
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,001 - 2,010 / 7,349
車両の走行安全装置
【課題】交差点を適切に検出して交差点での自車両の所望の走行安全性を確保する。
【解決手段】車両の走行安全装置10は、自車両の前方部に設けられて自車両の左右方向の外界を撮像して得た画像を出力する第1カメラ21および第2カメラ22と、各カメラ21,22から出力された画像データに基づいて、路面上端の線分を平面境界線として抽出する境界線抽出部34と、路面および路面上の構造物が存在しない空の領域を抽出し、空の領域から最も平面境界線に近接する近接点を抽出する近接点抽出部35と、平面境界線と近接点との距離を算出する距離算出部36と、平面境界線と近接点との距離が所定距離以下である場合に、自車両が交差点に直面する地点に位置していると判定する交差点判定部37とを備える。
(もっと読む)
駐車支援装置

【課題】駐車させる場合に、車両と駐車スペースの枠との平行の程度を確認しやすくする駐車支援装置を提供する。
【解決手段】駐車支援装置は、車両の周辺の画像を撮像し、撮像された画像から、車両の進入方向に伸長する駐車スペースの枠線を認識し、該認識された枠線の、該駐車スペースの入口とは反対の方向に向かう延長線上に、仮想の枠線を前記画像上に重畳し、該仮想の枠線が重畳された画像を表示する。仮想の枠線により、駐車スペースの枠線が、駐車スペースの入口とは反対方向に向かって延長されたように表示されるので、車両が該駐車スペースに進入するにつれて表示される枠線が短くなるのを回避することができる。したがって、駐車スペースに進入した後も、運転者は、車両が駐車スペースの枠線に平行であるかどうかを、容易に確認することができる。
(もっと読む)
立体物検出装置及び立体物検出方法
【課題】車両の進行方向に応じて、立体物又は白線等の走路境界を検出するための処理画像の最適化を図る立体物検出装置を提供する。
【解決手段】車両1の前方の画像を撮像する撮像手段と、車両1の走行状態を検出する走行状態検出手段と、画像より立体物200を検出する立体物検出手段と、立体物200に衝突するまでの衝突時間を算出する衝突時間算出手段と、衝突時間、車両のステアリング108の操舵方向に応じて、明るさの基準となる基準領域を設定し、基準領域の明るさに応じて、撮像手段の露光量を制御する制御手段を有する。
(もっと読む)
居眠り判定装置及びプログラム並びに警報出力装置及びプログラム
【課題】短時間で正確に居眠りを判定する。
【解決手段】居眠り判定装置は、被験者の眼球位置を検出する眼球運動検出部21と、検出された被験者の眼球位置に基づいて、緩徐眼球運動を検出する緩徐眼球運動算出部26と、緩徐眼球運動が検出された場合に、前記被験者は居眠り状態であると判定する居眠り判定部34と、を備えている。
(もっと読む)
車線区画線検出装置、車線区画線検出方法、及び車線区画線検出プログラム
【課題】ノイズが存在する場合でも、正確に車線区画線を検出することのできる、車線区画線検出装置、車線区画線検出方法、及び車線区画線検出プログラムを提供する。
【解決手段】走行路を走行する走行体から前記走行路を撮像して得られた原画像を取得する、原画像取得手段と、前記原画像に基づいて、前記走行路に含まれる車線区画線の前記走行体からの相対位置を検出する車線区画線位置検出手段と、時刻t0における原画像である第1画像の部分画像と、前記時刻t0よりも過去における前記原画像である過去画像の前記部分画像とに基づいて、車線区画線位置検出手段における検出結果を検定する、検定手段とを具備する。
(もっと読む)
物体検出装置
【課題】適正な走行支援をするために必要な自車両周辺の物体の情報を取得することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、車両状態検出部2、環境状況取得部3、道路情報取得部4、検出制御部6及び検出部7を含んで構成されている。自車両状態予測部61は、自車両81の目標状態を取得する。検出部7は、物体を検出する。パラメータ設定部63は、目標状態に応じて検出部7における物体の検出特性を切替える。
