
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,911 - 1,920 / 7,349
路面標示認識装置
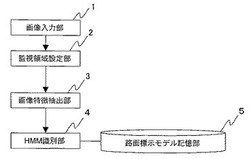
【課題】従来の路面標示認識装置は、カメラでの撮影画像全体を領域分割した後、2次元平面への投影などの変換処理を行うので、CPU負荷が大きく、また、検知ライン上の明るさの変化位置に基づき路面標示を認識する計算量抑制方法は、自車両前方に他車両が位置し、路面標示の一部を隠蔽した場合、路面標示を正しく認識できない。
【解決手段】画像入力手段で得られた自車両の走行路を含む所定領域を撮影した画像中の、部分領域を監視領域とし監視領域設定手段で設定し、監視領域から、画像特徴を画像特徴抽出手段で抽出し、この特徴抽出手段で得られた特徴と、路面標示モデル記憶手段に予め格納されている路面標示モデルとをHMMを用いてHMM識別手段で比較評価して路面標示の認識を行う。
(もっと読む)
運転者監視装置

【課題】人物が眼を閉じているか否かを正確に判定可能とする運転者監視装置を提供する。
【解決手段】車両の運転者に向けて発せられる光波の光強度を検出する光強度検出手段と、車両の運転者の顔画像を撮像する顔画像取得手段と、顔画像に基づいて運転者の瞼の開き具合を示す眼開度を算出する眼開度算出手段と、運転者の瞼の開閉状態を判定する閉眼状態判定手段と、運転者が居眠りしているか否かを閉眼状態判定手段による判定結果に基づいて判定する居眠り判定手段とを備え、閉眼状態判定手段は、運転者の眼が閉じているか否かを判定するための閉眼判定閾値を光強度の大きさに応じて補正し、運転者の眼が閉じているか否かを眼開度および閉眼判定閾値に基づいて判定する閉眼判定手段と、運転者の眼が閉じている可能性を示す閉眼確度を眼開度および光強度に基づいて算出する閉眼確度算出手段との、少なくとも何れか一方の手段を含む、運転者監視装置である。
(もっと読む)
車線認識装置、及び車線認識方法
【課題】走行車線の認識結果を取扱う制御系の信頼性を向上させる。
【解決手段】先ずレーンマーカの候補点が、明らかに誤検出であるか否かを判断し、候補点の誤検出が明らかであれば(ステップS104の判定が“Yes”)、道路モデルを初期化するリセット処理を行う(ステップS105)。一方、候補点の誤検出が不明であれば(ステップS104の判定が“No”)、候補点の検出結果に連続性があるか否かを判断し、候補点の検出結果に連続性がないと判断したら(ステップS106、S109、S110の何れかの判定が“Yes”)、一時的に外乱の影響を受けている可能性があるので、道路モデルの更新を中止する、つまり道路パラメータの今回値を削除し、前回値を保持するロスト処理を行う(ステップS107)。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】車両が逆走するおそれが有る場合に逆走を禁止する旨の案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置60は、車両の走行経路を取得する経路取得部61aと、経路取得部61aが取得した走行経路から車両が逸脱したか否かを判定する経路逸脱判定部61bと、車両の車速を検出する車速検出部61cと、経路逸脱判定部61bにより車両が走行経路から逸脱したと判定された場合、車速検出部61cが検出した車速の変化に基づき、車両の逆走を禁止する旨の案内を行うか否かを決定する案内制御部61dとを備える。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から順次複数の所定の経路パターンで仮想的に移動させて先端に設定された仮想移動点に置く仮想移動処理手段と、各仮想移動点を新たな基準点とする基準点更新処理手段と、各仮想移動点において、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段とを有する。車両が、移動可能条件が成立するまで仮想的に移動させられるので、車両を現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができる。
(もっと読む)
車両運転支援装置及び支援方法
【課題】移動体の挙動予測を効率的に行って接触の可能性を迅速に判断し、適切なタイミングで警告情報を提示できるようにする。
【解決手段】車両に搭載されたカーナビゲーションシステム10のナビゲーションECU11が、第1光ビーコン4から受信した運転支援情報に含まれる交差点構造情報に基づいて、サービス対象交差点における移動体検知エリアを複数のエリアに分割し、CAN経由で取得される車速情報に基づいて、分割した複数のエリアの優先順位を決定する。そして、優先順位の高いエリアから順に当該エリアに存在する歩行者や自転車の挙動を運転支援情報に含まれる移動体状態情報に基づいて予測し、その予測結果とCAN経由で取得される車両情報とに基づいて注意喚起の必要性を判断して、注意喚起の必要性ありと判断した場合に、ディスプレイ14での画面表示やスピーカ15からの音声出力により警告情報を提示する。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず、安全確認をしたと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点に進入する際にドライバが安全確認動作を行うべき範囲において、ドライバの視線の水平角を示す水平角信号をサンプリングし(S10〜S15)、このサンプリングした水平角信号からパワースペクトルを計算する(S16)。そして、計算されたパワースペクトルにおいて、安全確認に必要な前記水平角の変化の周波数範囲(0.2〜1.5Hz)におけるパワーの極大値の総和を計算し(S17)、この総和が所定値(1400)に達していない場合はドライバによる安全確認がなされてないと判定し、所定値(1400)以上である場合はドライバによる安全確認がなされたと判定する(S18)。
(もっと読む)
撮像システム
【課題】追跡対象の付近に他の対象が存在する場合でも、当該追跡対象だけに警告などの情報を音声で伝えることができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内および前記交差点周辺を移動する複数の対象を撮像する全体視撮像部と、予め定められた条件に基づいて、前記全体視撮像部の撮像データから追跡対象を特定する追跡対象特定部と、前記全体視撮像部よりも画像解像度が高い撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記追跡対象に対する指向性を持たせた音声情報を出力する音声情報出力部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
運転支援装置
【課題】死角となる領域に存在する障害物と車体との接触を確実に回避することが可能な運転支援装置を提供する。
【解決手段】運転支援装置1は、物体位置センサ10と死角領域設定部21障害物特定部24と障害物位置判定部25と報知部26とを備える。物体位置センサ10と障害物特定部24とは、車両の周囲の所定の範囲の障害物を検知する。死角領域設定部21は、所定の範囲のうち車両の運転席に着座した運転者にとって車両の死角となる領域を死角領域として設定する。障害物位置判定部25は、死角領域設定部21が設定した死角領域に障害物特定部が特定した障害物が含まれるか否かを判定する。
(もっと読む)
1,911 - 1,920 / 7,349
[ Back to top ]