
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,111 - 2,120 / 7,349
情報表示装置、情報表示方法、及びプログラム
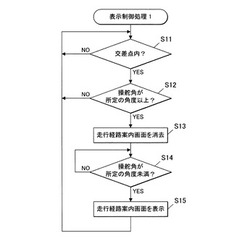
【課題】曲折時に運転者が気を取られることのないよう、画面の表示制御を行うことが可能な情報表示装置、情報表示方法、及びプログラムを提供する。
【解決手段】情報を表示する表示手段と、自車位置情報を取得する自車位置情報取得手段と、操舵装置の舵取り操作量を検出する検出手段と、を備え、操舵装置により舵取り操作可能に構成された車両に搭載される情報表示装置のコンピュータを、自車位置情報取得手段により取得された自車位置情報に基づいて自車が交差点に差しかかったか否かを判定し、自車が交差点に差しかかったと判定された場合に検出手段により検出された舵取り操作量が予め定められた値以上となったか否かを判定し、検出された舵取り操作量が予め定められた値以上となったと判定された場合に表示手段の表示を消去する制御手段、として機能させる。
(もっと読む)
ステレオ測定システムおよび動画再生システム

【課題】状況把握に必要な情報を確保しながら、保存するデータ量を削減したステレオ測定システムおよび動画再生システムを提供すること。
【解決手段】基準カメラで撮像された基準画像に第1フレームレートに基づいてデータ量削減処理を施して視認用画像データを生成し、基準画像と参照カメラで撮像された参照画像とから第2フレームレートに基づいて3次元状態把握画像データを生成し、視認用画像データと3次元状態把握画像データとを保存データとして保存することで、状況把握に必要な情報を確保しながら、保存するデータ量を削減したステレオ測定システムを提供することができ、視認用画像データに連動して3次元状態把握画像データに基づく3次元情報を表示する動画再生システムを提供することができる。
(もっと読む)
運転行動誘導システム
【課題】外部環境を考慮しながらドライバそれぞれの個人特性に応じた最適な運転行動へと誘導を行う。
【解決手段】外部環境認識部2で認識した車両周囲の外部環境、ドライバ状態推定部3で推定したドライバが把握している外部環境、運転評価部4で評価したドライバの運転評価情報、運転操作情報に基づいて、ドライバ誘導部6が、ドライバに提示する誘導刺激の候補群を選定し、選定した候補群の中から現在の運転状態に合致した誘導刺激を選択して出力する。これにより、外部環境を考慮しながらドライバそれぞれの個人特性に応じた最適な運転行動へと誘導を行い、運転の適切性を向上することができる。
(もっと読む)
車線検出装置
【課題】撮像された画像中から自車両の走行路に標示された車線を的確に検出することが可能な車線検出装置を提供する。
【解決手段】車線検出装置1は、自車両MCの周囲を撮像して画像Tを取得する撮像手段2と、画像T中の隣接する画素pの輝度差ΔDが閾値ΔDth内である画素p同士を1つのグループgとして統合する統合手段6と、平均輝度Dave等が所定の閾値の範囲内であるグループgを道路面グループGとして検出する道路面検出手段7と、画像Tの道路面グループG以外の画像部分を探索し、道路面グループGとの輝度の差δDが閾値δDth1以上であり、かつ、隣接する画素pとの輝度差ΔDが閾値ΔDth1以上である画素pを車線候補点cl、crとして検出する車線候補点検出手段8と、検出された車線候補点cl、crに基づいて画像T中に自車両の走行路に標示された車線LL、LRを検出する車線検出手段9とを備える。
(もっと読む)
道路走行支援システム
【課題】道路のカーブ区間の車両状況を他の車両の運転者に知らせる。
【解決手段】道路10のカーブ区間1における上下線の道路状況を撮影する広角カメラ14と、この広角カメラで撮影された広角画像23を平面画像24に変換し、変換された平面画像からカーブ区間1における車両の走行速度を算出する。算出されたカーブ区間1
にある車両の走行速度をカーブ区間に進入しようとしている上下線の他の車両12a、12bの運転者に対し表示する。
(もっと読む)
車両走行制御装置
【課題】この発明は、先行車の不安定な運転状態を精度良く検出し、運転者に警告し、通常よりも長めの車間距離で追従走行し、先行車を避けて車線変更することで、自車の不安定な挙動を抑制した追従走行が可能な車両走行制御装置を実現することを目的とする。
【解決手段】この発明は、自車が先行車との車間距離を維持した状態で追従走行するよう自車の車両速度を制御する車両走行制御装置において、先行車の車線幅方向における位置である横位置を検出する先行車横位置検出手段と、先行車横位置検出手段により検出された先行車横位置の時系列データを周波数解析する先行車横位置周波数解析手段と、先行車横位置周波数解析手段により解析された先行車横位置の周波数解析結果から先行車の運転状態を判定する先行車運転状態判定手段とを備えることを特徴とする。
(もっと読む)
道路形状認識装置
【課題】実際の道路形状を的確に検出することが可能な道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、自車両が走行する道路面について実空間上の距離Zと高さYの情報を有する距離データDを互いに異なる複数の地点で検出する距離高さ検出手段6と、複数の距離データDを自車両に近い側の群G1と遠い側の群G2とに分割し、群G1、G2の境界DL部分の距離データDを一方の群から他方の群に移し替えるごとに距離データDの近似直線L1、L2を算出する近似直線算出手段10と、距離データDを移し替えた群G1、G2ごとにそれぞれの近似直線L1、L2に基づく統計値をそれぞれ算出する統計値算出手段11と、統計値に基づいて近似直線L1、L2の組み合わせの中から1つを選択し、選択した近似直線L1、L2の組み合わせを用いて道路形状モデルを生成する道路形状モデル生成手段12とを備える。
(もっと読む)
周辺状況画像表示システム
【課題】視界状況が悪い場合でも、車両の運転手に確実に周辺状況画像を提供できる周辺状況画像表示システムを提供する。
【解決手段】設置された位置から延びる複数の道路に沿った複数の方向における周辺の状況を撮影して複数の周辺状況画像を得る撮影手段1、複数の方向のいずれか1つに位置する受信者からの要求に応じて複数の周辺状況画像のうちの少なくとも1つの周辺状況画像を選択する画像選択手段2および選択された周辺状況画像を受信者に送信する画像送信手段3を含む周辺状況画像送信装置7と、周辺状況画像送信装置7に複数の周辺状況画像のうちの少なくとも1つの周辺状況画像を要求する要求手段4、画像送信手段3から送信された周辺状況画像を受信する画像受信手段5および受信した周辺状況画像を表示する画像表示手段6を含む、受信者が有する周辺状況画像受信装置8とを備えている周辺状況画像表示システム13である。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
車両の運転支援装置
【課題】 後続車の煽り走行による運転ミスの発生を防止する。
【解決手段】 運転支援制御部34は車間距離センサ1の出力から後続車の煽り走行を検出すると、自動的に、後方視界可変部3を制御し、ルームミラー2による後方視界を通常状態から可変し、ドライバの目に後続車が入らないようして不安や焦りが生じたり、増大するのを防止する。また、車載用ナビゲーション装置10の退避可能場所検索・案内部18に退避可能場所の検索・案内を指示し、現在位置・現在方位データと道路データを用いて、走行中の道路前方の退避可能場所を検索させ、画像と音声で案内させる。これにより、ドライバが焦って退避可能な場所を目で探しながら運転しなくても済む。更に、音警告部4と光系警告部5を稼働し、後続車に警告を発して安全走行を促す。
(もっと読む)
2,111 - 2,120 / 7,349
[ Back to top ]