
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,971 - 1,980 / 7,349
運転支援システム
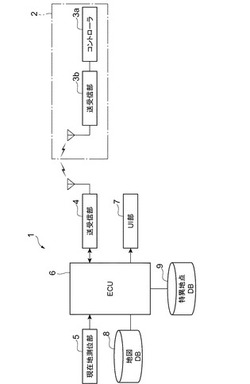
【課題】支援対象地点の手前の道路形状にかかわらず、支援対象地点に対して適切な運転支援を行うことができる運転支援システムを提供する。
【解決手段】 運転支援システム1は、路側機2と送受信を行う送受信部4と、自車両の現在位置を検出する現在地測位部5と、ECU6と、ドライバに対して音声や映像によりサービス対象地点の状態案内を行うためのUI部7とを備えている。ECU6は、送受信部4が路側機2からのサービス対象地点に関する情報を受信すると、特異地点DB9に格納された情報からサービス対象地点の手前に現在位置自信度低下領域が存在するかどうかを判断し、サービス対象地点の手前に現在位置自信度低下領域が存在するときは、自車両が現在位置自信度低下領域に進入する前または自車両が現在位置自信度低下領域を通過した後にサービス対象地点の状態案内を行うようにUI部7を制御する。
(もっと読む)
車両制御装置

【課題】 車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供する。
【解決手段】 車輪の回転速度を検出する回転検出装置1と、その出力信号から車両移動量を検出する車両移動量検出手段16とを設ける。車両と対象物との間の離間距離を非接触で計測するレーザレーダ等の離間距離測定手段14を設ける。離間距離測定手段14で検出された離間距離と車両移動量検出手段16で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段17を設ける。
(もっと読む)
車両周辺のモニタ方法
本発明は、車両(F)の周辺(U)のモニタ方法に関し、検知範囲が少なくとも部分的に重なり合って重複部分を形成する少なくとも1つの第1の画像取込み装置(1)と第2の画像取込み装置(2)とを用いて、周辺(U)及びその周辺にある物体(O1、O2)が検知され、この画像取込み装置(1、2)によって検知された個々の画像から、画像処理装置を使って、車両(F)及びその周辺(U)を鳥瞰図で示した全体画像(G)が生成される。この場合、検出された物体(O1、O2)の位置に応じて、全体画像(G)の中で、第1の個別画像範囲(EB1)と第2の個別画像範囲(EB2)との間において、起点から全体画像(G)の画像周縁まで伸びている少なくとも1つの境界線(L1〜L3)が、物体(O1、O2)から逸れて通るように設けられる。 (もっと読む)
走行支援装置及び走行支援方法
【課題】狭部を通過するための最適な経路を運転者に認識させることができるようにする。
【解決手段】狭部通過のため、自車両が現在位置から現在の舵角を維持して進行したときの第1軌跡と、狭部位置の手前で自車両を停車させて舵角を変更する舵角変更ポイントと、自車両が前記舵角変更ポイントから当該舵角変更ポイントで変更した後の舵角を維持して進行したときの第2軌跡とを算出して、第1軌跡と舵角変更ポイントと第2軌跡とからなる狭部通過の経路情報を、自車両周囲の俯瞰画像などに重畳して支援画像としてモニタに表示する。
(もっと読む)
シートベルト制御装置
【課題】運転者の脳波に応じてシートベルトのベルト張力を制御し、事故を未然に防ぐと共に運転者を適切に保護するシートベルト制御装置を提供する。
【解決手段】ベルト13を装着した運転者11から検出された脳波が下降又は上昇しているか否かを判定する。周波数が下降している場合、正逆に回転し、ベルト13を巻き取るベルトリールを駆動するモータの回転制御を行って、ベルトリールを正転又は逆転させて、ベルト13の張力を繰り返し高低させる。周波数が上昇している場合、ベルト13の張力を高くする。
(もっと読む)
外界認識装置
【課題】処理負荷の低減と検出精度の向上を図ることができる外界認識装置を提供する。
【解決手段】車両10に設置された複数のカメラ201〜203で撮像される車両周囲の画像を利用して認識対象Pを認識する外界認識装置は、入力されるパラメータに応じて、前記各画像の座標変換と合成を行い、合成画像を作成する合成変換部104と、合成変換部104で作成された合成画像に対して画像処理を行い、認識対象を認識する認識部と105と、認識部105によって認識された認識結果に基づいてパラメータを生成するパラメータ生成部108を有する。
(もっと読む)
運転支援装置
【課題】ヒヤリ・ハット事象の発生地点(ヒヤリ・ハット地点)の判別性能を向上し、飛び出しや出会い頭の衝突の可能性が高い有用なヒヤリ・ハット地点を判別して有用な地点のみの記録や表示を可能にする。
【解決手段】制御処理部41により、自車1の衝突回避の挙動変化を検出し、自車1の現在の走行環境が衝突予測の困難な状況か否かを判断し、この判断に基づき、自車1の現在の走行環境が衝突予測の困難な状況であれば前記挙動変化が真のヒヤリ・ハット事象によるものであるとして、前記挙動変化が真のヒヤリ・ハット事象によるものか否かを判別することにより、衝突予測の困難な状況の地点であって、車両や歩行者の飛び出しや出会い頭の衝突が発生しそうなな真のヒヤリ・ハット地点のみを判別して記録や表示を可能にする。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
道路形状認識装置
【課題】車両の進行方向前方に存在する道路の道路形状を正確に認識することができる道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、車両の進行方向前側を撮像した画像に基づいて道路の道路領域を検出し、その道路領域に基づいて道路の形状を推定する。これにより、道路形状を近傍から遠方まで正確に認識することができる。
(もっと読む)
移動体検知装置および移動体検知方法
【課題】光量が十分でない環境において非発光の移動体を検知する装置および方法を提供する。
【解決手段】移動体検知装置は、画像取得部、差分画像生成部、算出部、および警告出力部を備える。画像取得部は、カメラにより撮影された1または複数の画像から生成される第1の画像、および前記カメラにより前記1または複数の画像よりも後に撮影された第2の画像、を取得する。差分画像生成部は、前記第1の画像の各画素値から前記第2の画像の対応する各画素値をそれぞれ引算して差分画像を生成する。算出部は、前記差分画像において所定の閾値レベルを越える画素値を有する画素の数に基づいて隠蔽パラメータを算出する。そして、警告出力部は、前記隠蔽パラメータが所定の条件を満たすときに警告を出力する。
(もっと読む)
1,971 - 1,980 / 7,349
[ Back to top ]