
国際特許分類[G01S15/74]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 音波の再放射を使用する方式,例.IFF,すなわち敵味方識別装置 (58)
国際特許分類[G01S15/74]に分類される特許
11 - 20 / 58
水中航走体の航走制御方法及び装置
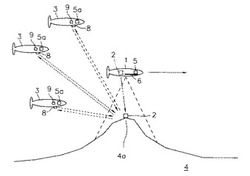
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
建設機械と作業員との接触事故防止システム

【課題】 通常の建設機械と作業員との接触事故の防止を図るとともに、重機の周囲で作業する作業員が他の重機のオペレータとして作業するような場合を想定してた場合にも、危険状態の誤認、警戒信号鳴動等の誤動作が生じないようにする。
【解決手段】 建設機械側10と、その信号到達範囲を監視エリアA1,A2とした際に、監視エリアA1,A2内にいる作業員W側との間で、近接危険情報を交信し、必要に応じた警報を発する応答警報手段を備えた建設機械10と作業員Wとの接触を防止するシステムにおいて、建設機械10とは別の他の建設機械10’に、作業員W側からの応答信号発信を停止させる信号キャンセル手段15を備える。そして作業員Wが操縦者Dとして他の建設機械10’へ搭乗する場合に、信号キャンセル手段15を用いて応答信号発信を停止して誤信号の発信を防止する。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響通信が不安定でも位置較正を実施できるようにする。
【解決手段】 水中航走体を、慣性航法位置に累積誤差がなくて精度が高い状態のときに、緯度方向と経度方向の各アップデート用経路22,23に沿って航走させながら、支援船側より音響測位を行い、得られた音響測位位置24aの緯度成分の代表値を緯度方向基準値25、音響測位位置24bの経度成分の代表値を経度方向基準値26とする。その後、慣性航法位置に誤差が累積した水中航走体を、緯度方向と経度方向の各位置アップデート用経路22,23に沿って再び航走させ、この際、支援船側からの音響測位で得られる音響測位位置27aの緯度方向の代表値28、及び、音響測位位置27bの経度方向の代表値29を、緯度方向と経度方向の各基準値25,26と比較して緯度方向と経度方向の偏差δx、δyを求める。この偏差δx,δyにより水中航走体の慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
ホースラインの形状検出システム
【課題】海中に配置されているホースラインの形状確認を行うことができ、しかも油の給送が行われている間や海象条件が悪い時でも正確な形状確認を行うことのできるホースラインの形状検出システムを提供する。
【解決手段】検出装置20から5.5kHzの音波が海中に向かって発信され、その音波に応答して各トランスポンダ10,11からそれぞれ所定の周波数の音波が発信され、検出装置20によって各トランスポンダ10,11との距離及び検出装置20に対する各トランスポンダ10,11の配置されている方向が検出される。また、検出装置20の検出結果に基づいて各トランスポンダ10,11の位置座標が前記所定時間おきに制御ユニット30によって演算されるとともに、前記所定時間おきに記憶装置31に記憶される。
(もっと読む)
11 - 20 / 58
[ Back to top ]