
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
261 - 280 / 636
信号を決定する装置および手法
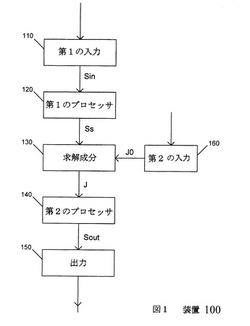
【課題】テプリッツ行列、またはブロックテプリッツ行列を係数行列とする連立方程式の求解効率を大幅に上げる。
【解決手段】初期連立方程式を、巡回または近似的に巡回である行列の積に分離し、次数を縮小した多数の連立方程式に分離した後で、次数が少なくなった連立方程式の解をもとに初期連立方程式の解を計算する。
(もっと読む)
レーダ装置

【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
車載レーダ装置
【課題】自車が停車もしくは所定の速度以下の際に、放射するパルスの送信波の電力を下げるように制御すると、受信信号の受信レベルが小さくなるためS/Nが小さくなり、目標物体が検知しにくくなる。
【解決手段】目標物体30に向けて送信部11からパルスの電波を送信し、受信部12により目標物体で反射した電波を受信して、目標物体までの距離等を算出する信号処理手段13を備えた車載レーダ装置において、受信部で受信した信号から1/f雑音を抑えるノイズ除去手段123を設けると共に、自車が停車もしくは所定の速度以下の際に送信部から送信するパルスの電波の平均電力を低下させる電力制御手段112、115を設け、自車が停車もしくは所定速度以下の際に送信電力を低下させることに伴い受信信号のS/Nが低下するのを防ぎ、かつ電力消費を必要最小限に抑える。
(もっと読む)
レーダー装置
【課題】より正確に障害物を検出可能とするレーダー装置を提供する。
【解決手段】電磁波を照射し、物体により反射された当該電磁波の反射波を受信して当該物体を検出するレーダー装置であって、電磁波を照射する照射手段と、電磁波の照射方向を示す照射軸線を上下方向へ揺動する照射方向揺動手段と、所定のタイミングにおいて、揺動手段を動作させて照射軸線の向きを水平方向以外の方向へ向ける照射方向制御手段とを備える、レーダー装置である。
(もっと読む)
偏波レーダ装置
【課題】 従来の偏波のレーダは偏波を時分割で切替えて送受信するため、偏波信号処理に必要な偏波データが揃うのに時間を要し、数フレームに一回しか処理結果が得られなかった。このため終末誘導時の誘導信号の出力レートが低く、機体の誘導精度が低下するという課題があった。
【解決手段】 終末誘導時には送信偏波(V送信)を固定し、受信した片偏波(例えばVV、HV)のビデオ信号から特徴量を抽出する。抽出した特徴量と、初中期誘導時にメモリしたビデオデータベースから偏波信号処理に必要な他の片偏波(HH、VH)のビデオ信号を推定し、受信したビデオ信号(VV、HV)と推定したビデオ信号(HH、VH)で偏波信号処理を実施する。これにより1フレームのビデオ信号から偏波信号処理が実施可能になるため、従来と比べて2倍の更新レートが得られ機体の誘導精度が向上する。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
レーダシステム
複数のサブアレイ(6)を有するフェーズドアレイ(4)によって受信された信号から走査受信ビームを形成するためのレーダシステムは、1つまたは複数のサブアレイから前記信号を受け取るようにそれぞれが構成された複数の位相ユニット(8)を備える。各位相ユニット(8)は、時間的に変化する位相シフトに対応する周波数を有するアナログ波形を発生するように構成された波形発生器(18)を備える。各波形発生器(18)は、アナログ波形をデジタル的に発生しかつ受け取った信号と波形の比較を出力するように構成され、この出力は時間的に変化する位相シフトを含んでいる。システムはさらに、複数の位相ユニット(8)からの出力を組み合わせて走査受信ビームを形成するように構成された組み合わせユニット(10)を備える。  (もっと読む)
(もっと読む)
信号処理装置
【課題】 従来のCFAR(Constant False Alarm Rate)回路では、入力信号特性とCFAR回路特性が合わないため、近接する複数目標を検出できない場合や、クラッタを抑圧できず誤検出する場合があった。
【解決手段】 CFAR回路内の各参照セル内の最大値を除いて平均することにより、特定振幅によるノイズレベル上昇を抑圧することができる。また、クラッタのような広がりのある信号存在時には、GO−CFARを用いることにより、ノイズレベルが上昇し誤警報を抑圧することができる。
(もっと読む)
飛行中の航空機に使用する気象情報を補正するためのシステムおよび方法
【課題】気象を検出しそして飛行中の航空機に使用する検出された気象情報を記憶するシステムおよび方法を提供する。
