例えば、探査エリア全体を網羅するようにレーダ本体を移動操作し終わると、測定中断スイッチ等を押し測定が完了する。
【0035】
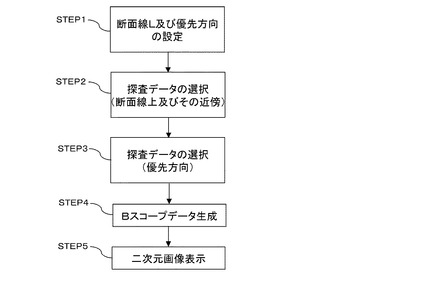
次に、画像表示動作について、図12等に基づいて説明する。まず、オペレータ等の入力によって断面線L及び優先方向が設定される(STEP1)。次に、第1データ選択部12は、設定された断面線L上の位置に略一致する二次元位置データを有する探査データを記憶部8から読込み第2データ選択部13に出力する(STEP2)。そして、第2データ選択部13は、第1データ選択部12から出力された各探査データの中から、優先方向と略平行する移動方向情報を有する探査データを選択し、その探査データを画像データ生成部9に出力する(STEP3)。そして、画像データ生成部9は、例えば、図10に示すように、第1データ選択部12によって二次元位置データ(X1,Y1)〜(X13,Y13)を有する探査データが選択されている場合に、優先方向として、ガス管11aの延伸方向と略直交する方向が設定されているときは、二次元位置データ(X1,Y1)〜(X5,Y5)を有する探査データを用いて、設定された断面線LについてのBスコープデータを生成する。また、画像データ生成部9は、優先方向として、水道管11bの延伸方向と略直交する方向を設定されているときは、二次元位置データ(X8,Y8)〜(X13,Y13)を有する探査データを用いて、Bスコープデータを生成し表示部10に出力する(STEP4)。最後に、表示部10は、例えば、二次元位置データ(X1,Y1)〜(X5,Y5)を有する探査データを用いて生成されたBスコープデータが出力された場合、設定された断面線Lに沿った探査エリアの断面において、図13に示すように、ガス管11aのみが強調された埋設状況を表す二次元の画像を表示する。また、表示部10は、二次元位置データ(X8,Y8)〜(X13,Y13)を有する探査データを用いて生成されたBスコープデータが出力された場合、図示省略するが、水道管11bのみが強調された埋設状況を表す二次元の画像を表示する(STEP5)。
【0036】
このような構成により、本実施形態における地中レーダ1によれば、探査エリア全体を網羅するようにレーダ本体2を移動操作して、複数の探査位置において探査データを得たあとに、探査エリアの所望の断面線Lに沿った断面における埋設状況を調査することができる。また、異なる方向に延伸して埋設された埋設物11が複数ある場合に、第2データ選択部13により移動方向の優先方向を設定することで、優先して表示部10に表示する埋設物11を設定することができるため、意図する方向の埋設物11の埋設状況のみを表示することができ、視認性のよい画像を得ることができる。
【0037】
なお、本実施形態において、画像データ生成部9は、第1データ選択部12によって設定された断面線Lに沿った探査エリアの断面における埋設物11の埋設状況を表示するBスコープデータを生成する構成で説明したが、これに限らず、第1実施形態と同様に、レーダ本体2を一方向に移動させたその走査軌跡に沿った探査エリアの断面における埋設物の埋設状況を表示するBスコープデータを生成することもできる。
【0038】
図14は、本発明による地中レーダの第3実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、方向通知部14を備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。また、地中レーダ1の動作については、以下に説明する方向通知部14の動作以外は同じであるため、説明を省略する。
【0039】
上記方向通知部14は、記憶部8に二次元位置データが略一致する探査データが複数ある場合は、その複数ある各探査データ内のAスコープデータに基づく受信波の強度が一番大きい探査データを選択し、選択した探査データの移動方向情報に基づき、埋設物11の延伸方向を通知するものである。
【0040】
一般的に、略一致する探査位置(X,Y)であっても、その探査位置で電磁波送信部5から送出される電磁波の電界の偏波方向が異なると、電磁波受信部6で受信される反射波の強度(受信波の強度)も異なるという特性がある。受信波の強度は、図2及び図3に示すように、延伸方向と偏波方向が平行なときが一番強く、この状態から、図4に示すように、延伸方向と偏波方向が交差しこの交差内角θが大きくなるに従って弱くなり、図示省略するが、延伸方向と偏波方向が直交したところで一番弱くなる。したがって、記憶部8に二次元位置データが略一致する探査データが複数ある場合は、受信波強度が一番強いAスコープデータが得られた時の偏波方向が求まれば、配管等の埋設物11の概略の延伸方向を求めることができる。
【0041】
ここで、送信アンテナ部53は、図3及び図4に示すように、送出する電磁波の電界の偏波方向がレーダ本体2の移動方向と直交するようにレーダ本体2に固定されているため、方向測定部4によりレーダ本体2の移動方向を測定することで、電磁波の電界の偏波方向を求めることができる。このように、移動方向を測定することにより、電界の偏波方向を求めて、配管等の埋設物11の概略の延伸方向を求めることができる。
【0042】
方向通知部14は、具体的には、選択した探査データの移動方向情報(レーダ本体2の移動方向の情報)に基づき、埋設物11の延伸方向の情報を生成し、表示部10に延伸方向の情報を出力し、オペレータ等に表示部10を介して延伸方向を通知する。これにより、配管等の埋設物11の概略の延伸方向を通知することができる。
【0043】
また、例えば、配管等の埋設物11の埋設状況を調査する際に、探査エリアのある探査位置の直下に埋設物11が埋設されていることについては分かっているが、その埋設物11の延伸方向については不明でありその延伸方向を正確に知りたい場合がある。このような場合、図3及び図4に示したように、その特定の探査位置(X,Y)又は近傍を複数の方向から通過するようにレーダ本体2を移動操作させて、記憶部8にその探査位置(X,Y)又はその近傍の位置を含む複数の探査データを記憶させる。方向通知部14は、例えば、上記のようにレーダ本体2を移動操作して、記憶部8に記憶された各探査データ内のAスコープデータに基づく受信波の強度をそれぞれ読取って、強度が一番大きい探査データを選択し、その探査データ内の移動方向情報に基づき、その探査位置における埋設物11の延伸方向を通知する。これにより、配管等の埋設物11の延伸方向を精度よく通知することができる。
【0044】
このような構成により、本実施形態における地中レーダ1によれば、配管等の埋設物11の延伸方向を通知することが可能な地中レーダ1を提供することができる。
【0045】
なお、本実施形態で説明した方向測定部4及び方向通知部14を設けて埋設物の延伸方向を通知する構成は、第1実施形態の地中レーダ1に限らず、図9に示した第2実施形態の地中レーダ1にも適用することができる。
【0046】
図15は、本発明による地中レーダの第4実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、データ不足通知部15を備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。また、地中レーダ1の動作については、以下に説明するデータ取得状況通知部15の動作以外は同じであるため、説明を省略する。
【0047】
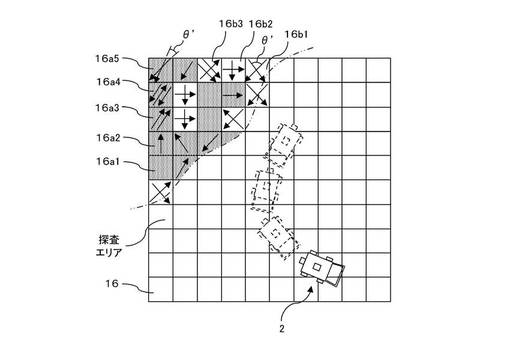
上記データ取得状況通知部15は、探査エリアを、後述する図16に示すように、例えば、マトリックス状に設定された複数のセル16に区分し、各セル16内の探査データの取得状況を通知するものである。データ取得状況通知部15は、例えば、セル16内の探査データが2つ未満であるセル16と、セル16内の探査データが2つ以上あり各探査データの移動方向が略平行であるセル16とをデータ不足セル16a(例えば、図16に示すセル16a1〜16a5等)と判定し、このデータ不足セル16aの位置を通知するように構成されている。
【0048】
データ取得状況通知部15は、具体的には、例えば、表示部10にデータ不足セル16aの位置情報を出力し、探査データが不足しているセル16の位置を識別可能に表示させることで、探査データの取得状況をオペレータ等に通知する。図16は、オペレータが探査エリア全体を網羅するように意識して、ランダムにレーダ本体2を移動操作している最中に、表示部10が、データ不足セル16aをハイライト(図中ハッチングさせた部分)させて表示した表示例である。図16では、図の簡略化のため、図中二点鎖線から左側のエリアにのみ、データ不足セル16aの表示例を示したが、実際は、探査エリア全体で表示されている。図16において、セル16内に示した矢印は、そのセル16で区分されるエリア内の位置に対応する二次元位置データを有する探査データに基づくレーダ本体2の移動方向を示し、同じセル16内の矢印の本数は、そのセル16内の探査データの数を表している。
【0049】
