
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,941 - 1,950 / 7,349
運転誘導装置
【課題】潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能な運転誘導装置を提供する。
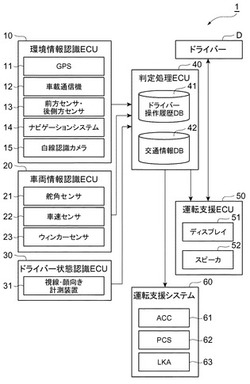
【解決手段】判定処理ECU40が、自車両V0の通過領域である移動領域TRと、自車両V0の周辺に潜在的に存在する移動体V1等について、移動体V1等の通過領域である移動領域TRを予測する。判定処理ECU40は、予測した自車両V0と移動体V1等との移動領域TRとの重複領域に基づいて、移動領域TRの重要度Iを算出するため、潜在的な危険に基づいて自車両V0が通過する領域における運転の難易度を算出できる。判定処理ECU40は、算出した重要度IとドライバーDの運転技量Tとに応じて自車両V0が将来走行すべき経路を設定し、運転支援ECU50が設定した経路にドライバーDを誘導するため、潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能となる。
(もっと読む)
車両用運転支援装置

【課題】路側通信機の情報を乗員へ報知可能な車両用運転支援装置において、自車両と移動体の接近度と情報の劣化度とを乗員に対して報知でき、情報の劣化度に応じた接近度を報知可能な車両用運転支援装置を提供する。
【解決手段】運転支援装置は、路上の移動体を検出可能な路側ユニットから自車両前方の移動体に関する情報を受信し、この移動体の情報を乗員へ報知するように構成されている。存在領域算出部16は、移動体を検出した場合、移動体が交差点に到達するまでの期間推定するように構成され、移動体を撮像した時点からの経過時間に起因した情報の曖昧さを移動体の存在領域の算出に反映している。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法
【課題】道路上の指標が認識できない場合であっても、車両が分岐路に進入したことを判断できる分岐路進入判断装置等を提供する。
【解決手段】分岐路に進入する位置P1にて、(1)分岐情報を取得し、(2)車線幅平均値LaneW_AVEを算出し、(3)右側白線種別と左側白線種別を認識しておく。位置P2まで進行すると、(4)車線幅の広がりを検出し、位置P3にて、(5)左側白線は実線検出を継続するが右側白線はロスト状態となる。その後、位置P5まで進入すると、(6)右側白線のロスト状態から復帰し、これにより、分岐路に進入したことを判定できる。
(もっと読む)
通信方法およびそれを利用した基地局装置
【課題】パケット信号の衝突確率の増加を抑制しながら、車車間通信と路車間通信との間における相互の影響を低減する技術を提供する。
【解決手段】フレーム規定部34は、複数のサブフレームにて形成されたフレームを規定する。各サブフレームが、複数のスロットにて形成された第1期間と、所定の長さを有した第2期間とを含むように規定され、かつ第1期間の複数のスロットが、第1種スロットと、第2種スロットと、複数の第3種スロットに分類されている。検出部32は、複数の第3種スロットの中から、通信に使用可能な第3種スロットを検出する。生成部36は、検出した第3種スロットに関する情報を、複数のサブフレームのうちのいずれかにおける第1種スロットにて報知する。生成部36は、情報を報知した第1種スロットを含んだサブフレームのうち、第2種スロットにおいて、端末装置へのデータを送信する。
(もっと読む)
運転支援システム、運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの思い込みによるリスクを低減できる運転支援システムを提供する。
【解決手段】車両の運転を支援する運転支援システムにおいて、自車に搭載されている自車周辺の映像を撮像する映像撮像装置と、前記自車周辺にある障害物までの距離を測定する障害物距離計測装置と、前記撮像した自車周辺の映像と記憶している自車を模擬した画像とを合成するモニタ映像生成部と、前記計測された距離に基づいて、ドライバの危険運転度を判定する危険運転度判定部と、前記危険運転度判定部の判定結果に基づいて、自車を模擬した画像の大きさを変更する画像変更部とを備えた運転支援装置と、前記画像変更部で変更された画像を表示可能な画像表示装置とを備える。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法
【課題】自車両が分岐路に進入したことを確実に検出することができる分岐路進入判断装置等を提供する。
【解決手段】自車両の前方方向に分岐路が存在することを検出した場合に、単眼カメラ3により撮像した撮像画像に基づいて、カメラコントローラ4により認識された右側白線認識結果と左側白線認識結果との組み合わせから、コントローラ10が、自車両が分岐路に進入したと判断する。自車両が分岐路に進入した場合に、ナビゲーション装置2の位置補正部2dにより位置を補正できる。
(もっと読む)
路車間通信システムおよび路側通信装置
【課題】路車間通信システムにおいて、危険度の高い車両と路側通信装置の間での通信成立の確率を向上させるための技術を提供する。
【解決手段】通信装置を備える車両と、前記車両と通信を行って情報を送受信する路側通信装置とを有する路車間通信システムであって、前記車両は、少なくとも位置および速さを含む自車の走行状態を取得して前記路側通信装置に送信し、前記路側通信装置は、前記車両から受信した走行状態に基づいて車両ごとの危険度を判定し、当該危険度が高い車両に対して多くの通信リソースを割当てる割当て制御部を備えることを特徴とする路車間通信システムを用いる。
(もっと読む)
車両周辺認知支援装置
【課題】
ホーンを普段ほとんど使用しない車両100の運転者がいざというときに即座に危険回避行動(ホーンを鳴らす)が取れる車両周辺認知支援装置を提供すること。
【解決手段】
車両100の周辺に存在する物体の物体情報をフロントカメラ11が検出すると、電子制御ユニット1は当該物体情報に基づいて、ステアリングホイール21に備えられたホーンパッド61に設置された発光部71を発光させるため、車両100の運転者はホーンパッド61の位置を容易に認識することができる。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】自車両Aの位置Aを計測する自車両位置計測手段と、他車両Bにより発生する音を検出する音センサ11と、音センサ11の検出信号に基づき、自車両Aに対する他車両Bの方位を演算する他車両方位演算手段と、道路上の特定地点を表すノード及び特定地点間の接続を表す道路リンク301,302を含む地図データ12と、自車両Aの位置A、他車両の方位及び地図データに基づいて、道路リンク302上における他車両Bの位置Bを演算する他車両位置演算手段を有する。
(もっと読む)
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 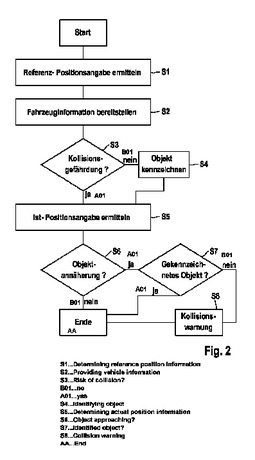 (もっと読む)
(もっと読む)
1,941 - 1,950 / 7,349
[ Back to top ]