【解決手段】気象情報記録システムおよび方法は、飛行中の航空機104によって検出された情報を記録するために動作可能である。関心の気象108、110の存在に対応するトリガイベントを発生し、トリガイベントの発生に応答して航空電子システム302により収集された気象情報をメモリに記憶し、記憶された気象情報を遠隔メモリにダウンロードする。トリガイベントを発生は、気象の少なくともひとつの次元を決定し、気象の少なくともひとつの次元を対応する次元の閾値と比較して、気象次元閾値を超える気象の少なくともひとつの次元に応答して気象情報を記憶しても良い。気象情報は乱気流閾値を超える検知された乱気流に次元に応答して記憶されても良い。
(もっと読む)
レーダ装置およびレーダ調整方法
【課題】 車両に搭載された状態でコーナリフレクタなどの物標を用いることなくレーダのビームの出射方向を調整することができるレーダ装置およびレーダ調整方法を提供する。
【解決手段】 マイコン16は、レーダ装置1単体で、Gセンサ11によって4つの姿勢で検出した加速度を表すベクトルGp1〜Gp4に基づいて、回転軸ベクトルaおよび第1のビーム軸ベクトルB1を算出し、メモリ17に記憶する。次に、レーダ装置1を車両2に搭載した状態で、Gセンサ11によって2つの車両姿勢で検出した加速度を表すベクトルGp5,Gp6に基づいて、第2のビーム軸ベクトルB2を算出し、メモリ17に記憶する。そして、メモリ17に記憶される回転軸ベクトルa、第1のビーム軸ベクトルB1、および第2のビーム軸ベクトルB2に基づいて、垂直方向でのずれ角度θdを算出し、ずれ角度θdだけアンテナ回転軸12を中心にアンテナ10を回転して調整する。
(もっと読む)
RFIDシステムおよび無線装置
【課題】干渉なしでキャリア波を無線装置に送信させる。
【解決手段】測位システムにおいて、基準無線装置(302)は、第1の期間(40)に情報要求信号(42)を送信し、第2の期間(41)に無変調キャリア波要求信号(42)を送信する送信部(330)と、応答信号(56)を受信し、第3の期間(49)に無変調キャリア波を受信して無変調キャリア波の位相差(PD)を検出する受信部(350)と、受信識別情報を出力し、位相差(PD)を出力する制御部と、を具えている。
(もっと読む)
レーダ装置
【課題】対象の速度を正確に計測するレーダ装置を提供する。
【解決手段】電波を送信して、対象の距離、角度と相対速度を計測するレーダ装置において、レーダの正対方向の法線方向をXとするとき、対象の移動方向を判定する対象移動方向判定手段と、前記対象移動方向判定手段の判定結果に基づき、対象の速度を算出する対象速度算出手段を有し、前記対象速度算出手段は、前記対象移動方向判定手段により、対象がX方向に移動していると判定された場合には、対象のX方向速度を、
(V - Vs*cosθ)/sinθ(ただし、θはレーダ装置の正対方向に対する対象の角度、Vはレ
ーダで計測された相対速度、Vsは自車の速度)
で算出する。
(もっと読む)
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ率kでチャープ変調した送信パルスを送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300は送信パルスを受信すると、別のチャープ率k’でチャープ変調した放射パルスを送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をチャープ率kでレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をチャープ率k’でレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
SAR(SyntheticApertureRadar)重畳データ生成装置、SAR重畳データ再生装置、SAR重畳データ生成プログラム、SAR重畳データ再生プログラム、SAR重畳データ生成方法およびSAR重畳データ再生方法
【課題】SAR(合成開口レーダー)と光学センサとによる同時観測においてSAR画像と同じデータ量でSAR画像と光学画像とを伝送し、地上での画像再生処理においてSAR画像と光学画像とを別々に画像化できるようにすることを目的とする。
【解決手段】SAR/光学観測衛星110では、(1)SAR111と光学センサ112とにより地上の同じ地域を観測し、(2)SAR/光学伝送装置200によりSAR111の観測データと光学センサ112の観測データとを重畳させた重畳データを生成し、(3)重畳データをダウンリンクする。地上センタ120では、(4)SAR/光学再生装置300により重畳データからSAR画像と光学画像とを再生する。(2)においてSAR/光学伝送装置200は、光学センサ112で撮像した光学画像に対してSAR再生処理の逆処理をし、逆処理した光学画像を符号化して光学センサ112の観測データを生成する。