データ不足セル16aとは、具体的には、例えば、図16に示すように、そのセル16内の探査データが、セル16a1のように全くないセルや、セル16a2のように1つしかないセルや、セル16a3やセル16a4のように探査データが2つ以上あるが、各移動方向が平行のセルや、セル16a5のように互いの移動方向が交差しているが、その交差内角θ’が予め設定する角度未満であり各移動方向が略平行とみなせるセルのことを示している。セル16a1をデータ不足セル16aとして通知するのは、オペレータが探査エリア全体を網羅するように意識してレーダ本体2を移動操作しても、そのセルを全く探査できていない場合があるためである。また、セル16a2〜16a5をデータ不足セル16aとして通知するのは、移動方向が一方向であったり、略平行であったりすると埋設物11の上をレーダ本体2が通過できず、埋設位置を正確に特定することができない場合があるためである。
【0050】
このような構成により、本実施形態における地中レーダ1によれば、レーダ本体2が移動操作されている際に探査データの取得状況を、例えば、探査データが不足しているデータ不足セルの位置を表示部10に表示等することにより、リアルタイムに通知することができるため、オペレータは、その通知に基づいて、探査データが不足している箇所を探査することができ、効率的に探査作業を行うことができる。このように、本実施形態における地中レーダ1は、探査データの不足が生じないように、オペレータに対してレーダ本体2の移動操作位置をナビゲーション可能な地中レーダ1を提供することができる。また、上記実施形態のように、移動方向をセル16内に矢印で示して探査データの取得状況を通知する構成にすることにより、オペレータは、データ不足セル16aにおいてどの方向にレーダ本体2を移動操作すればよいのかが分かる。このようにして、本実施形態における地中レーダ1は、オペレータに対してレーダ本体2の移動操作位置並びに方向をナビゲーション可能な地中レーダ1を提供することができる。
【0051】
なお、上記実施形態において、データ取得状況通知部15は、データ不足セル16aの位置を表示部に表示する構成で説明したが、これに限らず、データ不足セル16a以外のセル16、すなわち、データが充足しているデータ充足セル16b(例えば、図16に示すセル16b1〜16b3等)の位置を通知する構成としてもよく、また、データ不足セル16aとデータ充足セル16bを例えばセルの色等を変えてそれぞれ通知可能に構成してもよい。このように、データ充足セル16bの位置を通知することにより、探査エリアの偏った場所で、過多な探査が行われないようにすることができるため、無駄な移動操作作業を抑制することができる。また、データ取得状況通知部15は、上記のようにデータ不足セル16a及びデータ充足セル16bの少なくとも一方の位置を通知する構成において、データ充足セル16bにおいて、そのセル内の探査データが、さらに記憶部8に記憶された場合、このデータ充足セル16bをデータ過多セル16cと判定し、このデータ過多セル16cの位置も通知するように構成してもよい。例えば、図16に示すセル16b3がデータ過多セル16cである。
【0052】
また、上記実施形態においては、データ不足セル16a内に移動方向を矢印で表示して通知した例で説明したが、移動方向は通知しなくてもよい。この場合であっても、オペレータはデータ不足セル16aの位置を把握することができる。
【0053】
また、本実施形態で説明したデータ取得状況通知部15を設けて探査データの取得状況を通知する構成は、第1実施形態の地中レーダ1に限らず、第2及び第3実施形態の地中レーダ1にも適用することができる。
【0054】
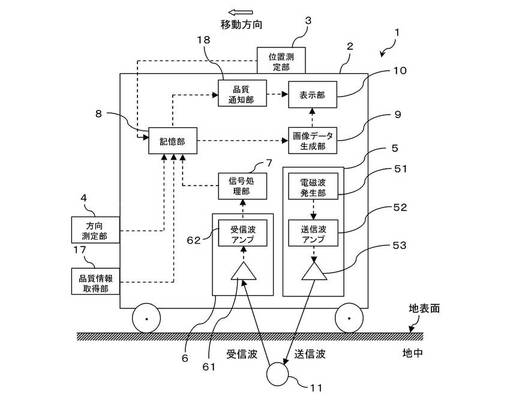
図17は、本発明による地中レーダの第5実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、品質情報取得部17と品質通知部18とを備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。また、地中レーダ1の動作については、以下に説明する品質情報取得部17及び品質通知部18の動作以外は同じであるため、説明を省略する。
【0055】
上記品質情報取得部17は、探査データの品質に関するデータ品質情報を、探査位置毎に取得するものである。このデータ品質情報は、記憶部8に探査データと関連付けて記憶される。品質情報取得部17は、具体的には、例えば、図示省略するが、レーダ本体2の周囲の雑音強度を測定する手段と、レーダ本体の移動速度を測定する手段と、レーダ本体2の振動を測定する手段と、レーダ本体2の傾きを測定する手段と、オペレータ等によってデータ品質情報を入力可能な手段とを備え、これらの測定手段及び入力手段により各種のデータ品質情報を取得するように構成されている。雑音強度を測定する手段は、例えば、電磁波送信部5から送出された電磁波を受信可能なものであり、受信した電磁波に基づく受信波形のS/Nを求めることが可能に構成されたものであり、電磁波受信部6を兼用し、信号処理部7でS/Nを求めるように構成してもよいし、電磁波受信部6及び信号処理部7とは別に設けたものであってもよい。また、移動速度を測定する手段は、例えば、レーダ本体2の車輪や車軸の回転を測定するエンコーダであり、振動を測定する手段は、例えば、振動計や加速度計やジャイロである。そして、傾きを測定する手段は、例えば、ジャイロである。振動及び傾きをジャイロで構成する場合は、方向測定部4のジャイロと兼用してもよい。データ品質情報を入力可能な手段は、オペレータ等によって認識された探査データの品質の良し悪しの程度を、データ品質情報として入力可能に構成されたものであり、例えば、入力ボタン等を備えて構成したものである。この探査データの品質の良し悪しの程度は、品質が悪い場合を1、良い場合を0とした2値化された情報であってもよいし、オペレータ等のアナログ的な感覚を連続的な数値若しくはそれに類する形式により表した情報であってもよい。例えば、入力するデータ品質情報をアナログ的な感覚とする場合、データ品質情報を入力可能な手段は、レバー等を備えて構成するとよい。
【0056】
上記品質通知部18は、品質情報取得部17によって取得されたデータ品質情報に基づき、探査データの品質をランク付けし、このランクが予め設定した許容ランク未満で有る場合は、許容ランク未満で有る探査データの探査位置を通知するように構成されている。品質通知部18は、具体的には、例えば、記憶部8に探査データ毎に関連付けて記憶された各種のデータ品質情報を読み込み、読込んだデータ品質情報の種類毎に予め定めた評価方法に基づき点数を付けし、探査データの総合的な品質をデータ品質情報の種類毎に付けられた点数を加算した値でランク付けする。例えば、雑音強度については、S/Nが大きい程品質がよいので点数を高く付け、移動速度については、速度が過度に速いと精度よく位置を特定できないため品質が悪いので点数を低く付け、レーダ本体の振動及び傾きについては、受信アンテナ部61が動くと地表面までの距離が変動してしまうため品質が悪いので点数を低く付け、品質の良し悪しの程度については、悪い場合の点数を低く付け、これらの点数によってランク付けする。このランクが許容ランク未満で有る場合は、その探査データは信頼性に劣るデータであると判定し、その探査データの探査位置の情報を表示部10に出力し、表示部10を介して品質不良の探査データの箇所をオペレータに通知する。なお、探査位置が略一致し、かつ、移動方向情報も略一致する探査データが複数ある場合は、これらのAスコープデータを加算することによりS/Nが向上し、その探査位置における探査データの品質が良く、探査の重複回数が多いほど品質がよくなるため、探査の重複回数に応じた所定の点数を雑音強度に基づく点数に加算して、ランク付けを行ってもよい。また、ランク付けは、上記のように、データ品質情報の種類毎に付けられた点数を加算した値で総合的に行う場合に限らず、データ品質情報の種類毎に個別に行ってもよい、この場合、品質不良の種類を通知するようにしてもよい。
【0057】
このような構成により、本実施形態における地中レーダ1によれば、品質情報取得部17によって取得されたデータ品質情報を探査データと関連付けて記憶することができるため、地中レーダのオペレータは、データ品質情報により、探査データの信頼性を把握することができる。これにより、記憶部8に記憶されている探査データの中に信頼性に劣る探査データがある場合は、その探査データを取得した位置での再度の探査をオペレータに促すことができるため、全体的な探査データの品質を向上することができる。また、本実施形態は、データ品質情報に基づき、探査データの品質をランク付けし、このランクが予め設定した許容ランク未満で有る場合は、許容ランク未満で有る探査データの探査位置をオペレータに通知することができるため、オペレータはその通知に基づき容易に再探査することができる。
【0058】
なお、本実施形態において、品質情報取得部17は、レーダ本体2の周囲の雑音強度を測定する手段、レーダ本体2の移動速度を測定する手段、振動を測定する手段及び傾きを測定する手段、オペレータ等によってデータ品質情報を入力可能な手段をそれぞれ備えたものとして説明したが、これに限らず、例えば、雑音強度を測定する手段だけ備えて構成されていてもよい。品質情報取得部17は、雑音強度、移動速度、振動、傾きを測定する手段、データ品質情報を入力可能な手段のうち少なくとも一つを備えていればよい。
【0059】
また、本実施形態においては、品質通知部18を備えた場合で説明したが、品質通知部18は設けなくてもよい。この場合であっても、例えば、前述したようにデータ品質情報に基づき探査データの信頼性をオペレータに把握させることで、信頼性に劣る探査データの探査位置での再度の探査をオペレータに促して、全体として品質のよい探査データとすることができる。
