
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
301 - 320 / 636
情報処理装置、情報入手装置、情報統合装置、制御装置および物体検出装置
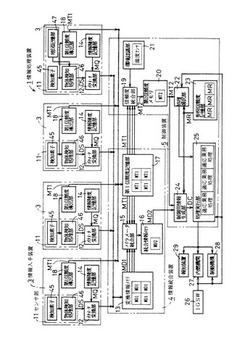
【課題】 情報処理装置の設計変更を容易にし、かつ汎用性を向上させる。
【解決手段】 車載される情報処理装置1において、車両周囲の被検知空間を区切った区画である複数のピクセルが設定されている。1台以上のセンサ部11は、被検知空間内の状況に関する検知情報DSを取得する。パラメータ変換部12は、センサ部11毎に、検知情報DSに基づいて、各ピクセル内の物体に関する第1パラメータを求めて各ピクセルに付与する。パラメータ統合部15は、ピクセル毎に、ピクセルに付与された第1パラメータを統合し、統合結果である第2パラメータを該ピクセルに付与する。処理実行部25は、全ピクセルの第2パラメータから成る統合情報MD2、または該統合情報MD2に基づく制御用情報DCを用いて、車両の制御に係る適応業務処理を行う。これによって、センサ部11の組合せに関わらず、情報統合のための処理が共通化される。
(もっと読む)
レーダー画像を使用して航空機の位置を求めるシステム及び方法

【課題】GPS信号を使用して正確に位置を求めることができない状況、又はGPS信号が利用可能でない状況において、航空機の位置を求める代替的なシステム及び方法を提供する。
【解決手段】航空機の位置を求めるように動作可能な測位システム及び測位方法。例示的な一実施の形態は、搭載メモリ116内に格納される事前捕捉画像202内の、既知の位置によって規定される少なくとも1つの物体を特定し、現在のレーダー画像302内の少なくとも1つの地上物体を特定し、現在のレーダー画像302内で特定された地上物体を、事前捕捉画像202内で特定された物体と相関付け、設置車両と事前捕捉画像202内の特定された物体との間の相対位置を求め、且つ事前捕捉画像202内の特定された物体の既知の位置と、求められた相対位置とに基づいて設置車両の位置を求める。
(もっと読む)
FM−CWレーダ装置
【課題】FM−CWレーダ装置において、受信機の飽和に起因して高調波成分が重畳されたビート信号から高調波成分を除去し、レーダビデオ信号のS/N比を向上すること。
【解決手段】ビート信号BSを、フーリエ変換手段7で、フーリエ変換して各周波数成分を周波数順に未補正ビデオ信号として出力し、次いで、ノイズ除去手段8で、未補正ビデオ信号に基づいて当該変調周期の閾値を求めて、未補正ビデオ信号から閾値を減算して補正済ビデオ信号を得て、1変調周期分の補正済ビデオ信号を周波数順にディスプレイ装置9へ出力する。
(もっと読む)
位置情報検出装置および位置情報検出方法
【課題】測定対象物に電磁波を照射することにより測定対象物からの反射波を受信して信号処理を行い、測定対象物の位置情報を求めるとき、簡易な装置構成で、高速で信号処理を行う。
【解決手段】2M−1(Mは自然数)の符号長さの符号化系列の信号の電磁波を測定対象物に照射し、そのときの反射信号と符号化系列の信号との相互相関関数を算出することにより、測定対象物の位置情報を求める。そのとき、幅×深さが2K×2L(K及びLは自然数)のサイズの2次元のメモリを用い、このメモリに、符号化系列の信号の値が、1つの符号化系列を1単位として複数単位記憶されている。このメモリの深さ方向のアドレス位置が呼び出し開始位置として指定されて、上記値がメモリの幅方向の順番に沿って呼び出され、照射する電磁波の符号化系列の信号が生成される。メモリ容量2K+Lは、(2M−1)・N+N(Nは自然数)である。
(もっと読む)
制御装置
【課題】駐車スペースの形状を算出するための処理負担を軽減できる制御装置を提供する。
【解決手段】制御装置は、車両1を基準として、所定角度毎(5度毎)に放射状に延びる線上に位置すると共に駐車スペース200を区画する各壁200b〜200dまでの距離を距離センサ26aにより検出し、その検出結果から駐車スペース200の形状を算出するので、カメラにより入力される画像を1画素ずつ解析して駐車スペース200の形状を算出する場合に比べて、制御装置のCPUの処理負担を軽減できる。
(もっと読む)
無線タグ通信システム、無線タグの電池残量推定方法及び監視装置
【課題】無線タグに新たな構成を追加することなく、センター装置側で無線タグの電池残量を的確に検知できる無線タグ通信システムを提供すること。
【解決手段】無線タグ110とタグリーダ120との距離を算出するタグ位置算出部123と、無線タグ110からの信号の受信レベルを検出する受信レベル検出部122と、前記距離と前記受信品質とに基づいて、前記無線タグの電池残量を判定する電池残量判定部131とを設けたことにより、無線タグ110に新たな構成を追加することなく、センター装置(タグリーダ120及び管理装置130)側で無線タグ110の電池残量を的確に検知できる無線タグ通信システム100を実現できる。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
