
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
201 - 220 / 636
車両の周囲状況を表す方法
本発明は、車両(5)の周囲状況を表す方法に関しており、ここでは、車両(5)の周囲にある対象体をセンサによって検出し、それぞれ検出した対象体を2つの座標点(11,13)と、各座標点(11,13)に割り当てられた位置曖昧さ(15)とによって表し、これらの座標点(11,13)および位置曖昧さ(15)をインタフェースにデータとして記憶し、このインタフェースには車両(5)の走行アシストシステムがアクセス可能である。本発明はさらに車両(5)と対象体との衝突確率を求める方法に関しており、ここではまず上記の車両(5)の周囲を表す方法を使用して車両(5)の周囲を表し、つぎのステップでは上記の位置曖昧さ(15)を考慮して、この車両(5)が走行するチューブ状走行パス(23)を求め、続いて対象体とチューブ状走行パス(23)との重なり度を求め、ひいては衝突確率を求める。 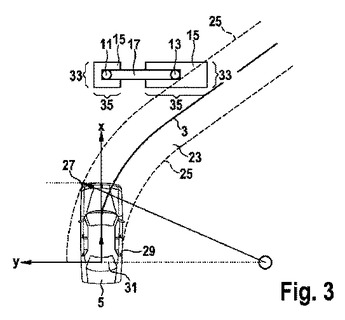 (もっと読む)
(もっと読む)
物体認識装置
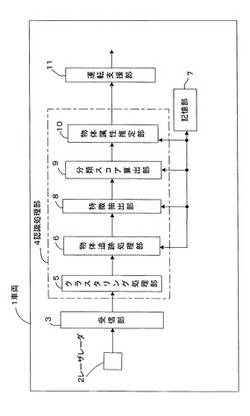
【課題】車載レーダの反射の検出パターンから車両、自転車、人(歩行者)等を区別して精度よく認識する新規な物体認識装置を提供する。
【解決手段】特徴抽出部8、分類スコア算出部9により、フレーム毎のレーザレーダ2の反射の検出パターンを、物体毎に用意した複数の特徴パターンのいずれかに分類し、さらに、物体属性推定部10により、段の時系列の複数フレームのパターン認識の分類結果を累積することで、物体の移動の方向や姿勢等の時間変化を吸収し、それらの影響を排除して物体を正確に認識する。
(もっと読む)
車載用レーダ装置

【課題】レーダ測定座標系の軸ずれ角度の推定処理に必要な演算資源量を減らし、装置サイズを小さくすることができる車載用レーダ装置を得る。
【解決手段】ターゲット情報として方位角度と相対ドップラー速度を測定する測定部14と、ターゲットの相対ドップラー速度と自車の走行速度及び自車の旋回速度に関する条件を満足するターゲット情報を抽出し、新たなターゲット情報として、抽出されたターゲット情報のうち、方位角度と、相対ドップラー速度を自車の走行速度で除算した速度比とを蓄積する抽出蓄積部15と、抽出蓄積部に蓄積されたターゲット情報を読み出して、レーダによる測定座標系の軸ずれ角度をターゲットの方位角度の2次多項式に基づいて推定する軸ずれ角度推定部16とを備える。
(もっと読む)
任意信号発生装置
【課題】比較的低い周波数のサンプリング周波数を用いつつ、生成する信号の周波数帯域を拡張し、より高周波域までの任意波形の信号を生成可能とする。
【解決手段】目的信号を複数の周波数領域で分割し、コントローラ2から各信号処理モジュールM1〜M4に各周波数領域のスペクトル情報を与え、各モジュールで各周波数領域の信号を生成して混合器3で合成することにより、必要なサンプリング周波数を低減しつつ目的信号を得る。このとき、コントローラ2は、信号処理モジュール毎の遅延時間差に相当する初期位相分で各信号処理モジュールへ入力するスペクトル情報(位相)を補正し、更に、信号処理モジュール毎の遅延時間差に起因した出力データの立ち上がり部分,立下り部分の少なくとも一方の不連続点を、混合器3の出力段に設けたスイッチ部4を介して除去する。
(もっと読む)
水面形状計測装置、及び水面形状計測方法
【課題】設置や運用が比較的容易な観測機器を用いて、海洋等の水面形状を測定できる水面形状計測装置、及び水面形状計測方法を提供する。
【解決手段】水面に対してパルス状マイクロ波を放射し、その後方散乱波を予め定めたタイミングごとに複数回受信し、複数の計測点ごとの後方散乱波を検出して、各後方散乱波に対応する複数のドップラー信号を出力するレーダー部10を複数備える。レーダー部10の各々が出力する複数のドップラー信号により、各レーダーのパルス状マイクロ波放射方向に沿って配される、複数の計測点での水面での水粒子の運動の情報を生成し、また各レーダー部10のパルス状マイクロ波放射方向と波浪の進行方向とのなす角を表す情報に基づいて、波浪の進行方向を決定する。
(もっと読む)
アレーアンテナ装置及びレーダ装置
【課題】可視領域の広域化を図りつつ、アンテナ素子の素子間隔を広くすることのできるアレーアンテナ装置及びこのアレーアンテナ装置を用いてターゲットを検知するレーダ装置を提供する。
