
国際特許分類[G05B13/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 適応制御系,すなわちあらかじめ指定された規準に対して最適である行動を行なうようにそれ自体を自動的に調整する系 (1,027)
国際特許分類[G05B13/00]の下位に属する分類
電気式 (992)
国際特許分類[G05B13/00]に分類される特許
11 - 20 / 35
内燃機関の燃料噴射制御装置
【課題】内燃機関の運転状態の検出結果の信頼性が低下し、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、安定した燃焼状態を確保でき、燃焼時のノイズを抑制することができる内燃機関の燃料噴射制御装置を提供する。
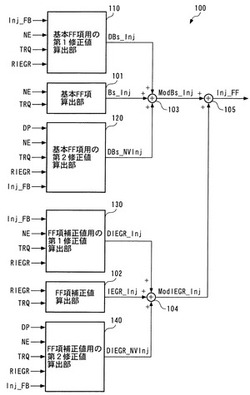
【解決手段】制御装置1の噴射時期コントローラ30は、実着火時期Cmbを目標着火時期Cmb_TRGTになるように、FB項Inj_FBを算出し、図7,8のマップから算出した値Bs_Inj,IEGR_Injと、4つの修正値DBs_Inj,DBs_NVInj,DIEGR_Inj,DIEGR_NVInjとを加算することにより、FF項Inj_FFを算出し、FF項Inj_FFにFB項Inj_FBを加算することにより、目標噴射時期Inj_TRGTを算出する。2つの修正値DBs_Inj,DIEGR_Injは、追従誤差EIgが値0になるように算出される。
(もっと読む)
制御装置

【課題】入出力特性が刻々と変化するプラントに対して高い制御性能を維持できる上、一部の制御出力の偏差を見かけ上0とする特定の状況下においても有利な制御入力を再現できるような制御装置を実現する。
【解決手段】第一の制御出力とその目標値との偏差の時間積分x1z及びそれ以外のものx1y、並びに、第二の制御出力とその目標値との偏差の時間積分x2z及びそれ以外のものx2yを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、第二の制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該第二の制御出力に係る状態変数x2z及びx2yについての多項式S2zx2z+S2yx2yを0とする補正制御部52とを具備する制御装置5を構成した。
(もっと読む)
制御装置
【課題】制御出力とその目標値との偏差の時間積分を状態変数とし、その状態変数を参照して線形入力及び非線形入力を反復的に演算するスライディングモードコントローラを利用して内燃機関またはそれに付帯する装置を制御する際に、前記状態変数に基づき算出される切換関数ベクトルの絶対値の増大を防ぎ、過渡域での制御性及び排気の改善を図る。
【解決手段】内燃機関またはそれに付帯する装置を制御する制御装置(ECU)に、スライディングモードコントローラと、状態変数に基づき算出される切換関数ベクトルが所定の変化量だけ変化したと仮定したときに生じる前記非線形入力の変化量に対応する制御出力の変化量の絶対値が所定の閾値を下回るという条件が成立した際に状態変数の更新を停止するとともに、状態変数の更新を停止している期間において制御出力とその目標値との偏差の正負が変化した際に状態変数の更新を再開する補正制御部とを備える。
(もっと読む)
制御装置
【課題】一部の制御出力の偏差を見かけ上0とする特定の状況下において、有利な制御入力を再現できるようにする。
【解決手段】内燃機関またはこれに付帯する装置に係る複数の制御出力をそれぞれの目標値に追従させる制御を実施するものであって、制御出力とその目標値との偏差の時間積分xz及びそれ以外のものxyを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、ある制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該制御出力に係る状態変数xz及びxyについての多項式Szxz+Syxyを0とする補正制御部52とを具備する制御装置5を構成した。ここで、Szは切換超平面を構成する行列Sの成分のうち前記状態変数xzに乗ずる列ベクトルであり、Syは同行列Sの成分のうち前記状態変数xyに乗ずる列ベクトルである。
(もっと読む)
スライディングモード制御系の設計方法及びその設計支援装置
【課題】スライディングモード制御系の簡易な設計方法を提供すること。
【解決手段】等価制御入力(u1)を算出する等価制御器(11)、切換関数(σ)の値に比例した制御入力(u2)を算出する比例到達制御器(13)、切換関数(σ)に基づいて決定され制御対象の状態に対して非線形な制御入力(u3)を算出する非線形制御器(14)、並びに、三つの制御入力(u1、u2、u3)を加算して制御入力(u)を算出する加算器(15)を備えたスライディングモード制御系(10)の設計方法は、制御対象を線形制御系で制御する場合の状態フィードバックゲイン(Fc)を算出するステップ、及び、状態フィードバックゲイン(Fc)によって導出される制御入力が制御入力(u1)と制御入力(u2)との合計に等しいものとして等価制御器(11)及び比例到達制御器(13)を設計する設計ステップ、で構成される。
(もっと読む)
除振システム、除振方法及びプログラム
【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
サーボ制御方法、サーボ制御装置
【課題】オープン制御から適応スライディングモード制御へと移行する際の制御性の悪化を回避する。
【解決手段】オープン制御から適応スライディングモード制御へと移行する際に、適応スライディングモードコントローラ51の制御入力を移行直前のオープンコントローラ52の制御入力に一致させるべく、適応スライディングモードコントローラ51の状態量を算定するようにした。
(もっと読む)
プラントの制御装置
【課題】 制御対象の動特性変化の大きい場合、外乱が大きい場合、あるいは制御対象が非線形特性を有する場合において十分なロバスト性及び安定性を有するスライディングモード制御を行うことができるプラントの制御装置を提供する。
【解決手段】 スライディングモード制御器101、減算器102、及び周波数整形制御器103により、制御対象100への制御入力となる最終操作量UFMを算出する。減算器102、周波数整形制御器103、及び制御対象100からなるブロックを拡大制御対象110とし、拡大制御対象110の伝達関数FX(s)が所望の目標伝達関数F(s)となるように、周波数整形制御器103の伝達関数H(s)が設定される。CS角度CSAがCS角度指令値CSACMDと一致するようにフィードバック制御が行われる。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
プラントの温度を制御する電子制御装置
【課題】温度推定モデルにおける非線形な関数(テーブルやマップ)を温度センサ出力に基づいて修正する。
【解決手段】電子制御装置は、プラントの温度推定値を算出するプラントモデルについて、プラントに関わる第1のパラメータとプラントモデルに関わる第2のパラメータとの相関モデルを用いて温度推定値を算出する。この装置は、さらに算出されたプラントの温度推定値に基づいてプラントの温度を制御する。また、相関モデルに対し、複数の第1のパラメータの範囲に対して定義された複数の関数(Wi)を定義し、この複数の関数の高さを調整する修正係数(Kli,Kci)を温度センサの出力と算出されたプラントの温度推定値に基づいて算出し、複数の関数(Wi)および修正係数(Kli、Kci)により前記相関モデルを修正する。
(もっと読む)
11 - 20 / 35
[ Back to top ]