
国際特許分類[G01S15/74]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 音波の再放射を使用する方式,例.IFF,すなわち敵味方識別装置 (58)
国際特許分類[G01S15/74]に分類される特許
51 - 58 / 58
受動超音波RFIDエレベータ位置決め基準システム
信号(25)を送り出すようにした電磁送信機および音響信号(23)を受け取るようにした音響受信機(21)を含む複数のトランスポンダ・モジュール(11)を含む、移動部材(33)の位置を測定する装置であって、これらの複数のトランスポンダのうちの少なくとも2つを、この測定される位置の周りに配置している装置。  (もっと読む)
(もっと読む)
位置検出システム、発信装置、サーバならびに同システムにおける無線信号の衝突回避方法
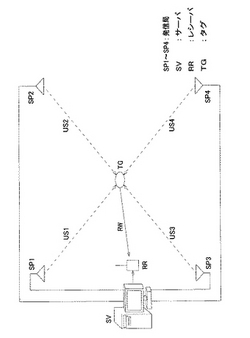
【課題】 無線信号の衝突を回避しつつタグの消費電力を軽減する。
【解決手段】 第1の無線信号を受信後、第2の無線信号を送信するまでに、タグ(TG)固有の待機時間を入れ、送信時間をシフトすることにより、あるいは、タグが第1の無線信号の電界強度を測定し、電界強度が小さいときに待機時間を短く設定し、その情報を含めてサーバへ第2の無線信号を送信することにより、サーバ(SV)は、タグから受信した第2の無線信号が示す符号から待機時間を算出する。また、第1の無線信号に信号を入れ、タグがその情報を読みルールに従い第2の無線信号を送信するか否かを決定することで衝突回避してもよい。
(もっと読む)
海中センサ集合システム、基地局、および最適航法装置

【課題】魚群の存在を検知し、今現在の魚群の位置に関する情報を取得することが可能な海中センサ集合システム、海中センサ集合システムから魚群に関する情報を取得する基地局、および当該基地局から取得した魚群に関する情報に基づいて漁船を誘導する最適航法装置を提供する。
【解決手段】海中センサ装置3は超音波レーダを備え、ある頻度で超音波パルスを送信する第1の動作状態と、当該頻度よりも高い頻度で超音波パルスを送信する第2の動作状態のいずれかで動作する。海中センサ装置3は第1の動作状態で魚群を検知して報知信号を基地局4に送信する。基地局4は、報知信号に基づいて第2の動作状態とすべき海中センサ装置3を指定し、動作指令信号を海中センサ集合システム2に送信する。動作指令信号を受信し、自らが指定されたと認識した海中センサ装置3は、第2の動作状態での動作を開始する。
(もっと読む)
機器艤装船舶
【課題】コンパクトな構造で、かつROVの位置の検知精度が向上する。
【解決手段】推進機を備え、測量や調査等に用いるROVの位置を検知するトランスポンダと、3個以上のトランスデューサを船体に艤装する機器艤装船舶であり、トランスデューサを取り付けた支持部材と、支持部材を直線状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の内部に位置させ、使用時に直線状に移動させて船体の開口部から斜め側方へ突出して水中へ入れる。また、トランスデューサを取り付けた支持部材と、支持部材を円弧状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の幅より内側に位置させ、使用時に円弧状に移動させて船体の幅より外側の水中へ入れる。
(もっと読む)
低コストの音響応答器位置測定システム
位置測定システムは、囲まれた3次元空間(100)においてタグの位置を決定するために音響信号を使用して通信する基地局(120,200)及び応答器タグ(140,250)を含む。前記基地局は、特定のタグの識別子と共に符号化された要求信号(310)を送信する。前記特定のタグは、固定の遅延(t2−t1)の後に音響応答信号(330)を用いて応答する。前記基地局は、受信されたラインオブサイト信号(330)及びその反射(340)に基づいて前記タグの位置を決定する。前記応答信号は、前記タグのステータスを含むデータ、又は関連したセンサ(270)若しくはアクチュエータ(280)からのデータと共に符号化されてもよい。前記要求信号は、前記タグ又は前記関連したセンサ及びアクチュエータを制御するデータと共に符号化されてもよい。電力管理方式が前記タグにより実行されてもよい。  (もっと読む)
(もっと読む)
ICタグのロケーション認識装置および方法
質問器1が、固有ID、Xa、Xb、Xcを読み取った後、IDを指定してプローブ信号発信コマンドを送信する。該当のICタグはそれぞれプローブ信号を順番に発信する。隣接するICタグ2は、質問器が指定したID,Xa、Xb、Xcを隣接IDとしてメモリに保存する。次に質問器1は隣接IDを読み取る。コントローラは、固有ID、Xa,Xb、Xcと隣接ID(Xb),(Xa・Xc)、(Xb)の組み合わせ(Xa−Xb)、(Xb−Xc)を求める。最後に繋ぎ合わせて(Xa−Xb−Xc)を得る。 (もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
水中位置測定方法および装置
51 - 58 / 58
[ Back to top ]