
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
181 - 190 / 1,802
無線通信システム、及び移動局、並びに基地局
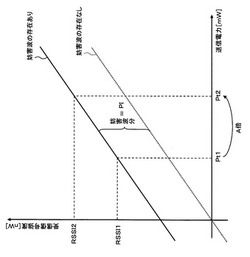
【課題】妨害波が存在する電波環境であっても、移動局からの電波信号の真の受信信号強度値を基地局で検出する。
【解決手段】移動局10と、複数の基地局12A〜Dとを有し、移動局10は、互いに所定の出力比となる複数の出力値を含む電波信号を送信し、各基地局12A〜Dは、受信された電波信号に基づき、複数の出力値にそれぞれ対応した複数の受信信号強度値を検出するRSSI部47を備える無線通信システム8であって、上記出力比と、上記複数の受信信号強度値とに基づき、各基地局ごとに妨害波の受信信号強度を算出し、算出した妨害波の受信信号強度と、所定のしきい値とを比較する。
(もっと読む)
ネットワークにおいて位置特定されるデバイスのロケーションを求めるための方法及び装置、並びにそのコンピュータプログラム

【課題】既知のロケーションを有する一群のデバイスを含むネットワークにおいて位置特定されるデバイスのロケーションを求めるための方法を提供する。
【解決手段】少なくとも1つの送信信号の到達時刻を得るステップ、到達時刻の少なくとも一部について、各到達時刻についてのパラメータを求めるステップ、求められた各パラメータについて、2つの拡張パラメータを求めるステップ、各nタプルの拡張パラメータについて、既知のロケーションを有する少なくとも2つのデバイスの位置及びnタプルの拡張パラメータを考慮する関数から点の集合を求めるステップ、既知のロケーションを有する各デバイスの位置及びすべての拡張パラメータを含む条件を満たす、求められた点の集合のうちの点を選択するステップ、並びに選択された点から、位置特定されるデバイスのロケーションを求めるステップ、を含む。
(もっと読む)
測位システム
【課題】新たな無線機を別途設けることなく電波伝搬環境に対応した補正を行い、測位精度を向上する。
【解決手段】社員P1〜4に関連づけられ移動局10A〜Dと、複数の基地局12A〜Dと、移動局10の測位処理を行う測位サーバ14とを有する。測位サーバ14は、測位処理による移動局10A〜Dの位置データの時間的蓄積に応じて、測位処理結果を補正するための補正値を算出し、その補正値の算出後、当該補正値に基づき、新たに測位された移動局10A〜Dの位置データの補正を行う。
(もっと読む)
移動体監視装置、移動体監視方法、移動体監視システムおよびコンピュータプログラム
【課題】複数の移動通信端末が同一の局所領域に位置しているときは通報を回避する移動体監視装置を提供する。
【解決手段】移動体監視装置30は、第1移動通信端末の位置情報(第1位置情報)が予め登録した監視エリア情報に含まれるか否か判定する現在位置判定部33と、第1位置情報と第2移動通信端末の位置情報(第2位置情報)とを照合することにより第1移動通信端末および第2移動通信端末が同一の局所領域に位置しているか否か判定する同位置判定部34と、第1位置情報が監視エリア情報に含まれないとき、かつ第1移動通信端末および第2移動通信端末が同一の局所領域に位置していないとき、第2移動通信端末および予め設定された他の端末のうち少なくとも一つにアラームを送出する通報部35と、を備えている。
(もっと読む)
測位システム、測位方法及び測位プログラム
【課題】 より短い時間で受信機の状態に応じた測位結果を得る。
【解決手段】 測位サーバ10は、セルラ通信機能とGPS測位に用いられる信号の受信機能とを有するセルラ端末20の位置を推定する測位システムである。測位サーバ10は、セルラ端末20におけるセルラ通信に関する情報を取得する無線通信情報取得部14と、無線通信に関する情報に基づいて、GPS測位の有効性を推定する有効性推定部15と、推定された有効性に基づいて、セルラ端末20のGPS測位の実行を制御するGPS測位制御部17と、を備える。
(もっと読む)
GPS時計装置、及びその使用地域特定方法
【課題】GPS時計装置において、使用地域の特定時における使用者の作業負担を軽減する。
【解決手段】装置内に、互いに対応する都市名、時差、緯度、経度、面積、人口からなる時差取得テーブル101のデータを記憶しておく。現在時刻を取得する際には、GPS信号を受信し、その受信位置と、GPS信号に含まれる時刻情報により示される時刻を取得する。時差取得テーブル101から、緯度・経度で示される位置が受信位置から所定の距離範囲内にある都市名を検索し、それが複数である場合には、それら複数の都市名を選択候補として表示し、いずれかの都市名を使用者に選択させ、選択された都市名に対応する時差によって、取得した時刻を補正する。複数の都市名を選択候補として表示するときの表示順を、各都市名に対応する人口が多い順、又は各都市名に対応する面積が多い順として、使用者による都市名の選択作業を容易にする。
(もっと読む)
音響計測用観測船及び音響計測システム
【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
基準信号発振装置
【課題】使用する無線通信の周波数帯が変更された場合に、基準信号の周波数の精度を容易且つ適切に変更することである。
【解決手段】GPS信号を受信してUTCに同期した時間信号を取得するGPSユニット52と、基準信号を発振する基準信号ユニット40と、基準信号ユニット40により発生された基準信号のパルス数を測定する測定時間、又は基準信号の周波数の精度の操作入力を受け付ける操作ユニット53と、GPSユニット52により取得された前記時間信号に基づいて、操作ユニット53により入力された測定時間、又は前記入力された精度に対応する測定時間をカウントするとともに、当該測定時間内の前記基準信号のパルス数を測定し、正確なパルス数からの前記測定したパルス数の誤差をなくすように基準信号ユニット40が発生する基準信号の周波数を補正する制御ユニット51と、を備える。
(もっと読む)
GPS時計装置及びその時刻取得方法
【課題】GPS信号に含まれる時刻情報を用いた現在時刻の取得に要する時差情報を自動的に得る場合における消費電力や所要時間を削減することを可能にする。
【解決手段】採用されている標準時が互いに異なる各々の地域を示す位置情報であって、GPSの基準であるECEF直交座標系による位置情報と、GPSの基準であるUTCに対する各地域の標準時における時差情報とを対応して都市情報記憶部4に予め記憶しておく。現在時刻の取得時には、GPS受信部3がECEF直交座標系により表わされた位置情報を取得する。制御部7は、その位置情報に対応する時差情報を都市情報記憶部4から直接的に取得し、取得した時差情報を用いてGPS信号に含まれる時刻情報により示される現在時刻を補正する。現在時刻の取得に本来不用なECEF直交座標系から測地座標系への位置情報の変換処理を無くして消費電力や所要時間を削減する。
(もっと読む)
衛星バイアスおよび受信機バイアスの推定方法
【課題】航法衛星および衛星信号受信機のそれぞれに起因する周波数間バイアスを推定する。
【解決手段】複数周波数の衛星信号を送信する航法衛星から放送される群遅延情報から得られる放送衛星バイアスにより、各航法衛星までの位相距離の周波数間の差である周波数間差分を補正し、各航法衛星における補正した周波数間差分の最小値である最小周波数間差分のうち最頻出の値を基準衛星バイアスとし、各航法衛星における最小周波数間差分と基準衛星バイアスとの差により衛星放送バイアスを補正して衛星バイアス推定値を算出し、この衛星バイアス推定値、および電離層電子密度分布モデルから推定されるTEC値から受信機バイアス推定値を算出する。
(もっと読む)
181 - 190 / 1,802
[ Back to top ]