
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,981 - 1,990 / 7,349
信号機通過支援システムおよび信号機通過支援システム用の車載装置
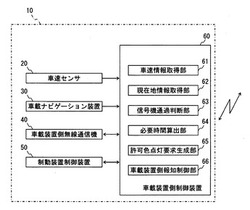
【課題】燃料消費量の低減を図ることができるとともに、運転者に車速調整の煩わしさを感じさせることを抑制できる信号機通過支援システム、および、信号機通過支援システム用の車載装置を提供する。
【解決手段】車載装置側制御装置60は、車速V0を維持する場合に車両Cが信号機Sの所在地に到達するまでに必要となる第1必要時間Tc1を経過した時に、信号機Sが赤色信号灯11cを点灯していると判断すると、第1必要時間Tc1経過時において青色信号灯11aが点灯しているよう要求する第1許可色点灯要求信号RQ1を生成し、第1許可色点灯要求信号RQ1を信号機Sに送信する。信号機Sは、この第1許可色点灯要求信号RQ1を受信すると、第1必要時間Tc1経過時において青色信号灯11aが点灯するように信号灯11の制御を行う。
(もっと読む)
運転者注意負荷の監視と管理とを行なうシステムおよび方法

【課題】眠気を催す状況、注意をそらさせる状況および/または高作業負荷状況において運転者を補助することにより、安全を高める運転者の生理的行動監視システムおよび方法を提供する。
【解決手段】運転者の生理学的変数を測定する段階と、少なくとも前記測定された生理学的変数に基づいて運転者の行動パラメータを評価する段階と、前記評価された運転者の行動パラメータを運転者に通知する段階とを含む、運転者の生理的行動を監視するシステムおよび方法。生理学的変数を測定する段階は、運転者の目の動きを測定する段階と、運転者の凝視方向を測定する段階と、運転者の閉瞼量を測定する段階と、運転者の瞬目動作を測定する段階と、運転者の頭部の動きを測定する段階と、運転者の頭部位置を測定する段階と、運転者の頭部の配向を測定する段階と、運転者の可動顔面特徴を測定する段階と、運転者の顔面温度像を測定する段階とを含みうる。
(もっと読む)
車両逆走防止システム
【課題】本発明は、サービスまたはパーキングエリアからの退出時に、入口路を走行していることを、自動車専用道路に進入する前に運転者に警告し、自動車専用道路を逆走することを防止する車両逆走防止システムを実現することを目的としている。
【解決手段】このため、地図データ記憶手段と、自車位置情報取得手段と、地図データ記憶手段の地図データと自車位置情報取得手段の自車位置から、自車が自動車専用道路からサービスまたはパーキングエリアへの進入を検出する進入検出手段と、進入検出手段の進入検出時に、自動車専用道路とサービスまたはパーキングエリアとの境界領域を入口路として記憶する入口路記憶手段と、地図データと自車位置から自車の入口路の走行を検出する入口路走行検出手段と、入口路の走行時に警告する警告手段を備える。
(もっと読む)
路車間狭域無線通信システム、路車間狭域無線通信システムのセンター、路側狭域無線通信装置、および車載狭域無線通信装置
【課題】道路の交通状況の変化に対応した配信情報の消去あるいは更新を路側狭域無線通信装置が行い、車両の運行状態の変化に対応した配信情報の消去を車載狭域無線通信装置が行う路車間狭域無線通信システムを得る。
【解決手段】センター90は、道路の交通状況を検出するセンサ91と、道路の交通状況に対応した複数種類の配信情報を作成し、配信情報に危険度に応じて優先順位を設ける配信情報作成装置93と、配信情報を路側狭域無線通信装置400に配信する通信装置92とを備え、路側狭域無線通信装置400は、センター90から受信した配信情報を優先順位に基づいて送信可否を判断する制御装置80と、送信可と判断された配信情報を車両へ配信する狭域無線通信装置10とを備え、車載狭域無線通信装置100は、路側狭域無線通信装置400から配信情報を受信する狭域無線通信装置10と、配信情報を再生する情報入出力装置40とを備えた。
(もっと読む)
車線認識装置、及び車線認識方法
【課題】車線認識による道路曲率の算出において、ノイズの影響を抑制しつつ、応答性を向上させる。