障害物検知システム及び車両装置
【課題】障害物に接触することなく車両本体と開閉ドアとの間の障害物を確実に検知すること。
【解決手段】開閉ドア側の第1の位置にレーダー装置20又はトランスポンダTの一方が設けられ、車両本体側の第2の位置にトランスポンダT又はレーダー装置20の他方が設けられている。送信回路21は所定の周波数の送信信号を無線送信し、トランスポンダTの送受信回路は無線送信された送信信号を受けて、同一周波数かつ同一位相の返信信号を送り返す。受信回路21は返信信号を受信し、測定部22は送信信号及び返信信号の位相情報から距離情報を測定する。メモリ23には開閉ドアが全開状態でのトランスポンダTとレーダー装置20との距離に対応した距離情報が格納され、障害物検知部24は、測定部22が測定した距離情報とメモリ23に格納された距離情報とを比較して、これら距離情報が不一致の場合には障害物有りと判定する。
(もっと読む)
車両探索システム
【課題】携帯機を小型化すること。
【解決手段】車両側装置20は、車両の異なる位置に設けられた3本のアンテナ21と、各アンテナ21から所定の周波数の送信信号を送信すると共に携帯機30から返信される返信信号を受信し、送信した各送信信号及び受信した各返信信号とを比較して各アンテナ21と携帯機30との距離情報を測定するレーダー回路22と、測定した距離情報から車両側から見た携帯機30の方角又は当該携帯機30から見た車両の方角を表す方位情報を検出する方位検出手段24とを備え、方位情報を含んだ情報を携帯機30へ送信する。携帯機30は、1本のアンテナと、車両側装置20から送信された送信信号を受信して送信信号と同期した返信信号を送り返すと共に、車両側装置20から送信された方位情報を含んだ情報を受信するトランスポンダと、方位情報に基づいて車両の方向に関する情報を出力する情報出力手段と、を備えた。
(もっと読む)
地中レーダ
【課題】地中の掘削作業に先立って埋設状況を調査する際に、埋設物の位置を探知するだけでなく、地中の埋設物が金属物体か非金属物体かを識別可能とする地中レーダ。
【解決手段】地中に向けて電磁波を送出する電磁波送信部4と、送出された該電磁波に基づいて反射された電磁波を受信する電磁波受信部5とを有し、該電磁波受信部5によって受信された電磁波に基づき地中に埋設された埋設物9を探知する地中レーダ1において、前記電磁波受信部5で受信された電磁波の受信波形19と前記電磁波送信部4から送出される電磁波の送信波形12との相互相関処理、及び該受信波形19の自己相関処理を行う相関処理部22と、前記相関処理部22により得られる相互相関値と自己相関値との比率を算出し、算出した該比率に基づいて前記地中に埋設された埋設物9が金属物体であるか非金属物体であるかを識別する識別部7とを備えた構成とした。
(もっと読む)
電波探知装置
【課題】外来ノイズやCWを受信するような環境下においても、到来電波源に対するパルス検出機能が正常に働くようにする。
【解決手段】第1の振幅記憶部41の閾値Th1とTh2の間にノイズ検出閾値Th3を設け、振幅記憶時間測定部80は、第1の振幅記憶部41において振幅電圧の記憶値がノイズ検出閾値Th3を超え、以降一定時間パルス開始閾値Th1を上回らず、またパルス終了閾値Th2を下回らない状態が続いた場合には、閾値設定部70に対して、第2の処理系によるパルス検出処理切り替え指示を出し、閾値設定部70は、上記指示に応じてパルス検出処理を第2の処理系に切り替えると共に、第2の振幅記憶部42のパルス開始閾値Th1’とパルス終了閾値Th2’を第1の振幅記憶部41で測定した振幅電圧の記憶値の最大値を考慮して設定する。
(もっと読む)
水栓装置
【課題】
本発明は、使用者が水栓装置を使用する行為のみを確実に検知し、且つ水栓装置から供給される吐水を使用者が欲するタイミングで供給可能である水栓装置を提供する。
【解決手段】
本発明の水栓装置は、吐水口と、放射した電波の反射波によって被検知体の移動に関する情報を取得するセンサ部と、前記センサ部からの検知信号に基づいて吐水口への吐水供給の有無を切り替えるバルブの開閉制御を行う制御部と、を備えた水栓装置であって、前記制御部は、前記検知信号を記憶するメモリ部を有し、前記センサ部から得られる検知信号が所定の第1状態になったことを判定する第1判定が行われた際に、前記メモリ部に記憶された前記第1判定より所定時間前の検知信号の状態に基づきバルブの開閉制御を行うことを特徴とする構成。
(もっと読む)
状況表示装置
【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】移動物体の位置推定精度の向上を図る位置推定装置及び位置推定方法を提供する。