【0060】
また、本実施形態で説明した品質情報取得部を設けて探査データの品質を向上させる構成は、第1実施形態の地中レーダ1に限らず、前述した第2〜第4実施形態の地中レーダ1にも適用することができる。第2実施形態に適用する場合、例えば、品質のランクが予め設定した許容ランク未満で有る探査データの情報を品質通知部18から第1データ選択部12又は第2データ選択部13に出力し、第1データ選択部12又は第2データ選択部13は、Bスコープデータを生成するための探査データとして許容ランク未満で有る探査データを排除するように構成したり、第2データ選択部13によって選択された探査データの中に品質のランクが悪い探査データがあった場合に、その品質ランクが悪い探査データと探査位置が略一致する探査データがある場合には、優先方向と略一致しないが品質ランクの良い探査データを優先して選択するように第2データ選択部13を構成したりするとよい。これらにより、品質のよいBスコープデータを生成することができるため、精度のよい解析を行うことができる。また、本実施形態において、地中レーダ1は、方向測定部4を備える場合で説明したが、方向測定部4は備えなくてもよい。この場合であっても、探査データの品質を向上することができる。
【0061】
また、上記全ての説明において、Aスコープデータは、移動方向情報やデータ品質情報と紐つけされた場合で説明したが、これらに限らず、さらに、例えば、カメラによってレーダ本体2の周辺や地表面の画像や映像を撮像し、それらの撮像データとも関連付けて記憶させるようにしてもよい。これにより、オペレータが探査データを解析する際に実地状況も加味して解析することができる。
【符号の説明】
【0062】
1 地中レーダ
2 レーダ本体
3 位置測定部
4 方向測定部
5 電磁波送信部
6 電磁波受信部
8 記憶部
9 画像データ生成部
11 埋設物
12 第1データ選択部
13 第2データ選択部
14 方向通知部
15 データ取得状況通知部
16 セル
17 品質情報取得部
18 品質通知部
【技術分野】
【0001】
本発明は、地中の埋設物を探査する地中レーダに関し、詳しくは、地中レーダのオペレータの探査作業の効率化や探査データの品質を向上することができる地中レーダに係るものである。
【背景技術】
【0002】
道路工事や鉄道軌道の改良工事等において、例えば、コンクリート等の掘削作業を伴って行うことがある。この様な掘削作業に先立って、ガス管や電力ケーブル等の既設の設備の埋設状況を調査して、作業の安全確保を図ることがある。この様な埋設状況の調査は、一般的に、オペレータが、地中レーダを移動操作し、得られた探査データを解析することによって行われている。
【0003】
ここで、この種の地中レーダとしては、例えば、特許文献1等に記載されたものがある。特許文献1に記載された地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された電磁波の反射波を受信する電磁波受信部とを備え、電磁波受信部によって受信された電磁波に基づく受信波の受信波データ(以下において、「Aスコープデータ」と言う)等により地中に埋設された埋設物を探査する構成である。そして、一般的に、この種の地中レーダは、例えば、レーダ本体に設けた車輪の回転数を読取って移動距離を測定し、得られた移動距離データとAスコープデータに基づいて、地中レーダの移動方向の距離を横軸とし地中深さ(時間)を縦軸とする二次元の画像データ(以下において、「Bスコープデータ」と言う)を生成するように構成されている。このような一般的な地中レーダを用いて埋設状況を調査する場合、オペレータは、探査エリアの路面等にチョーク等で格子状に測定線を描き、その各測定線に沿って地中レーダを移動操作して、埋設物の探査を行う。この測定の際、オペレータは、測定線の各位置で得られるAスコープデータが、どの方向のどの測定線上のデータなのかが後で分かるような情報をメモしておく。そして、オペレータは、メモした情報に基づいてBスコープデータに基づく二次元画像を測定線順に並べて、埋設物の埋設状況を解析し、既に描かれている測定線を基準にして路面上等に埋設位置をマーキングしたり、埋設物の埋設位置を描いた図面等を添付した報告書を作成したりしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−151603号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来、この種の地中レーダを用いて埋設状況を調査する場合、オペレータは、探査エリア内の路面等に格子状に測定線を描いたり、各測定線に沿って地中レーダを移動操作したときに、その測定線の各位置で得られるAスコープデータが、どの方向のどの測定線上のデータなのかが後に分かるように、例えば、測定線の位置とレーダ本体の移動方向の情報をメモすることによりAスコープデータを取得した時のレーダ本体の2次元的な位置と移動方向とAスコープデータとを紐つけしてデータ管理したりしなければならず、探査作業の作業負荷が高い。このように、オペレータによる探査作業は、上記のような各測定線を描く作業や、Aスコープデータの管理作業や、レーダ本体の移動操作作業や、取得したAスコープデータやBスコープデータ等の探査データの解析作業等多岐にわたっており、オペレータへの負荷が高いため、探査作業の効率化が望まれている。また、受信する電磁波にノイズが含まれる場合もあり、探査データの品質の向上も求められている。
【0006】
そこで、本発明は上記課題に着目し、オペレータの探査作業の効率化や探査データの品質を向上することができる地中レーダを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明による請求項1に係る地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、前記レーダ本体の移動方向の情報を取得する方向測定部と、前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データと、前記方向測定部によって取得された前記移動方向情報とを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、を備えて構成する。
【0008】
また、上記目的を達成するために、本発明による請求項7に係る地中レーダは、地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データとを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、を備えると共に、前記探査データの品質に関するデータ品質情報を、前記探査位置毎に取得する品質情報取得部を備え、前記記憶部は、前記探査データと関連つけて前記データ品質情報を記憶する構成とする。
【発明の効果】
【0009】
本発明による請求項1に係る地中レーダによれば、電磁波受信部によって受信した電磁波に基づく受信波データと、位置測定部によって取得された二次元位置データと、方向測定部によって取得された移動方向情報とを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶することができるため、地中レーダのオペレータは、受信波データ(Aスコープデータ)と二次元の位置情報と移動方向情報とを紐付けして管理するデータ管理作業を行う必要がない。また、レーダ本体を探査エリア内でランダムに移動操作しても、方向測定部によって移動方向情報を取得できるので、格子状に描かれた測定線上を移動操作させる必要もない。したがって、探査エリア内の路面等に格子状に測定線を描く作業が不要となる。このようにして、地中レーダのオペレータの探査作業を効率化することができる地中レーダを提供することができる。
【0010】
本発明による請求項7に係る地中レーダによれば、電磁波受信部によって受信した電磁波に基づく受信波データと、位置測定部によって取得された二次元位置データとを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶し、品質情報取得部によって取得された探査データの品質に関するデータ品質情報を探査データと関連付けて記憶することができるため、地中レーダのオペレータは、データ品質情報により、探査データの信頼性を把握することができる。これにより、記憶部に記憶されている探査データの中に信頼性に劣る探査データがある場合は、その探査データを取得した位置での再度の探査をオペレータに促すことができるため、全体的な探査データの品質を向上することができる。
【図面の簡単な説明】
【0011】
【図1】本発明による地中レーダの第1実施形態を示す概略構成図である。
【図2】上記実施形態の地中レーダを用いて埋設物を探査する状況を説明する図で、探査エリアの一部を側面から示した図である。
【図3】埋設部の延伸方向と直交する方向からレーダ本体を移動操作した状況を示す図で、探査エリアの一部の上面図である。
【図4】埋設部の延伸方向と斜めに交差する方向からレーダ本体を移動操作した状況を示す図で、探査エリアの一部の上面図である。
【図5】電磁波受信部の各受信波形を示した図である。