(もっと読む)
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ変調した送信パルスをパルス繰り返し間隔PRIごとに送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300はチャープ変調した放射パルスを別のパルス繰り返し間隔PRI’ごとに送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をパルス繰り返し間隔PRIごとにレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をパルス繰り返し間隔PRI’ごとにレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
レーダ受信機
【課題】移動しながら広範囲の信号を送受信するレーダ装置の場合に、受信機における受信信号の飽和を防止するようにAGCを制御することによって、受信系のダイナミックレンジを有効に利用可能にする。
【解決手段】開示されるレーダ受信機は、合成開口レーダのレーダ受信機であって、高周波パルスを目標に対して送信し、目標からの反射パルスを受信するレーダアンテナ1と、前記受信波を増幅する入力増幅器2と、入力増幅器の出力を周波数変換して出力するミキサ回路3と、ミキサ回路の出力信号を分岐する分岐器4と、分岐器で分岐された一方の出力信号を整流する整流器5と、整流器の整流信号によってSTCパターンを生成するSTC回路6と、前記分岐器の他方の出力信号をSTC回路で生成されたSTCパターンに対応する減衰制御信号に応じて可変減衰させる可変減衰器7と、可変減衰器の出力信号を増幅して出力する出力増幅器8とを備えている。
(もっと読む)
FMCWレーダセンサ、及び、周波数マッチングのための方法
本発明は、FMCWレーダセンサにおける周波数マッチングのための方法であって、レーダセンサにより測定された物体をそれぞれに表し、様々な変調ランプ上で獲得される複数の周波数が、物体の間隔dと速度vとの可能な組み合わせを表す軌跡(g1〜g4)としてd−v空間(26)内に示され、様々な変調ランプ上で測定される物体を識別するために、様々な変調ランプ上で獲得される周波数に対応する軌跡間の一致(T、S)が探索される、上記方法において、最初のステップでは、一致(T)の探索がd−v空間(26)の部分空間(40)に限定され、後続のステップでは、探索がd−v空間の他の範囲へ拡大されるとともに、最初のステップで見出された物体に対応する周波数が隠されることを特徴とする方法に関する。 (もっと読む)
目標追尾装置
【課題】航跡候補の増大や誤相関を抑制し、正解航跡の選択を可能とする目標追尾装置を得る。
【解決手段】観測値管理手段110、航跡候補(選択モデル)コスト行列算出手段120、多重モデル対応多次元相関決定手段130、航跡管理手段140、航跡選択モデル参照部151、および航跡候補(非選択モデル)コスト行列算出手段160を備えて構成され、各航跡でNフレーム前の平滑値を元に、最新Nフレームでは運動モデル間の遷移はないとして、複数の運動モデルで航跡と観測値の割当を実施する。
(もっと読む)
画像レーダ装置及び信号処理装置
【課題】レーダの移動に伴いレーダビームの照射方向を変化させる複数ビーム観測方式を実現する画像レーダ装置及び信号処理装置を得る。
【解決手段】同一または異なるプラットフォームに送信アンテナ及び複数の受信アンテナを搭載する画像レーダ装置であって、前記送信アンテナ及び複数の受信アンテナは、レーダの移動に伴いレーダビームの指向方向を変化させながら観測する。また、送受信アンテナ間隔の2乗をレーダ波長と観測対象領域のレンジとの積の2倍で割ったものに円周率を乗じた位相を持つ複素関数が1とみなせるように、送受信アンテナ間隔、レーダ波長、観測対象領域までのレンジを設計する。
(もっと読む)
レーダ装置
【課題】受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行えるレーダ装置を提供する。
【解決手段】レーダ装置100は、受信系として、2つの受信アンテナ121、122と、受信アンテナ121、122から2つの受信信号を入力して両者を加算した和信号と両者の差である差信号を出力するハイブリッド回路123と、ハイブリッド回路123から和信号及び差信号を入力するスイッチ124と、スイッチ124から入力した和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部125とを備えている。2つの受信アンテナ121、122からの受信信号を、スイッチ124で切り替えることで1系列の受信部125で処理させるように構成している。
(もっと読む)
261 - 280 / 636
[ Back to top ]