【解決手段】運動パラメータ選択部202が移動物体のID情報に対応する移動物体の属性情報と、位置情報に対応するフロアの属性情報とをデータベース部112から取得し、取得した属性情報に基づいて、最適な運動パラメータを選択する。分布更新部203は、分布パラメータ保持部204に保持された一つ前の時刻における移動物体の位置の分布パラメータ、位置情報、選択された運動パラメータを用いて、現在の時刻における移動物体の位置の分布パラメータを算出し、最尤位置算出部205は、算出された移動物体の位置の分布パラメータから移動物体の位置として最も確率が高い位置を算出する。
(もっと読む)
電波測角アンテナ、これを備えた電波測角装置、及び飛しょう体
【課題】従来のレドーム内に設置される電波測角アンテナでは、レドームの影響を受けるため正確な入射角が計測できないという問題がある。
【解決手段】そのために、本発明の電波測角アンテナは、同一の面に配設された複数の計測アンテナと、前記計測アンテナに対して交差する方向に配設された複数の補助アンテナとを備えたことを特徴とする。これにより、補助アンテナにより入射方向を算出し、その情報を用いて、計測アンテナの誤測角を低減するものである。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でターゲットを一旦ミスペアリングした場合に、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 今回ペアリング候補選定手段S9は、今回相対関係および前回相対関係が同一の物体に基づくものか否かを判定し、同一の物体に基づくものと判定された場合に、今回相対関係の算出および前回相対関係の算出に用いられたペアリング候補を正しいペアリング組み合わせとして確定する。ペアリングフィードバック処理手段S10は、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、組み合わせが確定していないペアリング候補に基づいて前回相対関係を更新する。このように、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、前回相対関係に遡って今回相対関係の正誤を検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法
【課題】アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法を提供する。
【解決手段】主に、検出システムの処理サブシステムから供給されるブリップを、トラック生成のために解析する前に、格付けすることを可能にする方法からなり、各トラックは、検出された移動目標の軌道を表すと仮定される。解析継続時間が考慮され、解析継続時間の間に検出されたすべてのブリップが考慮される。これらのブリップは、サブセットに分割され、各サブセットは、初期位置および速度ベクトルで定義された同一解析チャネルにおいて解析継続時間の間に検出されたブリップに対応する。このように形成されたサブセットは、グループ分けされ、同一グループが、複数の属性の結合されたアサーションが妥当と判断されたブリップを含むサブセットを結合する。
(もっと読む)
動的構成可能な非干渉信号処理を伴う監視システム
【課題】動的構成可能な非干渉信号処理を伴う監視システムを提供する。
【解決手段】機械105の動作管理に関するデータと、機械105の安全管理に関するデータとが、相互に干渉しないよう重ね合わせられる。機械105に生じる状態を示す生データを取得し、生データから複数の波形を生成し、波形により生データの周波数情報を視覚的に表現し、動作管理に関する測定値及び安全保護に関する測定値が決定されるよう、波形に対して実行される信号処理操作を定義するデータパスを形成するよう、信号処理ブロックを動的にリンクさせる。
(もっと読む)
距離測定装置
【課題】無線信号の送受信によって対象物までの距離を求める距離測定装置において、距離測定精度を向上させることを目的とする。
【解決手段】距離測定装置10は、距離測定対象の無線タグとの間の予備的な無線信号送受信により、その無線タグから送信される直接波信号およびマルチパス信号の各到来方向を推定する。そして、直接波信号の到来方向にアレイアンテナの指向性最大方向が向けられ、マルチパス信号の到来方向にアレイアンテナの指向性ヌル方向が向けられるようアレイアンテナの指向特性を制御する。距離測定装置10は、指向特性制御されたアレイアンテナを介して無線信号の送受信を行い、無線タグまでの距離を測定する。
(もっと読む)
マイクロ波検出器
【課題】 従来の方法よりも確実に誤警報源を識別することができ、初めて通過する誤警報源の前でも、正規のマイクロ波検出に伴う警報の出力を抑制すること
【解決手段】 所定のマイクロ波を検出するマイクロ波検出手段(12,14,16)と、その逓倍マイクロ波を検出する逓倍マイクロ波検出手段(22,24,26)と、を備え、解析判定部30は、2つの検出手段の出力に基づき、同一タイミングで基本波となるマイクロ波とその逓倍マイクロ波を受信した場合にはマイクロ波検出手段で件支出したマイクロ波は誤警報源からのマイクロ波と判断し、警報表示部42,警報音出力部44を用いた正規の警報を抑制する制御を行う。
(もっと読む)
301 - 320 / 636
[ Back to top ]