【図6】レーダ本体の移動方向に沿った断面のBスコープデータに基づき表示部が表示する画像表示例を示す図である。
【図7】上記実施形態の地中レーダを用いて埋設物を探査する状況を説明する図で、探査エリア全体の上面図である。
【図8】記憶部における探査データの管理イメージ図である。
【図9】本発明による地中レーダの第2実施形態を示す概略構成図である。
【図10】上記第2実施形態の地中レーダを用いて埋設物を探査する状況を説明する図で、探査エリア全体の上面図である。
【図11】断面線に沿った各位置における受信波の波形を表示した図である。
【図12】上記第2実施形態の地中レーダの画像表示の動作フロー図である。
【図13】上記第2実施形態の表示部の画像表示例を示す図である。
【図14】本発明による地中レーダの第3実施形態を示す概略構成図である。
【図15】本発明による地中レーダの第4実施形態を示す概略構成図である。
【図16】上記第4実施形態の表示部の表示例である。
【図17】本発明による地中レーダの第5実施形態を示す概略構成図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は本発明による地中レーダの第1実施形態を示す構成図である。
図1において、本実施形態の地中レーダ1は、レーダ本体2と、位置測定部3と、方向測定部4とを備えて構成され、レーダ本体2は、電磁波送信部5と、電磁波受信部6と、信号処理部7と、記憶部8と、画像データ生成部9と、表示部10とを備えて構成されている。
【0013】
上記レーダ本体2は、前述したように電磁波送信部5と電磁波受信部6等を備え、電磁波送信部5によって地中に向けて電磁波を送出し、電磁波受信部6によって受信された電磁波に基づく受信波の受信波データ(以下において、「Aスコープデータ」と言う)により、地中に埋設された埋設物11の埋設状況を探査する本体となるものである。レーダ本体2は、図1に示すように、例えば、その底部に車輪が取り付けられており、オペレータによってレーダ本体2を容易に移動操作できるようになっている。埋設物11は、例えば、金属管や塩化ビニール管等であり、図2及び図3に示すように、その延伸方向が、レーダ本体2の移動方向と直交する(図2においては紙面前後方向)場合や、図4に示すように、レーダ本体2の移動方向と斜めに交差する場合や、図示省略するがレーダ本体2の移動方向と平行な場合等様々な場合がある。また、レーダ本体2を探査エリア内でランダムな方向で移動操作した場合等においては、レーダ本体2の移動方向と埋設物11の延伸方向との関係は、探査エリア内の場所によって異なる場合がある。
【0014】
上記位置測定部3は、埋設物11の探査エリアでのレーダ本体2の二次元的な位置を測定するものである。位置測定部3は、例えば、GPS(Global Positioning System:全地球測位システム)を用いてレーダ本体2の二次元的な位置を測定するように構成されており、図1に示すように、レーダ本体2の上面にGPS受信機を設けて構成されている。この位置測定部3によって得られるレーダ本体2の二次元位置データは、後述するように、その位置で電磁波受信部6が受信した受信波の受信波データ(Aスコープデータ)と関連付けて記憶部8に記憶される。
【0015】
上記方向測定部4は、レーダ本体2の移動方向を測定するものであり、例えば、方向を測定可能な一般的なジャイロで構成されている。この方向測定部4によって測定した移動方向の情報は、例えば、レーダ本体2が移動操作されている方向を方位で示した情報であり、後述するように、電磁波受信部6が取得したAスコープデータと関連付けて記憶部8に記憶される。
【0016】
上記電磁波送信部5は、図1に示すように、電磁波(送信波)を地中に向けて送出するものであり、電磁波を発生する電磁波発生部51と、電磁波発生部51から発生した電磁波の出力を増幅させる送信波アンプ52と、増幅された電磁波を地中に向けて送出する送信アンテナ部53とを備えている。
【0017】
上記電磁波受信部6は、送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を受信して、出力を増幅させるもので、図1に示すように、反射された電磁波を受信する受信アンテナ部61と、受信した電磁波の出力を増幅させる受信波アンプ62とを備えている。受信波アンプ62で増幅された信号は、信号処理部7に出力される。
【0018】
上記信号処理部7は、受信波アンプ62から出力される信号を処理する一般的なものであり、図示省略するが、例えば、受信波の高調波ノイズ等の不要成分を除去する波形処理部を備えている。信号処理部7で処理されたAスコープデータは、受信波が受信された際に位置測定部3によって得られるレーダ本体2の二次元位置データ及び方向測定部4によって得られる移動方向情報と関連付けて記憶部8に記憶される。
【0019】
ここで、図2は、例えば、配管等の埋設物11の正確な埋設位置については不明だが、埋設物11の延伸方向(図2の紙面前後方向)については予め分かっている場所において、レーダ本体2を埋設物11の延伸方向と直交する方向(図2の左右方向)から一方向に移動させて、埋設物11を探査する状況を表している。また、図5は、図2及び図3の状況において、電磁波送信部5から電磁波をこの一方向の移動操作中に複数の位置で送出した場合に、受信アンテナ部61が各位置において受信した反射波(受信波)の波形を表示した図である。図5の縦軸は電磁波を送出してから反射波が受信されるまでの遅延時間を表し、下に行くほど、遅延時間が長く、アンテナと埋設物11の距離が遠いことを示し、上に行くほど、遅延時間が短く、距離が近いことを示す。図5に破線で示すように、アンテナと埋設物11の距離が徐々に近くなり、その後遠くなるような場合、距離が一番近くなったところが埋設物11の真上であることを示し、この時の探査エリアにおけるレーダ本体2の二次元的な位置は位置測定部3によって測定されるため、埋設物11の真上の位置、すなわち、埋設位置が分かる。また、距離が一番近くなったところの距離は、埋設物11の地表面からの埋設深さを示す。したがって、埋設物11の上を横切るようにして、レーダ本体2を移動させて探査すると埋設物11の正確な埋設位置及び埋設深さを特定することができる。
【0020】
上記記憶部8は、探査エリア内でレーダ本体2を移動させて、電磁波受信部6によって受信した電磁波に基づくAスコープデータと、位置測定部3によって取得された二次元位置データと、方向測定部4によって取得された移動方向情報とを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶するものである。このように構成することにより、記憶部8は、例えば、図示省略するが、オペレータが探査エリア内でレーダ本体2をランダムな方向で移動操作させたとしても、後述する図8に示す探査データの管理イメージ図に示すように、受信波を受信した受信時刻と、その時のAスコープデータと二次元位置データと移動方向情報とを容易に関連付けて管理することができる。本実施形態において、記憶部8は、画像データ生成部9によって、一方向の移動操作の測定毎に生成される後述するBスコープデータが、どの方向のどの位置で移動操作したときのデータなのかが後で分かるように、Bスコープデータと、移動方向情報と、例えば、移動操作の開始点の位置の二次元位置データとを関連付けて記憶するように構成されている。
【0021】
上記画像データ生成部9は、埋設物11の探査結果等の画像データを生成し、表示部10に画像データを出力するものである。画像データ生成部9は、レーダ本体2を、例えば、一方向に移動させ、送信アンテナ部53から電磁波をこの一方向の移動操作中に複数の位置で送出した場合に、受信アンテナ部61が各位置において受信した電磁波のAスコープデータを記憶部8から読み出し、受信強度を濃淡で表示し、さらに、各Aスコープデータと関連付けて記憶部8に記憶された二次元位置データに基づいて位置シフト(レーダ本体2の移動方向へのシフト)させた一般的な二次元の画像データ(Bスコープデータ)を、一方向の移動操作の測定毎に生成する。
【0022】
表示部10は、画像データ生成部9によって生成されたBスコープデータに基づいて埋設物11の探査結果を画像表示するものであり、例えば、ディスプレイで構成されている。ここで、図6は、図2〜図4に示すように、埋設物11の上を横切るように、レーダ本体2を一方向に移動させた場合に、Bスコープデータに基づいて表示部10が表示する画像表示例を示す図である。図6においては、横軸はレーダ本体2の移動方向の距離を示し、縦軸は地中深さ(時間)を示す。なお、図6においては、図の簡略化のため、各位置において受信強度の一番高い箇所のみ表示し、他の箇所については省略して示している。
【0023】
次に、このように構成された地中レーダ1の動作を、図7に示すように、埋設物11としてガス管11aと水道管11bが交差して埋設されている探査エリア内において、レーダ本体2をその走査軌跡(図中一点鎖線で示した線)が格子状になるように移動操作して調査する場合を例として説明する。
【0024】
