
国際特許分類[G01S15/74]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 音波の再放射を使用する方式,例.IFF,すなわち敵味方識別装置 (58)
国際特許分類[G01S15/74]に分類される特許
21 - 30 / 58
超音波による波浪計測方法および波浪計測システム
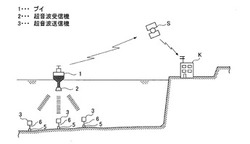
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に係留されたブイ1の海面下に設けられた超音波送受信機2から海中に超音波を発信すると共に、ブイの下方の海面下に配置された3つのトランスポンダ3からの超音波を時刻信号と一緒に受信し、トランスポンダから発信した超音波を受信するまでの片道伝播時間に基づき各トランスポンダと超音波送受信機との間の距離を検出し、この距離データにハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機のトランスポンダに対する方位角及び俯角を係数とする超音波送受信機の三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成すると共に、この三元一次連立方程式を解いて少なくとも短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 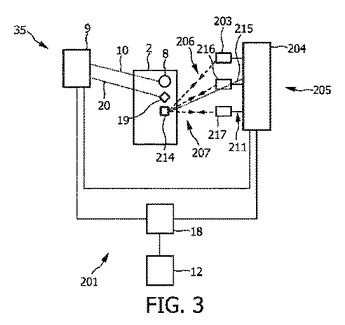 (もっと読む)
(もっと読む)
駐車位置探索システム

【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
マルチオブジェクト測位システムおよび電力制御ベースの多重アクセス制御方法
【課題】既存のENとHNの問題を効果的に解決し、かつ信号の衝突を解決し、システムの時空間再使用性能を改善することが可能である多重アクセスコントロール方法を提供。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
位置検知システム
【課題】移動体の位置を検知する。
【解決手段】送信時刻情報を含むパケットを受信する手段と、パケットを受信してから一定経過時間後に、受信したパケットと同一内容のパケットを送信する手段とからなる移動ノードと、送信時刻情報を含むパケットを送信する手段と、移動ノードが送信したパケットを受信する手段と、受信パケットに含まれる送信時刻情報と、該パケットを受信した時刻情報と、一定経過時間情報とに基づいて、移動ノードとの距離を求める手段とからなる第1の固定ノードと、第1の固定ノードが送信したパケットを傍受する手段と、移動ノードが送信したパケットを傍受する手段と、傍受した2つのパケットの受信時間差に基づいて、移動ノードとの距離を算出する手段とからなる複数の第2の固定ノードと、第1の固定ノード、複数の第2の固定ノードのそれぞれと移動ノードとの距離情報とに基づいて移動ノードの位置を算出する手段とを備えた。
(もっと読む)
管制型水中情報収集システム及び水中航走体管制システム
【課題】水中航走体による水中情報の収集効率を低下させることなく、一定の精度で位置検出を行うことができるとともに、また、複数の水中航走体を管制することで、効率よく水中情報を収集すること。
【解決手段】絶対位置取得部10により水上移動体3の絶対位置を取得するとともに、相対位置計測部11により水中航走体4の相対位置を計測し、これらの情報から水中航走体4の絶対位置を検出する。そして、この絶対位置情報を第1通信部13から第2通信部22へ送信することにより、水中航走体4に対して絶対位置情報を通知する。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】高精度、配置しやすさ、較正不要、低コスト、装置内調整および柔軟性などの利点がある、対象の所在確認および追跡を行う単一装置上の位置決定機能(POD)、自律型超音波屋内追跡システム(AUITS)を提供する。
【解決手段】AUITSは、RF信号および超音波信号を送信するためのRFトランシーバ205および超音波送信器206を含み、移動する対象に設置されたタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し、移動する対象の所在を確認するPOD202とを備える。PODは、複数のリーフモジュール207から構成され、各リーフモジュールに位置信号の受信器208があり、タグ装置から送信された位置信号を受信し、リーフモジュール間に既知の構造トポロジー関係がある。次に、各位置信号受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、対象の位置が計算される。
(もっと読む)
位置情報検出システム
【課題】 同時に複数のICタグの位置情報を把握できる位置情報検出システムを提供する。
【解決手段】 無線又は赤外線信号をトリガとして超音波を出力する複数のタグと、これらのタグから出力された超音波が入力されると共に、複数の前記タグから超音波が到達するまでに要した時間を計測する複数の基地局と、これらの基地局から入力される超音波到達時間情報に基づいて、複数の前記タグの位置を把握する管理コントローラを備えた位置検出システムにおいて、
複数の前記タグは所定の周波数の超音波を発生する超音波発生手段を備え、
複数の前記基地局は受信した複数の周波数の超音波を周波数毎に選別する周波数選別手段を備え、
前記管理コントローラは、
複数の前記タグと使用する超音波周波数の対応関係を記憶した管理テーブルと、
複数の前記基地局から入力される超音波到達時間情報から複数の前記タグの位置を、三角測量を用いて計算する制御部と
を備える。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、周期的に切替えられる複数のアンテナから発信される高周波信号を携帯端末により受信して相対位相を算出し携帯端末の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための装置およびプログラムに関するものである。
【構成】基地局1において、複数の指向性アンテナ11a〜11dの間隔を1波長以下として周期的に切替えながら高周波信号を発信し、前記指向性アンテナ11a〜11dの指向性の方向を斜め下方に向けて角度を持たせて設置し、携帯端末2により受信される高周波信号の位相差を測定して携帯端末2の相対的な位置関係を高精度で検知するための計算式を開示する。
(もっと読む)
21 - 30 / 58
[ Back to top ]