
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,091 - 2,100 / 7,349
運転支援装置および運転支援システム
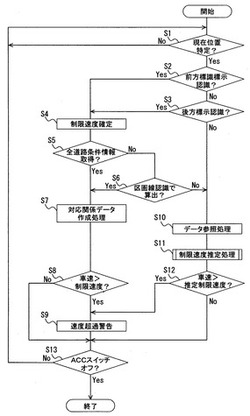
【課題】より汎用性を有するとともに、道路標識や路面標示の画像認識による走行中の道路の制限速度の特定を行うことができない場合であっても走行中の道路の制限速度をより精度良く推定することを可能にする。
【解決手段】道路種別の情報と車線数の情報および幅員の情報のうちの少なくともいずれかの情報とを最低限組み合わせた情報である道路条件情報と制限速度の情報との対応関係を示す対応関係データを格納している制限速度データベース27と、車両3の走行中の道路の道路条件情報を取得し、取得した道路条件情報をもとに制限速度データベース27に格納されている対応関係データを参照し、当該道路条件情報に対応する制限速度の情報を得て、当該制限速度の情報をもとに当該走行中の道路の制限速度を推定する制御装置26と、を備える。
(もっと読む)
標識認識装置

【課題】認識した道路標識の有効範囲を正しく判定して、運転者への正確な道路標識の提示を可能とする標識認識装置を提供する。
【解決手段】標識及び補助標識が示す有効道路区間数、距離、有効時間帯、車両状態の条件等の有効範囲条件を予め格納している標識有効範囲データ記録部7と、車両前方を撮像した道路画像を用いて、標識と補助標識を認識する標識認識部2と、車両の現在位置、車種、状態等を示す車両情報を取得する車両情報取得部4と、車両周辺の地図情報を取得する地図情報取得部3と、標識有効範囲データ記録部7の有効範囲条件、車両情報及び地図情報を用いて、当該車両が、標識認識部2で認識した標識と補助標識で指定された有効範囲にいるか否かを判定する標識有効範囲判定部5を備える。
(もっと読む)
運転支援装置
【課題】よりドライバーに違和感を与えずに運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】信号機の点灯状態に関する信号機情報を取得する通信装置104と、通信装置104が取得した信号機情報に基づいた最初のサービスを実行可能であり、最初のサービスの実行後に、信号機情報に基づいた後続のサービスを実行可能なインフラ協調ECU110とを備えた運転支援装置100において、インフラ協調ECU110は、第最初のサービス及び後続のサービスの内のいずれか一方を実行しないときは、もう一方のサービスも実行しないため、一部の種類の情報提供しかなされずに、期待していた他の種類の情報提供が行われないといったドライバーに違和感を与える事態を防止できる。
(もっと読む)
走行車線検出装置
【課題】後視カメラの画像により現在の走行車線を検出する装置では、車線変更しても後視カメラの画像にそれが表れるのにタイムラグがあり、車線変更の検出遅れが生じるので、後視カメラの画像を利用しても検出遅れの生じない「車線変更検出装置」を得る。
【解決手段】後視カメラの撮影画像により走行車線を検出している時、車線境界線の傾斜角を測定し、車線境界線が所定以上傾斜したことを測定し検出した時、測定した傾斜角と、車速と、測定の開始時からの経過時間とにより、車両が横方向に移動した距離を演算し、この横方向移動量が所定距離以上の時には、後視カメラで車線の移動を検出しなくても、車両が車線を変更したと判断し、走行車線の表示を変更する。このとき予めデータベースから右折レーンにより車線が増加する等のデータを入力しておくと、そのタイミングで前記横移動が発生すると、走行車線が移動したものとしてより早く先読みできる。
(もっと読む)
運転支援装置、及びプログラム
【課題】簡易な構成で、ドライバの運転を安全な運転及び省燃費な運転に導く。
【解決手段】自車両1の速度を検出する車速センサ16と、周辺車両90と自車両1との間の車間距離D[m]を検出する車間距離センサ14と、予め定められた車間時間32aに対応する自車両1のドライバの心理状態が登録されたテーブル32及び予め定められた車間時間30aに対応する周辺車両90のドライバの心理状態が登録されたテーブル30を記憶したHDD18とを含んで構成し、検出された速度V[m/s]及び検出された車間距離D[m]に基づいて、車間時間T[s]を演算し(ステップ108)、演算された車間時間T[s]及びHDD18の記憶内容に基づいて、演算された車間時間T[s]に対応する自車両1のドライバの心理状態及び周辺車両90のドライバの心理状態を自車両1のドライバに報知するように制御する(ステップ110、112、114)。
(もっと読む)
入眠判定システム
【課題】本発明は、被験者の入眠状態を精度良く判定することができる入眠判定システムの提供を目的とする。
【解決手段】被験者の心拍数に基づいて、8拍の移動平均であるCVRR8平均心拍数を算出するとともに、1拍毎の心拍数の変化である瞬時のリアルタイム心拍数を算出する。そして、前記CVRR8平均心拍数と前記リアルタイム心拍数を比較して、前記CVRR8平均心拍数に対して前記リアルタイム心拍数がマイナス側に有意差が生じた場合、被験者が入眠状態であると判定する。
(もっと読む)
逆走検知装置、および、逆走通知方法
【課題】車両が逆走していることを、高速かつ確実にユーザに通知する技術を提供する。
【課題を解決するための手段】
本発明の逆走検知装置は、車両に対して情報を配信する路側機から、当該情報の受信対象とされる車両の到来方向を示すデータを受信する通知処理部と、車両の現在位置および進行方向を特定する現在位置算出部と、路側機から受信したデータで特定される車両の到来方向と、現在位置算出部が特定した進行方向と、を比較して、車両が逆走しているか否かを検出する逆走判定部と、逆走を検出した場合には、検出した旨を通知する表示処理部と、を備える。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
走行支援装置および走行支援方法
【課題】自車両が走行する走路に、物体が飛び出す可能性を適切に算出することができる走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段10と、撮像した画像の情報に基づいて、画像中で移動した物体のエッジ成分を抽出する抽出手段と、画像中の所定領域において、抽出手段により抽出されたエッジ成分に対応する画素が複数連続してなる画素列を構成する各画素のうち、高さ方向において最も下側に位置する画素の位置を最下点位置として検出する最下点位置検出手段と、車両の進行方向に沿って、最下点位置同士を結ぶ直線を、自車両が走行する走路の境界線として検出する境界線検出手段と、を備える走行支援装置において、最下点位置に基づいて、自車両の進行方向の空間と交差する空間である交差空間を検出する交差空間検出手段と、検出された交差空間に基づいて、自車両が走行する走路上に、物体が飛び出す可能性を算出する算出手段と、を有することを特徴とする走行支援装置。
(もっと読む)
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
2,091 - 2,100 / 7,349
[ Back to top ]