まず、オペレータは、例えば、レーダ本体2の電源を入れ、測定準備ができたら、測定開始スイッチ等を押して、電磁波送信部5からの電磁波の送出を開始させると共に、レーダ本体2を一方向(例えば、図7に矢印Aで示されたA方向)に押して移動させる。この移動の際、電磁波送信部5は、電磁波を複数の位置で地中に向けて送出し、電磁波受信部6は、電磁波送信部5から送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を各位置で受信し、信号処理部7へ各受信波の信号を出力する。信号処理部7は、受信波の信号内の高調波ノイズ等の不要成分を除去しノイズ除去後の受信波の信号をAスコープデータとして、記憶部8へ出力する。このAスコープデータは、受信された際に位置測定部3よって得られる二次元位置データと、方向測定部4によって得られる移動方向情報と関連付けて一単位の探査データとして記憶される。そして、オペレータは、例えば、測定中断スイッチ等を押し、一方向からの最初の移動操作の測定を終了させる。以降、レーダ本体2を、図7に示すように、その走査軌跡が格子状になるように略直交する二方向(A方向及びB方向)から移動操作して各走査軌跡上で測定を行う。この各測定の際に、記憶部8は、図8に示す探査データの管理イメージ図に示すように、受信波を受信した受信時刻と、その時のAスコープデータと二次元位置データと移動方向情報とを関連付けて、一単位の探査データとして探査位置毎に記憶する。ここで、画像データ生成部9は、各走査軌跡上の測定毎に、Bスコープデータを生成し、記憶部8は、Bスコープデータと、移動方向情報と、例えば、移動操作の開始点の位置の二次元位置データとを関連付けて記憶する。表示部10は、このBスコープデータに基づいて各走査軌跡上の測定断面での埋設物11の探査結果の二次元画像を表示する。この二次元画像は、例えば、外部のプリンター等を介して印刷される。そして、オペレータは、記憶部8にBスコープデータと関連付けて記憶された移動方向情報と二次元位置データに基づいて、印刷された各二次元画像が実際の探査エリアのどの位置のどの方向の断面の画像であるかを把握し、埋設物11の埋設位置を特定する。なお、上記説明においては、レーダ本体2の走査軌跡が、従来と同様に、格子状になるようにレーダ本体2を略直交する二方向から移動操作させた場合で説明したが、これに限らず、図示省略するが、各一方向の走査軌跡がランダムな方向であってもよい。
【0025】
このような構成により、本実施形態における地中レーダ1によれば、Aスコープデータと、二次元位置データと、移動方向情報とを一単位の探査データとし、この探査データを探査位置毎にそれぞれ記憶することができるため、オペレータは、Aスコープデータと二次元の位置情報と移動方向情報とを紐付けして管理するデータ管理作業を行う必要がない。また、レーダ本体2を探査エリア内でランダムに移動操作しても、方向測定部4によって移動方向情報を取得できるので、従来のように格子状に描かれた測定線上を移動操作させる必要もない。したがって、探査エリア内の路面等に格子状に測定線を描く作業も当然に不要となる。このようにして、地中レーダ1のオペレータの探査作業を効率化することができる。
【0026】
なお、上記実施形態において、位置測定部3は、GPSを用いた場合で説明してが、これに限らず、レーザ測位計やカメラ(車載カメラ式、天井カメラ式)を用いた構成であってもよい。図示省略するが、レーザ測位計を用いる場合は、例えば、2つの回転レーザを探査エリア外に設置して、レーダ本体2に向けてレーザ光を投光して、三角測量によりレーダ本体2の位置を測定し、その測定結果を記憶部8に出力可能な構成にしたり、また、レーダ本体2の上部に1つの回転レーザを設置し、探査エリア外に2つのポール等を設置して、ポール等に向けてレーザ光を投光して、上記同様に三角測量によりレーダ本体2の位置を測定する。また、カメラを用いた場合は、例えば、レーダ本体2にカメラを搭載(車載カメラ式)して、レーダ本体2の移動の際に地面を連続的に撮影して、撮影画像に基づいて、予め定めた基準位置からレーダ本体2がどれだけ移動したかを測定する構成にしたり、探査エリア全体を撮影可能にカメラを配置(天井カメラ式)して、レーダ本体2を撮像して、レーダ本体2の位置を測定する構成にしてもよい。
【0027】
図9は、本発明による地中レーダの第2実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、第1データ選択部12と第2データ選択部13とを備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。
【0028】
上記第1データ選択部12は、探査エリア内で一本の断面線Lを設定し、記憶部8に記憶された各探査データの中から、断面線L上の位置に略一致する二次元位置データを有する探査データを選択するものである。具体的には、第1データ選択部12は、例えば、レーダ本体2が探査エリア全体を網羅するように移動操作された場合、後述する図10に示すように、記憶部8に記憶された各探査データの中から、断面線Lとの距離Dが予め定める許容距離範囲内の位置の二次元位置データ(X1,Y2)〜(X13,Y13)を有する探査データを選択する。選択された各探査データは、第2データ選択部13に出力される。
【0029】
図10は、図7と同じ埋設状況において、埋設物11を探査する状況を表している。本実施形態では、配管等の埋設物11の正確な埋設位置については不明だが、調査前にガス管11aが延伸方向aの方向に延伸し、水道管11bが延伸方向bの方向に延伸して埋設されていることが分かっているものとし、探査エリアの図面略左半分においては、ガス管11aの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させ、探査エリアの図面略右半分においては、水道管11bの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させている。図10において、点で示した位置が、Aスコープデータが得られた位置の一例であり、矢印がその点をレーダ本体2が通過した時の、レーダ本体2の移動方向を示している。なお、図10においては、図の簡略化のため、探査エリアに設定された断面線L上及びその近傍の点のみ示したが、実際は、レーダ本体2は、例えば、探査エリア全体を網羅するように移動操作されており、図に点で示した位置以外の点でもAスコープデータを含む探査データが記憶部8に記憶されている。
【0030】
図11は、設定された断面線Lに沿った各探査位置(X1,Y2)〜(X13,Y13)において受信アンテナ部61が受信した反射波の波形を表示した図である。このように、レーダ本体2を移動操作して、複数の探査位置で探査データを得たあとに、探査エリアの所望の断面線Lに沿った断面における埋設状況を調査することができる。
【0031】
上記第2データ選択部13は、レーダ本体2の移動方向の優先方向を設定し、第1データ選択部12によって選択された各探査データの中から、設定した優先方向と略平行する移動方向情報を有する探査データを選択するものである。この選択された探査データは、画像データ生成部9に出力される。
【0032】
また、本実施形態においては、画像データ生成部9は、第2データ選択部13によって選択された探査データのAスコープデータと二次元位置データに基づき、第1データ選択部12によって設定された断面線Lに沿った探査エリアの断面における埋設物11の埋設状況を表示するBスコープデータを生成するように構成されている。画像データ生成部9は、第2データ選択部13から出力された各探査データを用いて、第1実施形態と同様にしてBスコープデータを生成する。
【0033】
次に、このように構成された地中レーダ1の動作を、図10,図12及び図13に基づいて説明する。なお、第1実施形態と同じ動作については、説明を簡略化する。
【0034】
まず、測定動作について説明する。オペレータは、例えば、測定開始スイッチ等を押して、電磁波送信部5からの電磁波の送出を開始させると共に、探査エリア全体を網羅するようにレーダ本体2を移動操作する。この際、オペレータは、例えば、探査エリアの図面略左半分においては、ガス管11aの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させ、探査エリアの図面略右半分においては、水道管11bの延伸方向とレーダ本体2の移動方向(図中矢印で示す方向)が略直交するようにレーダ本体2を移動させる。この移動の際、電磁波受信部6は、電磁波送信部5から送出された電磁波(送信波)に基づいて反射された電磁波(受信波)を各位置で受信し、信号処理部7は、ノイズ等の不要成分除去後の各位置の受信波の信号をAスコープデータとして記憶部8へ出力する。このAスコープデータは、二次元位置データと移動方向情報と関連付けて一単位の探査データとして記憶される。そして、オペレータは、例えば、探査エリア全体を網羅するようにレーダ本体を移動操作し終わると、測定中断スイッチ等を押し測定が完了する。
【0035】
