
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,121 - 2,130 / 7,349
検出装置及び相対認識システム
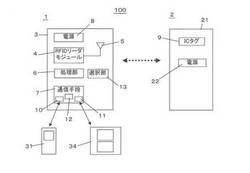
【課題】 歩行者が車両の接近を認識できるようにすること。
【解決手段】
自動車などの車両には車載器2が配置され、この車載器2にはICタグ9が設けられている。検出装置1は、歩行者が携帯しており、この検出装置1にはRFIDリーダモジュール4が内蔵されている。このRFIDリーダモジュール4によりICタグ9の存在が認識された場合、処理部6は車両が歩行者に接近しているものと判断し、通信部7により携帯電話等に報知命令の信号を送信する。携帯電話等では、スピーカーやバイブレータによりユーザに車両の接近を知らせる。これにより、歩行者と車両との接触事故が防止される。また、車載器2にはICタグを用いるので、導入が安価であり、普及させやすい。
(もっと読む)
車載装置及び中継装置

【課題】 交差点のように多数の車両が往来する場所での車両同士の衝突事故を防止する衝突防止システムを得る。
【解決手段】 車道脇に設置され、アンテナと送受信部と処理部と記憶エリアと道路構造情報が格納された書換え可能の道路構造情報データベースとを備えた中継装置と、GPS衛星のGPS信号から基準局が得た疑似距離データなどのGPS観測データを複数の基準局から受信し、受信したGPS観測データに基づいて補正位置情報を演算し、補正位置情報を送信する補正位置情報センタと、車両に搭載され、アンテナ部と送受信・計算部と警告判定処理部を備えた車載装置とからなる衝突防止システムであり、交差点周辺の道路構造情報と高精度な車両位置を示す車両測位データと車両走行情報から衝突事故の危険判定を行うようにした。
(もっと読む)
車線境界線種別推定装置及び車線境界線種別推定方法
【課題】処理負荷の少ない車線境界線種別推定装置及び車線境界線種別推定方法を提供する。
【解決手段】車載カメラ10で車両周辺の連続画像を取得し、特性抽出用DSP22において、車載カメラ10で取得した連続画像の各画像からエッジ点を検出する。エッジ点の検出は、各画像からキャニー法や微分エッジ検出法などの手法により行う。検出したエッジ点をハフ変換し、道路上の車線境界線を示す特性値としてハフ変換における投票数を算出する。そして、種別推定用DSP24において、特性抽出用DSP22でハフ変換により特性値として算出された投票数の時間的増減パターンに基づいて、投票数が変化しなければ直線、投票数が一定の比率で増加した後に同じ比率で減少するというパターンが繰り返されれば、破線であるというように車線境界線の種別を推定する。
(もっと読む)
現在位置特定装置とその現在位置特定方法
【課題】 従来、狭角Y字分岐路等の分岐において自車位置を特定する精度が低下してしまう問題を解決するために、カメラを用いて車線を検知するナビゲーション装置がある。しかし、車線変更可能な区間が検知範囲より長い道路を走行している場合、検知範囲に含まれない区間において車線変更がなされると、その車線変更を検知できず、走行している車線が正常に判定されないことがある。特に、地物の状態は一定でないため、車線変更可能な範囲は、個別の分岐点により大きく異なる。本発明の目的は、現在位置特定装置において、分岐点付近における自車位置の特定精度をより向上させる技術を提供することにある。
【解決手段】
本発明の現在位置特定装置は、走行している道路の状態に応じて検知範囲を特定して車線変更を検知し、検知した車線変更の情報を利用して現在地を特定する。
(もっと読む)
走行支援装置
【課題】 ナビゲーション装置で得られた情報から判定された道路種別に対して、その道路種別に応じた適正な走行支援を行うことができる走行支援装置を提供する。
【解決手段】 本発明の走行支援ECU1における走行道路種別判定部10では、ナビゲーション情報に基づいて判断した自車両の走行路の道路種別であるナビ情報道路種別に応じたナビ道路種別信号を生成する。走行支援抑制部12では、走行道路種別判定部10から出力されたナビ道路種別信号や各種信号に基づいて、走行支援の抑制を判断する。支援内容決定部11では、自車両に対する支援内容を決定する。また、支援内容決定部11は、走行支援抑制部12から支援抑制信号が出力された際、ナビゲーション情報の利用を中止するとともに、走行支援を抑制する。支援内容実行部13では、支援内容決定部11より出力された支援内容信号に応じた走行支援を行う。