【解決手段】当該レーダ装置1にて使用される電波の波長をλとした場合に、送信アンテナ素子14a〜14eの素子間隔Dtを波長λの「0.9倍」に設定し、受信アンテナ素子15a〜15cの素子間隔Drを波長λの「1.5倍」に設定することで、送信アンテナ素子14a〜14eの素子間隔Dt及び受信アンテナ素子15a〜15cの素子間隔Drには「素子間隔Dr=素子間隔Dt×1.5」との関係を設定した。
(もっと読む)
レーダ装置
【課題】検知範囲内に位置するターゲットの検知精度を向上することのできるレーダ装置を提供する。
【解決手段】レーダ装置1を構成するマイコン10は、まず、ステップS10の処理として、受信アレーアンテナ15のヌル点をヌル点NL1〜NL11のうちの1つに設定し、受信アレーアンテナ15のヌル点が設定された状態で受信された受信信号RをRAM等に記憶する。次に、マイコン10は、上記ヌル点NL1〜NL11すべてに対してこうした一連の処理を順次実行する。そして、マイコン10は、上記ヌル点NL1〜NL11に対する受信信号Rを順次記憶すると、これら記憶した受信信号Rの加算平均を算出する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
(もっと読む)
干渉波検出装置及び干渉波検出方法
【課題】信号処理されたレーダ受信信号から干渉波を検出する。
【解決手段】 PPIデータ生成部141は、信号処理されたレーダ受信信号から、観測対象の位置を示す2次元のPPIデータを生成する。参照波メモリ142は、干渉波の原因となる与干渉局の電波情報を保持する。参照波データ生成部142は、参照波メモリが保持する電波情報に基づいて、干渉波を再現した2次元参照波パターンを生成する。パターンマッチング部144は、2次元参照波パターンと相関の高い領域を、干渉領域として2次元のPPIデータから検出する。
(もっと読む)
干渉波検出装置、レーダ装置及び干渉波検出方法
【課題】レーダ受信信号から干渉波による影響を高精度に検出する。
【解決手段】対象点選択部173は、観測対象から反射された所定ヒット数のレーダ受信信号から、少なくとも1つの受信信号を選択する。平均電力算出部174は、当該所定ヒット数のレーダ受信信号から、当該レーダ受信信号の受信電力の平均値を算出する。選択された受信信号の電力値と、当該平均値との差分が算出され、当該差分が所定の閾値以上である場合に、干渉判定部175が、選択された受信信号に干渉波が混入していると判定する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
レーダ装置及び干渉波除去方法
【課題】干渉波による影響を正確に除去できるレーダ装置を提供する。
【解決手段】 観測対象から反射された受信信号は、相関算出部173に入力する。参照波メモリ171は、干渉波の原因となる他局の電波情報を予め保持している。シフト部172は、参照波メモリ171が保持する情報に基づいて、干渉波を再現した参照波を生成する。シフト部172は、参照波のパルス立ち上がり点を順次ずらし、相関算出部173が算出する参照波と受信信号との相関が最も高くなるような参照波パルスの立ち上がり点が、最大値検出部174によって検出される。ホールド部175は、参照波パルスの立ち上がり点を移動させ、除去処理部176は、受信信号から、立ち上がり点が移動した参照波パルスを除去する。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
実ビームのレーダ画像のクロスレンジ向上のための方法
【課題】クロスレンジ方向でレーダ画像の分解能を向上させるための方法および装置を提供する。
【解決手段】レーダ画像を取得し、表示するための装置10は、反射されたレーダ信号を受信するように構成されたアンテナ11と、受信されたレーダ信号を方位角に対する受信されたパワーの関数に変換するように構成され、その変換には、方位角に対する前記受信されたパワーの関数にウィンドウ関数を乗算することによって、方位角に対する前記受信されたパワーの関数からマップ画像を生成することを含む、プロセッサ14と、受信されたレーダ信号に基づいて分解能を向上させたマップ画像を表示するように構成された地図表示器16とを備える。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】過去の物体検出処理において検出された物体情報の周波数を整数倍した周波数に基づいて、所定周波数範囲を設定して、アップ区間とダウン区間のそれぞれでピーク信号が所定周波数範囲内にある場合に、ピーク信号を特定ピーク信号として設定する。