
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
2,051 - 2,060 / 7,349
車両制御装置
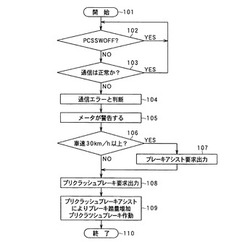
【課題】本発明は、ETCシステムの通信不良時に、車両のETCゲートとの接触を回避できる可能性を高めることを目的としている。
【解決手段】このため、レーダにより自車両前方に先行する車両あるいは前方障害物との距離を検出する距離検出手段と、少なくとも、距離検出手段により検出された先行する車両あるいは前方障害物との距離が設定距離より短い場合に、自動制御させる自動制御手段とを備えた車両走行制御装置と、道路に設置された自動料金収受装置と通信する自動料金収受装置用車載装置とを備えた車両制御装置において、車両が自動料金収受装置に接近し、自動料金収受装置用車載装置と自動料金収受装置との通信が不良であると判定された時には、自動制御手段により車両速度を減速する減速手段を備えている。
(もっと読む)
少なくとも1つの設定された画像要素の少なくとも一部を検出およびクラス分類する、車両のドライバーアシストシステム用の画像処理方法
車両のドライバーアシストシステムの画像センサによって検出されて探索される少なくとも1つのディジタル画像内で、交通標識またはその一部を含む少なくとも1つの設定された画像要素の少なくとも一部を検出およびクラス分類する、画像処理方法において、前記少なくとも1つのディジタル画像の少なくとも1つの画像領域から、複数のスケール不変の第1の画像特徴およびその幾何学的相対配置を計算し、ついで、該複数のスケール不変の第1の画像特徴およびその幾何学的相対配置を、クラシフィケータにより、少なくとも1つの設定された画像要素から計算されて記憶および/または学習された複数のスケール不変の第2の画像特徴およびその幾何学的相対配置と比較し、比較の結果、充分な一致が判別された場合、前記少なくとも1つのディジタル画像内に前記少なくとも1つの設定された画像要素を検出およびクラス分類する。  (もっと読む)
(もっと読む)
駐車支援装置及び駐車支援方法

【課題】目標駐車位置への誘導を開始することが可能な範囲をさらに拡大して、より多くの駐車シーンに対応できるようにする。
【解決手段】駐車支援コントローラ10に自動操舵経路と手動末切り経路との双方の経路演算を行う機能を持たせ、様々な駐車シーンに対応させて、自動操舵経路と手動末切り経路のうちでいずれか有利な誘導経路を選択し、選択した誘導経路に沿って自車を目標駐車位置へと誘導する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
リスク認識システム
【課題】移動体の外界環境に含まれる危険度を認識するためのルールをドライバの運転行動との関係からより直接的に求め、ドライバの状態による差や個人差を許容するルールを抽出して、高精度な危険認識を可能とする。
【解決手段】データ点数を或る程度の時間長で区切り、各学習データD34,D35,D38,D48,D55,D56から冗長性を排除してデータ識別に必要最小限の属性集合を抽出し、極小決定ルールR34,R35,R38,R48,R55,R56を導く。そして、各極小決定ルールに対して、未学習データを信頼度で降順に並べ、所定の閾値以下のデータを削除してクロスバリデーション方式で評価を行うことで、ルールR'34,R'35,R'38,R'48,R'55,R'56を選定する。これにより、ドライバの状態による差や個人差を許容するルールを抽出して高精度な危険認識を可能とするばかりでなく、過学習を防止することができる。
(もっと読む)
視認行動情報提示装置
【課題】 車両の運転開始から運転終了までの所定の期間に亙る運転者の視線配分を的確に評価できるようにする。
【解決手段】 視線検知手段15は車両の運転者の視線の方向を検知し、記憶手段M1は前記視線の方向のデータを記憶し、視認行動情報生成手段M2は運転の開始から終了までの1ドライブサイクル内に記憶手段M1に記憶されたデータから運転者の視認行動情報を生成し、視認行動情報提示手段M3は前記視認行動情報をモニタ28に提示するので、1ドライブサイクルに亙る視線行動情報を客観的に評価して運転者に認識させ、運転者の安全運転に対する意識を高めることが可能となる。しかも1ドライブサイクルの終了後に視線行動情報を提示するので、運転者の運転操作の邪魔になったり、運転者が煩わしさを感じたりすることがない。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】目標駐車位置への誘導を開始することが可能な範囲をさらに拡大して、より多くの駐車シーンに対応できるようにする。
【解決手段】自車を後退開始位置P3から目標駐車位置P2へと誘導するための誘導経路として、一般的な経路パターンである標準パターンの標準経路のほかに、回避ポイントAP1を回避しつつ目標駐車位置P2に正確に駐車させる障害物回避経路を計算する機能を駐車支援コントローラに持たせる。駐車支援コントローラは、回避ポイントAP1を避けて目標駐車位置P2に正確に駐車できる標準経路が算出できない場合は、誘導経路の経路パターンを標準パターンから障害物回避パターンに変更して障害物回避経路を算出し、この障害物回避経路に沿って自車を目標駐車位置P2へと誘導する。
(もっと読む)
車両支援システム
【課題】道路において車両から離れた位置で同車両の接近を確実に警告できる低消費電力型の車両支援システムを提供する。
【解決手段】道路の近傍の第1の位置に設置され、複数の異なる指向性を持って車両の走行音を集音する集音器と、道路の近傍の第1の位置から道路の走行方向に沿って所定距離離れた第2の位置に設置される表示器と、集音器の集音結果に基づいて、車両の進行方向が第2の位置に近づく方向又は第2の位置から遠ざかる方向の何れであるのかを判定し、車両の進行方向が第2の位置に近づく方向である場合、表示器に車両の接近を警告表示させる制御装置と、を備えたことを特徴とする車両支援システムである。
(もっと読む)
障害物認識装置
【課題】本発明は、車体が傾いた場合でも適切に障害物を認識することができる障害物認識装置を提供することを課題とする。
【解決手段】移動体に搭載される障害物認識装置1であって、移動体の周辺の物体を検出する物体検出手段10,31と、移動体の車体の傾斜に応じて物体検出手段10,31で検出可能な走行面の領域を算出する面領域算出手段32とを備え、物体検出手段10,31で検出した物体のうち面領域算出手段32で算出した走行面の領域に存在する物体を障害物として認識しないことを特徴とする。
(もっと読む)
運転支援装置及びプログラム
【課題】追い越し動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、自車両の走行する第一の車線の前方を走行する他車両を検出し(S101:YES)、他車両が走行している道路を他車両が走行し続けると予測される場合(S102:YES)、当該他車両を対象車両として特定し(S103)、左側追い越し判定処理を行う(S104)。自車両2が、第一の車線よりも道路の中央寄りではない第二の車線に車線変更し、対象車両を追い抜き、所定時間内に対象車両の前方において第一の車線へ車線変更した場合、当該追い越し動作を危険動作と判定する(S106)。これにより、追い越し動作が適正でない場合には危険動作であると判定するので、追い越し動作を適切に評価することができる。
(もっと読む)
2,051 - 2,060 / 7,349
[ Back to top ]