次に、画像表示動作について、図12等に基づいて説明する。まず、オペレータ等の入力によって断面線L及び優先方向が設定される(STEP1)。次に、第1データ選択部12は、設定された断面線L上の位置に略一致する二次元位置データを有する探査データを記憶部8から読込み第2データ選択部13に出力する(STEP2)。そして、第2データ選択部13は、第1データ選択部12から出力された各探査データの中から、優先方向と略平行する移動方向情報を有する探査データを選択し、その探査データを画像データ生成部9に出力する(STEP3)。そして、画像データ生成部9は、例えば、図10に示すように、第1データ選択部12によって二次元位置データ(X1,Y1)〜(X13,Y13)を有する探査データが選択されている場合に、優先方向として、ガス管11aの延伸方向と略直交する方向が設定されているときは、二次元位置データ(X1,Y1)〜(X5,Y5)を有する探査データを用いて、設定された断面線LについてのBスコープデータを生成する。また、画像データ生成部9は、優先方向として、水道管11bの延伸方向と略直交する方向を設定されているときは、二次元位置データ(X8,Y8)〜(X13,Y13)を有する探査データを用いて、Bスコープデータを生成し表示部10に出力する(STEP4)。最後に、表示部10は、例えば、二次元位置データ(X1,Y1)〜(X5,Y5)を有する探査データを用いて生成されたBスコープデータが出力された場合、設定された断面線Lに沿った探査エリアの断面において、図13に示すように、ガス管11aのみが強調された埋設状況を表す二次元の画像を表示する。また、表示部10は、二次元位置データ(X8,Y8)〜(X13,Y13)を有する探査データを用いて生成されたBスコープデータが出力された場合、図示省略するが、水道管11bのみが強調された埋設状況を表す二次元の画像を表示する(STEP5)。
【0036】
このような構成により、本実施形態における地中レーダ1によれば、探査エリア全体を網羅するようにレーダ本体2を移動操作して、複数の探査位置において探査データを得たあとに、探査エリアの所望の断面線Lに沿った断面における埋設状況を調査することができる。また、異なる方向に延伸して埋設された埋設物11が複数ある場合に、第2データ選択部13により移動方向の優先方向を設定することで、優先して表示部10に表示する埋設物11を設定することができるため、意図する方向の埋設物11の埋設状況のみを表示することができ、視認性のよい画像を得ることができる。
【0037】
なお、本実施形態において、画像データ生成部9は、第1データ選択部12によって設定された断面線Lに沿った探査エリアの断面における埋設物11の埋設状況を表示するBスコープデータを生成する構成で説明したが、これに限らず、第1実施形態と同様に、レーダ本体2を一方向に移動させたその走査軌跡に沿った探査エリアの断面における埋設物の埋設状況を表示するBスコープデータを生成することもできる。
【0038】
図14は、本発明による地中レーダの第3実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、方向通知部14を備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。また、地中レーダ1の動作については、以下に説明する方向通知部14の動作以外は同じであるため、説明を省略する。
【0039】
上記方向通知部14は、記憶部8に二次元位置データが略一致する探査データが複数ある場合は、その複数ある各探査データ内のAスコープデータに基づく受信波の強度が一番大きい探査データを選択し、選択した探査データの移動方向情報に基づき、埋設物11の延伸方向を通知するものである。
【0040】
一般的に、略一致する探査位置(X,Y)であっても、その探査位置で電磁波送信部5から送出される電磁波の電界の偏波方向が異なると、電磁波受信部6で受信される反射波の強度(受信波の強度)も異なるという特性がある。受信波の強度は、図2及び図3に示すように、延伸方向と偏波方向が平行なときが一番強く、この状態から、図4に示すように、延伸方向と偏波方向が交差しこの交差内角θが大きくなるに従って弱くなり、図示省略するが、延伸方向と偏波方向が直交したところで一番弱くなる。したがって、記憶部8に二次元位置データが略一致する探査データが複数ある場合は、受信波強度が一番強いAスコープデータが得られた時の偏波方向が求まれば、配管等の埋設物11の概略の延伸方向を求めることができる。
【0041】
ここで、送信アンテナ部53は、図3及び図4に示すように、送出する電磁波の電界の偏波方向がレーダ本体2の移動方向と直交するようにレーダ本体2に固定されているため、方向測定部4によりレーダ本体2の移動方向を測定することで、電磁波の電界の偏波方向を求めることができる。このように、移動方向を測定することにより、電界の偏波方向を求めて、配管等の埋設物11の概略の延伸方向を求めることができる。
【0042】
方向通知部14は、具体的には、選択した探査データの移動方向情報(レーダ本体2の移動方向の情報)に基づき、埋設物11の延伸方向の情報を生成し、表示部10に延伸方向の情報を出力し、オペレータ等に表示部10を介して延伸方向を通知する。これにより、配管等の埋設物11の概略の延伸方向を通知することができる。
【0043】
また、例えば、配管等の埋設物11の埋設状況を調査する際に、探査エリアのある探査位置の直下に埋設物11が埋設されていることについては分かっているが、その埋設物11の延伸方向については不明でありその延伸方向を正確に知りたい場合がある。このような場合、図3及び図4に示したように、その特定の探査位置(X,Y)又は近傍を複数の方向から通過するようにレーダ本体2を移動操作させて、記憶部8にその探査位置(X,Y)又はその近傍の位置を含む複数の探査データを記憶させる。方向通知部14は、例えば、上記のようにレーダ本体2を移動操作して、記憶部8に記憶された各探査データ内のAスコープデータに基づく受信波の強度をそれぞれ読取って、強度が一番大きい探査データを選択し、その探査データ内の移動方向情報に基づき、その探査位置における埋設物11の延伸方向を通知する。これにより、配管等の埋設物11の延伸方向を精度よく通知することができる。
【0044】
このような構成により、本実施形態における地中レーダ1によれば、配管等の埋設物11の延伸方向を通知することが可能な地中レーダ1を提供することができる。
【0045】
なお、本実施形態で説明した方向測定部4及び方向通知部14を設けて埋設物の延伸方向を通知する構成は、第1実施形態の地中レーダ1に限らず、図9に示した第2実施形態の地中レーダ1にも適用することができる。
【0046】
図15は、本発明による地中レーダの第4実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、データ不足通知部15を備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。また、地中レーダ1の動作については、以下に説明するデータ取得状況通知部15の動作以外は同じであるため、説明を省略する。
【0047】
上記データ取得状況通知部15は、探査エリアを、後述する図16に示すように、例えば、マトリックス状に設定された複数のセル16に区分し、各セル16内の探査データの取得状況を通知するものである。データ取得状況通知部15は、例えば、セル16内の探査データが2つ未満であるセル16と、セル16内の探査データが2つ以上あり各探査データの移動方向が略平行であるセル16とをデータ不足セル16a(例えば、図16に示すセル16a1〜16a5等)と判定し、このデータ不足セル16aの位置を通知するように構成されている。
【0048】
データ取得状況通知部15は、具体的には、例えば、表示部10にデータ不足セル16aの位置情報を出力し、探査データが不足しているセル16の位置を識別可能に表示させることで、探査データの取得状況をオペレータ等に通知する。図16は、オペレータが探査エリア全体を網羅するように意識して、ランダムにレーダ本体2を移動操作している最中に、表示部10が、データ不足セル16aをハイライト(図中ハッチングさせた部分)させて表示した表示例である。図16では、図の簡略化のため、図中二点鎖線から左側のエリアにのみ、データ不足セル16aの表示例を示したが、実際は、探査エリア全体で表示されている。図16において、セル16内に示した矢印は、そのセル16で区分されるエリア内の位置に対応する二次元位置データを有する探査データに基づくレーダ本体2の移動方向を示し、同じセル16内の矢印の本数は、そのセル16内の探査データの数を表している。
【0049】
データ不足セル16aとは、具体的には、例えば、図16に示すように、そのセル16内の探査データが、セル16a1のように全くないセルや、セル16a2のように1つしかないセルや、セル16a3やセル16a4のように探査データが2つ以上あるが、各移動方向が平行のセルや、セル16a5のように互いの移動方向が交差しているが、その交差内角θ’が予め設定する角度未満であり各移動方向が略平行とみなせるセルのことを示している。セル16a1をデータ不足セル16aとして通知するのは、オペレータが探査エリア全体を網羅するように意識してレーダ本体2を移動操作しても、そのセルを全く探査できていない場合があるためである。また、セル16a2〜16a5をデータ不足セル16aとして通知するのは、移動方向が一方向であったり、略平行であったりすると埋設物11の上をレーダ本体2が通過できず、埋設位置を正確に特定することができない場合があるためである。
【0050】