そして、アップ区間とダウン区間との特定ピーク信号同士をペアリングする。これにより、物体情報を正確に検出できる。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとに高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(Z)と降水強度(R)との関係式(Z=B×Rβ:B,βは定数)における第1定数(B)を、レーダ反射因子(Z)をもとに算出し、第1定数(B)、平均降水強度(Rave)及びレーダ反射因子(Z)をもとに第2定数(β)を推定し、上記関係式に基づいて、第1空間分解能の降水強度(R)を算出する。
(もっと読む)
新規なセンサフュージョン手法を用いた、移動体の状態推定のための装置、方法、およびプログラム
【課題】さまざまな異なる環境に適用できる状態推定系を実現する。
【解決手段】系の状態を推定するための装置であって、(a) ひとつ以上の第一のセンサと、(b) ひとつ以上の第二のセンサと、(c) ひとつ以上の第一のセンサのいずれかから各々が出力を受けて記憶手段に格納する複数の下位モジュールとを含み、下位モジュールが有する記憶手段は下位モジュールの各々に対応する地図と、系の状態を推定するための情報でありひとつ以上の第二のセンサのいずれかの出力から生成され第一のセンサのいずれかの出力と地図とに基づいて更新をされる第一のデータセットとを有し、さらに(d) 複数の下位モジュールの各々から出力された第一のデータセットを受けとり下位モジュールの各々に第一のデータセットの改善を行わせ第一のデータセットを統合し系の状態を推定して下位モジュールの各々へフィードバックする上位モジュールを含む。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、偏波毎の受信電力をもとにレーダ反射因子(ZH,ZV)及び差分レーダ装置反射因子(ZDR)を算出し、受信電力の偏波間位相差(φDP)をもとに算出された比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(ZH)と降水強度(R)との関係式(ZH=B×Rβ:B,βは定数)における第1定数(B)を差分レーダ装置反射因子(ZDR)から算出し、さらに平均降水強度(Rave)及びレーダ反射因子(ZH)をもとに第2定数(β)を推定し、上記関係式に基づいて第1空間分解能の降水強度(R)を算出する。
(もっと読む)
パルスレーダ装置
【課題】クラッタ、多次エコーの抑圧が可能で、合成帯域処理により相対速度を高精度・高速度分解能で計測し、高距離分解能の測距を行うパルスレーダ装置を得る。
【解決手段】周波数重複がなく周波数順に並べると隣接周波数差が所定周波数の整数倍になる任意のパターンの信号列を所定周期で出力する可変周波数発振器1、信号列と基準中間周波数信号から送信キャリア信号を生成、パルス化し送信信号を送信する送信手段2,3a,4、送信信号による目標等からの反射信号や前記信号列から受信ビデオ信号を生成かつ反射信号以外の周波数成分を遮断する機能含む受信手段3b,7〜13、受信ビデオ信号から目標の相対速度を得る相対速度計測器14、相対速度により受信ビデオ信号に相対速度補正し合成帯域処理を行う相対速度補正合成帯域処理器15、及びその出力の振幅値から合成帯域処理による目標の高分解能の測距結果を得る包絡線検波器16を含む。
(もっと読む)
車載レーダシステム
【課題】複数のレーダ装置の各物標検知軸を軸調整する際、各レーダ装置の軸調整を容易かつ速やかに行うことができ、各軸調整によって物標の検知精度を高めることができる車載レーダシステムの提供。
【解決手段】第1および第2レーダ装置と、路側物の捕捉点の軌跡ベクトルを算出する軌跡ベクトル算出手段と、自車が直進中であることを検知する走行状態検知手段と、自車が直進中であることが検知された場合、第1レーダ装置における所定の検知方向と路側物の捕捉点の軌跡ベクトルとがなす対路側角度を検知する第1の角度検知手段と、自車が直進中であることが検知された場合、第2レーダ装置における所定の検知方向と路側物の捕捉点の軌跡ベクトルとがなす対路側角度を検知する第2の角度検知手段と、第1の角度検知手段で検知された対路側角度と第2の角度検知手段で検知された対路側角度の差分値を算出する差分角度算出手段とを備える。
(もっと読む)
201 - 220 / 636
[ Back to top ]