(もっと読む)
運転支援装置
【課題】駐停車の際のドアの開閉が分かりやすく、搭乗者の利便性に優れた運転支援装置を得る。
【解決手段】車両のデータを記録した車両DB3と、データ解析部5と、表示生成部6とを備える。データ解析部5は、車両の周辺の障害物を検出する障害物検出部4からの障害物データ及び車両DB3からの車両データを用いて、車両並びにこの車両の全開時のドア及びこのドアの開閉の軌跡と、障害物との距離及び位置を算出する。表示生成部6は、データ解析部5からのデータと車両データと障害物データとを用いて、少なくとも1つの方向から見た、ドアを開けた車両及びこのドアの開閉の軌跡並びに障害物の画像を生成し、表示部8に表示するものである。
(もっと読む)
制御対象物抽出装置および車両制御装置
【課題】制御対象物抽出装置において、マンホール等、先行車両の陰に入りうる物体であって制御対象物とすべきでない物体を確実に制御対象物から除外することができる技術を提供する。
【解決手段】車両制御システムにおいては、不要物体判定処理にて、監視対象領域に存在する1または複数の物体のうちから自車両に対して先行して走行する先行車両を抽出し、監視対象領域のうちの自車両と先行車両との間の領域である車両間領域に位置する1または複数の物体である対象物候補を抽出する(S420,S440)。さらに、各対象物候補のうちの追跡が開始されてからの時間を表す追跡時間が予め設定された追跡基準時間以上である対象物候補を制御対象物として抽出するよう設定し、追跡時間が追跡基準時間未満である対象物候補を制御対象物として抽出しないよう設定する(S510,S530,S570,S590)。
(もっと読む)
駐車支援装置
【課題】駐車スペースに車両を1回の後退操作で駐車可能な切り返し位置であることを認識できる駐車支援装置を提供する。
【解決手段】車両の後方の画像を撮像し、車両が前進している間、車両を直進後退させた場合に該車両の駐車スペース側の部分が辿る第1の軌跡と、該直進後退するときとは異なる所定のハンドルの舵角で旋回後退させた場合に該車両の駐車スペース側の部分が辿る第2の軌跡とを、該車両の該駐車スペース側の後輪の後端部から伸長するように、後方の画像に重畳して表示する。この表示により、車両の乗員は、駐車スペースの入口の両端部のうち前記切り返し位置に近い方の端部が第1および第2の軌跡の間に入ったときの該車両の位置が、該駐車スペースに該車両を1回の後退操作で駐車可能な前記切り返し位置であることを認識することができる。
(もっと読む)
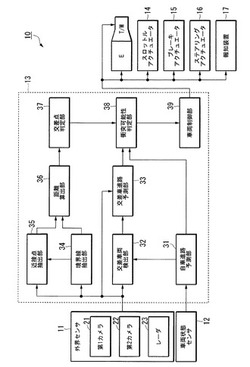
車両の走行安全装置
【課題】自車両が進行方向前方の先行車両に衝突する可能性を低減する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の走行路に交差する交差路を走行する交差車両を検出する交差車両検出部32と、交差車両の進路を予測する交差車進路予測部33と、自車両から所定距離以内の進行方向前方に存在する先行車両を検出する先行車両検出部35と、自車両の進路と交差車両の進路とに基づいて自車両と交差車両との衝突可能性の有無を判定し、先行車両の位置と交差車両の進路とに基づいて交差車両と先行車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両の走行路と交差路との交差点において、自車両と交差車両との衝突可能性が有ると判定された場合、又は、交差車両と先行車両との衝突可能性が有ると判定された場合に、所定の警報または前記回避制御を実行する車両制御部41とを備える。
(もっと読む)
2,001 - 2,010 / 7,349
[ Back to top ]