
国際特許分類[G01S7/524]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ15/00による方式のもの (803) | パルス方式の細部 (327) | 送信機 (84)
国際特許分類[G01S7/524]に分類される特許
1 - 10 / 84
超音波センサ
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
超音波センサ
【課題】超音波センサにおいて、自装置の異常を判別して、障害物に関する正確な情報を得る。
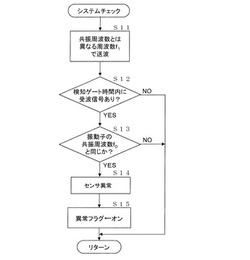
【解決手段】送波駆動回路が、振動子の共振周波数とは異なる周波数f1で振動子を駆動する(S11)。この結果、検知ゲート時間内に、受波増幅回路から受波信号が入力されたときに(S12でYES)、この受波信号の周波数が、共振周波数f0と同じである場合に限り(S13でYES)、超音波センサが異常と判定される(S14)。ここで、周波数f1で振動子を駆動したときに、検知ゲート時間内に共振周波数f0の受波信号が入力された場合、その受波信号は、残響信号とみなせる。そして、検知ゲート時間内に残響信号が入力されたということは、超音波センサに、振動子に寄生する振動部が生じていることに起因する異常が発生していることを意味する。従って、S11〜S14のような処理を行うことにより、超音波センサが異常であるか否かを正確に判別できる。
(もっと読む)
超音波発生デバイスおよび超音波発生装置

【課題】 残響特性に優れた超音波発生デバイスを提供する。
【解決手段】 超音波発生デバイス100は、駆動信号が印加されることにより、振動して超音波を発生させる圧電振動子1を備え、圧電振動子1に印加される駆動信号は、圧電振動子1の共振周波数をfr、駆動パルス数をnp、駆動パルスの周波数をfpで表したとき、次の式を満たす。
0.98・fr/(1+1/np)≦fp≦1.02・fr/(1+1/np)
(もっと読む)
障害物検知装置
【課題】障害物検知装置において、障害物までの距離を正確に検知できるようにする。
【解決手段】障害物検知装置1は、超音波を送受信する複数の超音波センサ2と、複数の超音波センサから2の超音波の送信を制御する制御部5と、複数の超音波センサ2の受信信号に基いて、障害物を検知し、障害物までの距離を計測する距離演算部4とを備える。制御部5は、距離演算部4により計測された障害物までの距離が所定の距離より遠い場合、又は、距離演算部4により障害物が検知されない場合に、複数の超音波センサから同じタイミングで超音波を送信する動作を繰り返す同時送信動作を行わせる制御を行う。これにより、全ての超音波センサ2は、他の超音波センサ2からの直接波の受信完了後に、障害物からの反射波を受信することになる。従って、超音波センサ2からの直接波の影響を受けることなく、障害物を検知することができる。
(もっと読む)
多重検知装置及びその方法
【課題】多数の超音波センサーが互いに異なる送信周波数を使用するようにして単一の分析集積回路を使用できるようにした多重検知装置及びその方法を提供する。
【解決手段】該当送信周波数の超音波信号を発信する送波部110と、送波部110から発信した超音波信号を受信して出力する受波部130を備えた多数の超音波センサー100と、多数の超音波センサー100の各送波部110に対して該当送信周波数の超音波信号を発信するように制御し、各受波部130から出力した超音波反射信号を受信して発信時間と受信時間との時間差を利用して超音波センサー100が検知した物体の距離を計算して出力する分析集積回路200と、を含む。
(もっと読む)
超音波格子化3次元電子化撮像装置
【課題】周波数ごとに異なる方向に超音波を掃引照射する1次元配列の送波器による3次元撮像方式は知られている。しかし、この方法によると、2次元収束音響レンズが必要となり、2次元収束音響レンズは重量物となるため、装置の簡易化に困難を感じている。
【解決手段】本発明は、周波数により一次元方向を走査する構成において、単一位相板あるいは反転位相板を使用することにより、1次元配列の送波器と1次元配列の受波器による、重量物となる2次元収束音響レンズを必要としない簡便な3次元撮像方式を提供する。
(もっと読む)
アラーム発生装置、超音波探知装置、アラーム発生方法、超音波探知方法、アラーム発生プログラム、超音波探知プログラム
【課題】ユーザの所望とする魚種が検出されたときにのみ、正確且つ適切に、ユーザへ通知を行う。
【解決手段】超音波パルス信号のエコー信号から探知データを生成する(S101)。探知データに基づいて魚群(単体魚)エコーの検出、深度、底質等の魚種によって特徴が異なる判定用情報を検出する(S102)。魚種に応じて予め設定された複数のアラーム発生条件毎に、判定用情報を検証する(S103)。複数のアラーム発生条件のうち一つでも判定用情報によって満たされていなければ、アラームは発生しない(S104:No)。一方、全てのアラーム発生条件が判定用情報によって満たされていれば(S104:Yes)、アラームを発生して放音する(S105)。
(もっと読む)
距離検出システム
【課題】測定側機器からの発呼信号とこれに対応する応答機器からの応答信号とにそれぞれ特徴を持たせることによって、応答機器までの距離の算出を可能とする。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
(もっと読む)
超音波距離測定システム
【課題】第1の装置は、第2の装置への超音波の送信より第2の装置からの応答の超音波の受信までの時間の計測値と音速とに基づいて、第1の位置と第2の位置との間の距離を測定するシステムにおいて、第1の装置の送信波の周波数又はパルス数を第2の装置と異なる値に設定することなく、周囲に存在する物体からの反射波に起因する誤測定を防止する。
【解決手段】親機(第1の装置)は、子機(第2の装置)へ超音波102を送信し、子機2は、親機からの送信波を受信し(受信波202)、一定時間T2経過してから、応答波204を送信する。親機は、超音波102の送信後、一定時間T2経過してから、子機からの応答波を検出する。超音波102が周囲の物体で反射し、親機に到達する受信波103、105を子機からの応答波と誤らない。親機は、時間(T4−T2)と音速を基に、子機までの距離を測定する。
(もっと読む)
水中探知装置、魚群探知機、水中探知方法及びプログラム
【課題】一の装置で、魚又は水深検出及び底質判別の両方を精度よく行うことができる水中探知装置、魚群探知機、水中探知方法及びプログラムを提供する。
【解決手段】魚群探知機1は、送信部14で魚群探知用の送信信号と海底の底質判別用の送信信号とを生成する。生成した送信信号を送受波器16へ出力し、魚用超音波と海底用超音波を送波し、その反射波を受波する。このとき、魚群探知機1は、受波した反射波に係る海底エコーのパルス幅が、魚エコーのパルス幅よりも長くなるようにして、各エコーから、信号処理部19において魚群探知及び海底の底質判別を行う。
(もっと読む)
1 - 10 / 84
[ Back to top ]