【解決手段】画像から道路曲率ρを算出し(ステップS1)、旋回挙動から旋回曲率κを算出する(ステップS2)。そして、道路曲率ρと旋回曲率κとの差分が閾値th1よりも大きく、且つ旋回曲率κに対して道路曲率ρが接近傾向にあれば(ステップS4又はS9の判定が“Yes”)、道路曲率ρに対するノイズの影響度合が小さく、単なる応答遅れであると判断し、道路曲率ρに対する平滑度合を弱める(ステップS5、S10)。一方、旋回曲率κに対して道路曲率ρが離間傾向にあれば(ステップS4又はS9の判定が“No”)、道路曲率ρに対するノイズの影響度合が大きく、単なる応答遅れではないと判断し、道路曲率ρに対する平滑度合を強める(ステップS6、S11)。
(もっと読む)
消失点推定装置およびプログラム
【課題】撮像画像から単一の直線しか検出されない場合であっても、計算量を増大させることなく、安定して消失点の位置を推定可能な消失点推定装置を提供する。
【解決手段】直進判定部48にて自車両が直進していると判定されると、直線検出部42は、画像処理部41の特徴点抽出処理によって撮像画像から抽出された特徴点から画像中の直線を検出し、その直線を表すパラメータ(直線情報)を算出する。交点算出部44は、現在の推定サイクルで直線検出部42にて算出された直線情報から特定される今回直線同士の交点の位置、及び、直線情報記憶部43に記憶されている前回の推定サイクルで算出された直線情報から特定される過去直線と今回直線との交点の位置を算出する。計数部45は、交点算出部44にて算出された交点の位置の出現頻度を、X軸方向,Y軸方向のそれぞれについて計数し、計数結果である頻度分布から画像中の消失点の位置を推定する。
(もっと読む)
交通監視ポイント検出装置及びプログラム
【課題】 周囲に存在する交通監視ポイントを検出し、それに関する適切・有益な情報を報知することで、安全運転に寄与することのできる交通監視ポイント検出装置を提供すること
【解決手段】 自車の位置を検出するGPS受信機と、交通監視ポイントの位置情報を記憶するデータベースと、GPS受信機で検出された現在位置情報と、データベースに格納された交通監視ポイントの位置情報とに基づき、警報対象の交通監視ポイントを抽出し、抽出された交通監視ポイントについての警報を表示部のメイン表示領域R1に描画出力する制御部と、を備える。交通監視ポイントが非常設の場合、頻度情報を関連づけて記憶し、制御部は、抽出された交通監視ポイントに関連づけられた頻度情報が基準値に満たない場合、正規の警報をしない制御を行う。
(もっと読む)
居眠り防止装置
【課題】 簡素な構成で覚醒状態を感知することができ、且つ、車両運転者が煩わしさを感じる虞が少ない居眠り防止装置を提供する。
【解決手段】 居眠り防止装置1は、車両運転者に警告音を発する警告部4と、車両運転者が警告部4からの警告に応えるための操作部3と、警告部4にて警告を出力させる制御部2と、を備える。制御部2は、警告部4が車両運転者に対して警告を出力してから車両運転者が操作部3を操作するまでの時間T2に応じて、次回の警告を出力するまでの間隔時間T1を変更する。制御部2は、定期的に前記警告を発生させる手動モードと、前記車両運転者による前記操作部3の操作に応じて作動する自動モードと、の切替えが可能である。
(もっと読む)
走行支援装置
【課題】本発明は、無駄な加減速を抑制する目標速度を設定することができる走行支援装置を提供することを課題とする。
【解決手段】自車両の目標速度を設定する走行支援装置1であって、自車両周辺の他車両の速度を取得する他車両速度取得手段11,21と、他車両速度取得手段11,21で取得した他車両の速度に基づいて目標速度を算出する目標速度算出手段51を備え、目標速度算出手段51は、他車両速度取得手段11,21で自車両前方の複数の他車両の速度を取得できた場合、当該複数の他車両の中で速度の低い他車両ほど目標速度算出に寄与する重みを大きくすることを特徴とする。
(もっと読む)
右左折支援装置及び右左折支援方法
【課題】信頼性の高い情報提示を行えるようにする。
【解決手段】対向直進車又は並走直進車の検出結果を用いて生成した右左折支援情報を路上の送信機から送信し、右左折車が路上の送信機から送信された右左折支援情報を受信して、この右左折支援情報と右左折車の走行状態とに基づいて情報提示の必要性を判断し、情報提示の必要性がある場合に対向直進車又は並走直進車が接近していることを示す接近情報を提示する。
(もっと読む)
1,981 - 1,990 / 7,349
[ Back to top ]