(もっと読む)
運転支援制御装置及びプログラム
【課題】適切に運転支援を行なうことができるようにする。
【解決手段】GPSセンサ12によって、自車両の位置を検出する。規制種別取得部24によって、検出された自車両の位置に基づいて特定される、自車両が進入しようとしている交差点について、情報記憶部22に記憶された交差点進入口規制種別データから、自車側及び交差車両側の各々の交差点進入口の規制種別を取得する。注意義務度設定部26によって、規制種別取得部24によって取得された自車側及び交差車両側の各々の規制種別の組み合わせに対して、事故遭遇時の過失割合に対応する注意義務度を設定する。制御部28によって、設定された注意義務度に応じた運転支援を行なうように運転支援装置16を制御する。
(もっと読む)
情報表示装置、情報表示方法、及びプログラム
【課題】曲折時に運転者が気を取られることのないよう、画面の表示制御を行うことが可能な情報表示装置、情報表示方法、及びプログラムを提供する。
【解決手段】情報を表示する表示手段と、自車位置情報を取得する自車位置情報取得手段と、操舵装置の舵取り操作量を検出する検出手段と、を備え、操舵装置により舵取り操作可能に構成された車両に搭載される情報表示装置のコンピュータを、自車位置情報取得手段により取得された自車位置情報に基づいて自車が交差点に差しかかったか否かを判定し、自車が交差点に差しかかったと判定された場合に検出手段により検出された舵取り操作量が予め定められた値以上となったか否かを判定し、検出された舵取り操作量が予め定められた値以上となったと判定された場合に表示手段の表示を消去する制御手段、として機能させる。
(もっと読む)
画像処理装置
【課題】夜間における対向車のヘッドライト、先行車のテールライト、歩行者を同時に精度高く検出できる画像処理装置。
【解決手段】第1のシャッタ速度で第1の露光データを取得する手段と、前記シャッタ速度よりも低速な第2のシャッタ速度で第2の露光データを取得する手段と、第1のシャッタ速度よりも低速な第3のシャッタ速度で第3の露光データを取得する手段と、第1の露光データを可視濃淡画像に変換する手段と、該可視濃淡画像を出力する手段と、第2の露光データをカラー画像に変換する手段と、該カラー画像を出力する手段と、第3の露光データを赤外濃淡画像に変換する手段と、該赤外濃淡映像を出力する手段と、可視濃淡画像に基づいてヘッドライトを検知する手段と、カラー画像に基づいてテールライトを検知する手段と、赤外濃淡画像と前記カラー画像を演算して得られる画像に基づいて歩行者を検知する手段と、を備えた画像処理装置。
(もっと読む)
運転行動誘導システム
【課題】外部環境を考慮しながらドライバそれぞれの個人特性に応じた最適な運転行動へと誘導を行う。
【解決手段】外部環境認識部2で認識した車両周囲の外部環境、ドライバ状態推定部3で推定したドライバが把握している外部環境、運転評価部4で評価したドライバの運転評価情報、運転操作情報に基づいて、ドライバ誘導部6が、ドライバに提示する誘導刺激の候補群を選定し、選定した候補群の中から現在の運転状態に合致した誘導刺激を選択して出力する。これにより、外部環境を考慮しながらドライバそれぞれの個人特性に応じた最適な運転行動へと誘導を行い、運転の適切性を向上することができる。
(もっと読む)
ステレオ測定システムおよび動画再生システム
【課題】状況把握に必要な情報を確保しながら、保存するデータ量を削減したステレオ測定システムおよび動画再生システムを提供すること。
【解決手段】基準カメラで撮像された基準画像に第1フレームレートに基づいてデータ量削減処理を施して視認用画像データを生成し、基準画像と参照カメラで撮像された参照画像とから第2フレームレートに基づいて3次元状態把握画像データを生成し、視認用画像データと3次元状態把握画像データとを保存データとして保存することで、状況把握に必要な情報を確保しながら、保存するデータ量を削減したステレオ測定システムを提供することができ、視認用画像データに連動して3次元状態把握画像データに基づく3次元情報を表示する動画再生システムを提供することができる。
(もっと読む)
2,121 - 2,130 / 7,349
[ Back to top ]