
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,081 - 2,090 / 7,349
衝突安全システム
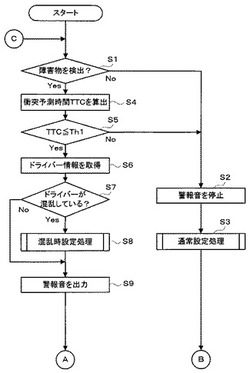
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
3Dワーピング手法と固有対象物運動(POM)の検出の組み合わせに基づく対象物の動き検出システム

【課題】車両の運転者支援システムにおいて、シーンにおける動的な対象物を検出するための方法を提供する。
【解決手段】車両のセンサ(内部センサ、3Dセンサ、カメラ)からの信号の運転者支援システムへの供給と、該センサ信号に基づき、3D世界位置を用いた周辺モデルの生成と、3Dワーピングに基づくアプローチおよびオプティカルフローに基づくアプローチの組み合わせを含む。新規な点は、a)3Dワーピング手法の計算結果に基づく、オプティカルフロー手法に基づく探索空間の制限、b)a)に加え、探索方向、大きさ等の観点で、オプティカルフローのアプローチの最適なパラメータ化、c)一方の手法の計算結果に基づく他方の手法の検出結果の改善および検証(両方が、並列に実行される場合)、である。さらに、たとえば衝突回避または経路計画システムにおいて使用するため、検出された動的な対象物及びそれらの計測された運動パラメータを記憶する。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
交差点警告装置
【課題】自車両が交差点から起動距離内に入ったときに警告を行うためのアプリケーションを実行する交差点警告装置において、車両の混雑度に応じて起動距離を適切に制御する。
【解決手段】他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、自車両の周囲の車両7、31、32の混雑度が高いほど、起動距離を長くし、混雑度が低いほど、起動距離を短くする。
(もっと読む)
運転支援装置および運転支援システム
【課題】より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することを可能にする。
【解決手段】道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している制限速度データベース27と、車両3の走行中の道路の道路条件情報を取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得て、当該制限速度の情報をもとに当該走行中の道路の制限速度を推定する制御装置26と、を備える。
(もっと読む)
標識認識装置
【課題】認識した道路標識の有効範囲を正しく判定して、運転者への正確な道路標識の提示を可能とする標識認識装置を提供する。
【解決手段】標識及び補助標識が示す有効道路区間数、距離、有効時間帯、車両状態の条件等の有効範囲条件を予め格納している標識有効範囲データ記録部7と、車両前方を撮像した道路画像を用いて、標識と補助標識を認識する標識認識部2と、車両の現在位置、車種、状態等を示す車両情報を取得する車両情報取得部4と、車両周辺の地図情報を取得する地図情報取得部3と、標識有効範囲データ記録部7の有効範囲条件、車両情報及び地図情報を用いて、当該車両が、標識認識部2で認識した標識と補助標識で指定された有効範囲にいるか否かを判定する標識有効範囲判定部5を備える。
(もっと読む)
運転支援装置
【課題】よりドライバーに違和感を与えずに運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】信号機の点灯状態に関する信号機情報を取得する通信装置104と、通信装置104が取得した信号機情報に基づいた最初のサービスを実行可能であり、最初のサービスの実行後に、信号機情報に基づいた後続のサービスを実行可能なインフラ協調ECU110とを備えた運転支援装置100において、インフラ協調ECU110は、第最初のサービス及び後続のサービスの内のいずれか一方を実行しないときは、もう一方のサービスも実行しないため、一部の種類の情報提供しかなされずに、期待していた他の種類の情報提供が行われないといったドライバーに違和感を与える事態を防止できる。
(もっと読む)
走行車線検出装置
【課題】後視カメラの画像により現在の走行車線を検出する装置では、車線変更しても後視カメラの画像にそれが表れるのにタイムラグがあり、車線変更の検出遅れが生じるので、後視カメラの画像を利用しても検出遅れの生じない「車線変更検出装置」を得る。
【解決手段】後視カメラの撮影画像により走行車線を検出している時、車線境界線の傾斜角を測定し、車線境界線が所定以上傾斜したことを測定し検出した時、測定した傾斜角と、車速と、測定の開始時からの経過時間とにより、車両が横方向に移動した距離を演算し、この横方向移動量が所定距離以上の時には、後視カメラで車線の移動を検出しなくても、車両が車線を変更したと判断し、走行車線の表示を変更する。このとき予めデータベースから右折レーンにより車線が増加する等のデータを入力しておくと、そのタイミングで前記横移動が発生すると、走行車線が移動したものとしてより早く先読みできる。
(もっと読む)
運転支援装置、及びプログラム
【課題】簡易な構成で、ドライバの運転を安全な運転及び省燃費な運転に導く。
【解決手段】自車両1の速度を検出する車速センサ16と、周辺車両90と自車両1との間の車間距離D[m]を検出する車間距離センサ14と、予め定められた車間時間32aに対応する自車両1のドライバの心理状態が登録されたテーブル32及び予め定められた車間時間30aに対応する周辺車両90のドライバの心理状態が登録されたテーブル30を記憶したHDD18とを含んで構成し、検出された速度V[m/s]及び検出された車間距離D[m]に基づいて、車間時間T[s]を演算し(ステップ108)、演算された車間時間T[s]及びHDD18の記憶内容に基づいて、演算された車間時間T[s]に対応する自車両1のドライバの心理状態及び周辺車両90のドライバの心理状態を自車両1のドライバに報知するように制御する(ステップ110、112、114)。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】超音波センサ等を用いず画像認識処理だけで、車両周囲に広がる壁を障害物として検出できる「障害物検出装置および障害物検出方法」を提供する。
【解決手段】4方向の撮影領域の車両周囲画像について障害物検出部25により障害物の検出処理を行った結果、ある撮影領域の車両周囲画像から障害物が検出されなかった場合であっても、その撮影領域に隣接する撮影領域の車両周囲画像について、隣接する撮影領域どうしの重複領域において障害物が検出されていると重複領域判定部26により判定されたときには、障害物が検出されなかった車両周囲画像の撮影領域に障害物が存在するとみなすことにより、ある撮影領域の車両周囲画像に写っている壁を障害物として検出できない場合でも、他の車両周囲画像の重複領域での障害物の検出結果を補助的に用いて、壁を障害物として検出できるようにする。
(もっと読む)
2,081 - 2,090 / 7,349
[ Back to top ]