このような構成により、本実施形態における地中レーダ1によれば、レーダ本体2が移動操作されている際に探査データの取得状況を、例えば、探査データが不足しているデータ不足セルの位置を表示部10に表示等することにより、リアルタイムに通知することができるため、オペレータは、その通知に基づいて、探査データが不足している箇所を探査することができ、効率的に探査作業を行うことができる。このように、本実施形態における地中レーダ1は、探査データの不足が生じないように、オペレータに対してレーダ本体2の移動操作位置をナビゲーション可能な地中レーダ1を提供することができる。また、上記実施形態のように、移動方向をセル16内に矢印で示して探査データの取得状況を通知する構成にすることにより、オペレータは、データ不足セル16aにおいてどの方向にレーダ本体2を移動操作すればよいのかが分かる。このようにして、本実施形態における地中レーダ1は、オペレータに対してレーダ本体2の移動操作位置並びに方向をナビゲーション可能な地中レーダ1を提供することができる。
【0051】
なお、上記実施形態において、データ取得状況通知部15は、データ不足セル16aの位置を表示部に表示する構成で説明したが、これに限らず、データ不足セル16a以外のセル16、すなわち、データが充足しているデータ充足セル16b(例えば、図16に示すセル16b1〜16b3等)の位置を通知する構成としてもよく、また、データ不足セル16aとデータ充足セル16bを例えばセルの色等を変えてそれぞれ通知可能に構成してもよい。このように、データ充足セル16bの位置を通知することにより、探査エリアの偏った場所で、過多な探査が行われないようにすることができるため、無駄な移動操作作業を抑制することができる。また、データ取得状況通知部15は、上記のようにデータ不足セル16a及びデータ充足セル16bの少なくとも一方の位置を通知する構成において、データ充足セル16bにおいて、そのセル内の探査データが、さらに記憶部8に記憶された場合、このデータ充足セル16bをデータ過多セル16cと判定し、このデータ過多セル16cの位置も通知するように構成してもよい。例えば、図16に示すセル16b3がデータ過多セル16cである。
【0052】
また、上記実施形態においては、データ不足セル16a内に移動方向を矢印で表示して通知した例で説明したが、移動方向は通知しなくてもよい。この場合であっても、オペレータはデータ不足セル16aの位置を把握することができる。
【0053】
また、本実施形態で説明したデータ取得状況通知部15を設けて探査データの取得状況を通知する構成は、第1実施形態の地中レーダ1に限らず、第2及び第3実施形態の地中レーダ1にも適用することができる。
【0054】
図17は、本発明による地中レーダの第5実施形態を示す概略構成図である。本実施形態において、地中レーダ1は、図1に示した第1実施形態の構成に加えて、品質情報取得部17と品質通知部18とを備えて構成されている。尚、図1と同一の要素には同一の符号を示して説明を省略し、異なる部分についてのみ以下に説明する。また、地中レーダ1の動作については、以下に説明する品質情報取得部17及び品質通知部18の動作以外は同じであるため、説明を省略する。
【0055】
上記品質情報取得部17は、探査データの品質に関するデータ品質情報を、探査位置毎に取得するものである。このデータ品質情報は、記憶部8に探査データと関連付けて記憶される。品質情報取得部17は、具体的には、例えば、図示省略するが、レーダ本体2の周囲の雑音強度を測定する手段と、レーダ本体の移動速度を測定する手段と、レーダ本体2の振動を測定する手段と、レーダ本体2の傾きを測定する手段と、オペレータ等によってデータ品質情報を入力可能な手段とを備え、これらの測定手段及び入力手段により各種のデータ品質情報を取得するように構成されている。雑音強度を測定する手段は、例えば、電磁波送信部5から送出された電磁波を受信可能なものであり、受信した電磁波に基づく受信波形のS/Nを求めることが可能に構成されたものであり、電磁波受信部6を兼用し、信号処理部7でS/Nを求めるように構成してもよいし、電磁波受信部6及び信号処理部7とは別に設けたものであってもよい。また、移動速度を測定する手段は、例えば、レーダ本体2の車輪や車軸の回転を測定するエンコーダであり、振動を測定する手段は、例えば、振動計や加速度計やジャイロである。そして、傾きを測定する手段は、例えば、ジャイロである。振動及び傾きをジャイロで構成する場合は、方向測定部4のジャイロと兼用してもよい。データ品質情報を入力可能な手段は、オペレータ等によって認識された探査データの品質の良し悪しの程度を、データ品質情報として入力可能に構成されたものであり、例えば、入力ボタン等を備えて構成したものである。この探査データの品質の良し悪しの程度は、品質が悪い場合を1、良い場合を0とした2値化された情報であってもよいし、オペレータ等のアナログ的な感覚を連続的な数値若しくはそれに類する形式により表した情報であってもよい。例えば、入力するデータ品質情報をアナログ的な感覚とする場合、データ品質情報を入力可能な手段は、レバー等を備えて構成するとよい。
【0056】
上記品質通知部18は、品質情報取得部17によって取得されたデータ品質情報に基づき、探査データの品質をランク付けし、このランクが予め設定した許容ランク未満で有る場合は、許容ランク未満で有る探査データの探査位置を通知するように構成されている。品質通知部18は、具体的には、例えば、記憶部8に探査データ毎に関連付けて記憶された各種のデータ品質情報を読み込み、読込んだデータ品質情報の種類毎に予め定めた評価方法に基づき点数を付けし、探査データの総合的な品質をデータ品質情報の種類毎に付けられた点数を加算した値でランク付けする。例えば、雑音強度については、S/Nが大きい程品質がよいので点数を高く付け、移動速度については、速度が過度に速いと精度よく位置を特定できないため品質が悪いので点数を低く付け、レーダ本体の振動及び傾きについては、受信アンテナ部61が動くと地表面までの距離が変動してしまうため品質が悪いので点数を低く付け、品質の良し悪しの程度については、悪い場合の点数を低く付け、これらの点数によってランク付けする。このランクが許容ランク未満で有る場合は、その探査データは信頼性に劣るデータであると判定し、その探査データの探査位置の情報を表示部10に出力し、表示部10を介して品質不良の探査データの箇所をオペレータに通知する。なお、探査位置が略一致し、かつ、移動方向情報も略一致する探査データが複数ある場合は、これらのAスコープデータを加算することによりS/Nが向上し、その探査位置における探査データの品質が良く、探査の重複回数が多いほど品質がよくなるため、探査の重複回数に応じた所定の点数を雑音強度に基づく点数に加算して、ランク付けを行ってもよい。また、ランク付けは、上記のように、データ品質情報の種類毎に付けられた点数を加算した値で総合的に行う場合に限らず、データ品質情報の種類毎に個別に行ってもよい、この場合、品質不良の種類を通知するようにしてもよい。
【0057】
このような構成により、本実施形態における地中レーダ1によれば、品質情報取得部17によって取得されたデータ品質情報を探査データと関連付けて記憶することができるため、地中レーダのオペレータは、データ品質情報により、探査データの信頼性を把握することができる。これにより、記憶部8に記憶されている探査データの中に信頼性に劣る探査データがある場合は、その探査データを取得した位置での再度の探査をオペレータに促すことができるため、全体的な探査データの品質を向上することができる。また、本実施形態は、データ品質情報に基づき、探査データの品質をランク付けし、このランクが予め設定した許容ランク未満で有る場合は、許容ランク未満で有る探査データの探査位置をオペレータに通知することができるため、オペレータはその通知に基づき容易に再探査することができる。
【0058】
なお、本実施形態において、品質情報取得部17は、レーダ本体2の周囲の雑音強度を測定する手段、レーダ本体2の移動速度を測定する手段、振動を測定する手段及び傾きを測定する手段、オペレータ等によってデータ品質情報を入力可能な手段をそれぞれ備えたものとして説明したが、これに限らず、例えば、雑音強度を測定する手段だけ備えて構成されていてもよい。品質情報取得部17は、雑音強度、移動速度、振動、傾きを測定する手段、データ品質情報を入力可能な手段のうち少なくとも一つを備えていればよい。
【0059】
また、本実施形態においては、品質通知部18を備えた場合で説明したが、品質通知部18は設けなくてもよい。この場合であっても、例えば、前述したようにデータ品質情報に基づき探査データの信頼性をオペレータに把握させることで、信頼性に劣る探査データの探査位置での再度の探査をオペレータに促して、全体として品質のよい探査データとすることができる。
【0060】
また、本実施形態で説明した品質情報取得部を設けて探査データの品質を向上させる構成は、第1実施形態の地中レーダ1に限らず、前述した第2〜第4実施形態の地中レーダ1にも適用することができる。第2実施形態に適用する場合、例えば、品質のランクが予め設定した許容ランク未満で有る探査データの情報を品質通知部18から第1データ選択部12又は第2データ選択部13に出力し、第1データ選択部12又は第2データ選択部13は、Bスコープデータを生成するための探査データとして許容ランク未満で有る探査データを排除するように構成したり、第2データ選択部13によって選択された探査データの中に品質のランクが悪い探査データがあった場合に、その品質ランクが悪い探査データと探査位置が略一致する探査データがある場合には、優先方向と略一致しないが品質ランクの良い探査データを優先して選択するように第2データ選択部13を構成したりするとよい。これらにより、品質のよいBスコープデータを生成することができるため、精度のよい解析を行うことができる。また、本実施形態において、地中レーダ1は、方向測定部4を備える場合で説明したが、方向測定部4は備えなくてもよい。この場合であっても、探査データの品質を向上することができる。
【0061】
また、上記全ての説明において、Aスコープデータは、移動方向情報やデータ品質情報と紐つけされた場合で説明したが、これらに限らず、さらに、例えば、カメラによってレーダ本体2の周辺や地表面の画像や映像を撮像し、それらの撮像データとも関連付けて記憶させるようにしてもよい。これにより、オペレータが探査データを解析する際に実地状況も加味して解析することができる。
【符号の説明】
【0062】
1 地中レーダ
2 レーダ本体
3 位置測定部
4 方向測定部
5 電磁波送信部
6 電磁波受信部
8 記憶部
9 画像データ生成部
11 埋設物
12 第1データ選択部
13 第2データ選択部
14 方向通知部
15 データ取得状況通知部
16 セル
17 品質情報取得部
18 品質通知部
【特許請求の範囲】
【請求項1】
地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、
前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、
前記レーダ本体の移動方向の情報を取得する方向測定部と、
前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データと、前記方向測定部によって取得された前記移動方向情報とを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、
を備えたことを特徴とする地中レーダ。
【請求項2】
前記探査エリア内で一本の断面線を設定し、前記記憶部に記憶された前記各探査データの中から、前記断面線上の位置に略一致する二次元位置データを有する探査データを選択する第1データ選択部と、
前記移動方向の優先方向を設定し、前記第1データ選択部によって選択された各探査データの中から、前記設定した優先方向と略平行する移動方向情報を有する探査データを選択する第2データ選択部と、
前記第2データ選択部によって選択された探査データに基づき、前記断面線に沿った前記探査エリアの断面における埋設物の埋設状況を表示する画像データを生成する画像データ生成部と、
を備えたことを特徴とする請求項1に記載の地中レーダ。
【請求項3】
前記記憶部に前記二次元位置データが略一致する前記探査データが複数記憶されている場合は、その複数ある各探査データ内の受信波データに基づく受信波強度が一番大きい探査データの前記移動方向情報に基づき、前記埋設物の延伸方向を通知する方向通知部を備えたことを特徴とする請求項1又は2に記載の地中レーダ。
【請求項4】
前記探査エリアを複数のセルに区分し、各セル内の前記探査データの取得状況を通知するデータ取得状況通知部を備えたことを特徴とする請求項1〜3のいずれか一つに記載の地中レーダ。
【請求項5】
前記探査データの品質に関するデータ品質情報を、前記探査位置毎に取得する品質情報取得部を備え、前記記憶部は、前記探査データと関連つけて前記データ品質情報を記憶することを特徴とする請求項1〜4のいずれか一つに記載の地中レーダ。
【請求項6】
地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、
前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、
前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データとを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、
を備えると共に、
前記探査データの品質に関するデータ品質情報を、前記探査位置毎に取得する品質情報取得部を備え、前記記憶部は、前記探査データと関連つけて前記データ品質情報を記憶することを特徴とする地中レーダ。
【請求項7】
前記品質情報取得部は、前記レーダ本体の周囲の雑音強度を測定する手段、前記レーダ本体の移動速度を測定する手段、前記レーダ本体の振動を測定する手段、前記レーダ本体の傾きを測定する手段、前記データ品質情報を入力可能な手段のうち少なくとも一つを備えることを特徴とする請求項5又は6に記載の地中レーダ。
【請求項8】
前記品質情報取得部によって取得されたデータ品質情報に基づき、前記探査データの品質をランク付けし、該ランクが予め設定した許容ランク未満で有る場合は、該許容ランク未満で有る前記探査データの探査位置を通知する品質通知部を備えることを特徴とする請求項5〜7のいずれか一つに記載の地中レーダ。
【請求項1】
地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、
前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、
前記レーダ本体の移動方向の情報を取得する方向測定部と、
前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データと、前記方向測定部によって取得された前記移動方向情報とを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、
を備えたことを特徴とする地中レーダ。
【請求項2】
前記探査エリア内で一本の断面線を設定し、前記記憶部に記憶された前記各探査データの中から、前記断面線上の位置に略一致する二次元位置データを有する探査データを選択する第1データ選択部と、
前記移動方向の優先方向を設定し、前記第1データ選択部によって選択された各探査データの中から、前記設定した優先方向と略平行する移動方向情報を有する探査データを選択する第2データ選択部と、
前記第2データ選択部によって選択された探査データに基づき、前記断面線に沿った前記探査エリアの断面における埋設物の埋設状況を表示する画像データを生成する画像データ生成部と、
を備えたことを特徴とする請求項1に記載の地中レーダ。
【請求項3】
前記記憶部に前記二次元位置データが略一致する前記探査データが複数記憶されている場合は、その複数ある各探査データ内の受信波データに基づく受信波強度が一番大きい探査データの前記移動方向情報に基づき、前記埋設物の延伸方向を通知する方向通知部を備えたことを特徴とする請求項1又は2に記載の地中レーダ。
【請求項4】
前記探査エリアを複数のセルに区分し、各セル内の前記探査データの取得状況を通知するデータ取得状況通知部を備えたことを特徴とする請求項1〜3のいずれか一つに記載の地中レーダ。
【請求項5】
前記探査データの品質に関するデータ品質情報を、前記探査位置毎に取得する品質情報取得部を備え、前記記憶部は、前記探査データと関連つけて前記データ品質情報を記憶することを特徴とする請求項1〜4のいずれか一つに記載の地中レーダ。
【請求項6】
地中に向けて電磁波を送出する電磁波送信部と、送出された該電磁波の反射波を受信する電磁波受信部とを備えたレーダ本体を有し、該電磁波受信部によって受信された電磁波に基づく受信波データから地中に埋設された埋設物を探査する地中レーダにおいて、
前記埋設物の探査エリアでの前記レーダ本体の二次元的な位置を測定する位置測定部と、
前記探査エリアの探査時に、前記電磁波受信部によって受信した電磁波に基づく前記受信波データと、前記位置測定部によって取得された二次元位置データとを一単位の探査データとし、該探査データを前記探査位置毎にそれぞれ記憶する記憶部と、
を備えると共に、
前記探査データの品質に関するデータ品質情報を、前記探査位置毎に取得する品質情報取得部を備え、前記記憶部は、前記探査データと関連つけて前記データ品質情報を記憶することを特徴とする地中レーダ。
【請求項7】
前記品質情報取得部は、前記レーダ本体の周囲の雑音強度を測定する手段、前記レーダ本体の移動速度を測定する手段、前記レーダ本体の振動を測定する手段、前記レーダ本体の傾きを測定する手段、前記データ品質情報を入力可能な手段のうち少なくとも一つを備えることを特徴とする請求項5又は6に記載の地中レーダ。
【請求項8】
前記品質情報取得部によって取得されたデータ品質情報に基づき、前記探査データの品質をランク付けし、該ランクが予め設定した許容ランク未満で有る場合は、該許容ランク未満で有る前記探査データの探査位置を通知する品質通知部を備えることを特徴とする請求項5〜7のいずれか一つに記載の地中レーダ。
【図3】


【図4】

【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図1】

【図2】
【図9】
【図14】

【図15】
【図16】
【図17】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図1】
【図2】
【図9】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−229931(P2012−229931A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−96896(P2011−96896)
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]