
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
371 - 380 / 7,349
後側方障害物検知装置
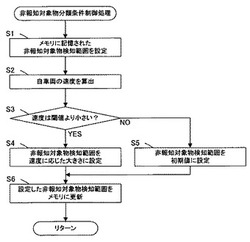
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
物体識別装置

【課題】物体を識別するための計算量を低減すると共に、識別性能を向上させることができる物体識別装置を提供する。
【解決手段】学習処理部4は、コードブックの各小領域画像パターンにつき、物体のクラス番号及び位置情報と出現確率との関係を表す関数テーブルを生成し、各クラス間における特徴量の共用度を表すシェアリングマトリクスを求め、特徴量が類似するクラス同士をまとめた樹形図を作成し、小領域画像パターン毎に樹形図の各ノードの重みを計算する。認識処理部7は、カメラ2で取得した撮像画像データをコードブックと照合し、複数の小領域画像パターンのうち最も近い小領域画像パターンを選択し、その小領域画像パターンについて重みが閾値以上となるノードの中で重みが最も小さいノードに係るクラスを抽出し、そのクラスに対して小領域画像パターンの位置情報を投票して、物体を認識する。
(もっと読む)
車両用障害物警告装置
【課題】運転者が視線をバックミラーやサイドミラーに向けてバックミラーやサイドミラーに映る障害物を見る前に、障害物を認識しやすくすることができる車両用障害物警告装置を提供することを課題とする。
【解決手段】障害物が検出されると、障害物を表示した画像表示装置6の画面上に障害物が検出されたことを示す警告表示71を加え、この警告表示71は、画像表示装置6の表示画面の周縁に沿った枠線状の表示形態であり、この表示形態が点灯または点滅する。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
走行支援装置及び走行支援システム
【課題】車間通信によって追従走行用の情報を送信する場合に、追従走行用の情報を送信する頻度を必要に応じた頻度に抑えることで輻輳の発生を回避することを可能にする。
【解決手段】予測用情報を新たに取得した場合に、既に送信した過去の予測用情報をもとに求められた現在時点における予測到達点と、新たに取得した予測用情報に含まれている現在位置との乖離の度合いを求め、求めた乖離の度合いが所定値以上であるか否かを判定する。そして、乖離の度合いが所定値以上と判定した場合には、新たに取得した予測用情報を送信する。
(もっと読む)
車両周辺監視装置
【課題】表示されている車両周辺撮影画像外で認識された障害物、及び、障害物画像で表示された障害物と車両との相対位置関係を運転者が容易に把握できる車両周辺監視装置。
【解決手段】車両周辺の撮影画像の一部分である狭視野領域を注目撮影画像として生成し、車両周辺で認識された障害物の撮影画像における領域である障害物領域を算定し、障害物領域が狭視野画像外に含まれている場合、少なくとも前記障害物領域を含む注目障害物画像を前記撮像画像から生成するとともに、車両に対する注目障害物画像の相対位置を示す指標画像を出力する。注目撮影画像が表示されているモニタ画面に注目障害物画像と指標画像とがポップアップ表示されるように注目障害物画像と指標画像と注目撮影画像とが合成される。
(もっと読む)
運転支援装置および運転支援方法
【課題】車両周辺の障害物との接触を回避するために、ユーザが、どのようにステアリング操作を行えば障害物を回避することができるかについて直感的に把握することが可能な「運転支援装置および運転支援方法」を提供する。
【解決手段】自車両と障害物とが接触する可能性がある場合、自車両が障害物との接触を回避するための第2のステアリング操舵角を算出し、現在のステアリング操舵角である第1のステアリング操舵角から回転して第2のステアリング操舵角となるまでの角度を示す角度画像630(650)、および、第1のステアリング操舵角から第2のステアリング操舵角に向かうステアリングの回転方向を示す方向画像620(640)を表示することにより、ユーザが、どの程度、どの方向にステアリング操作を行えば良いのかをそれぞれ具体的な情報として認識することができるようにする。
(もっと読む)
走行支援システム
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
衝突危険度判定装置
【課題】衝突危険度を精度よく判定する。
【解決手段】衝突危険度判定装置100では、環境検出部5bにより移動物の位置分布及び移動状態分布を検出し、マップ生成部5cにより存在可能度マップを生成する。移動物生成部5d、位置更新部5e及び分布変更部5fにより、存在可能度マップ上にて移動物の将来位置分布を予測する。進路候補演算部5aにより、自車両10の進路候補を複数演算する。危険度候補演算部5hにより、存在可能度マップ上で複数の進路候補それぞれの衝突危険度候補を演算する。そして、危険度判定部5iにより、演算された複数の衝突危険度候補に基づき複数の進路候補のうち一の進路候補を選択し、選択した当該一の進路候補の衝突危険度候補を衝突危険度として判定する。ここで、危険度候補演算部5hは、移動コストと運動コストと衝突確率とに基づき衝突危険度候補を演算する。
(もっと読む)
携帯端末装置およびこれを備えた運転評価システム
【課題】カメラ等の周辺状況認識機能と車両ドライバの視線検知機能を有する携帯端末装置を利用することにより、車両側のコストを抑えつつ、車両ドライバの認知負担の軽減を図る。
【解決手段】車両とその周辺の障害物との関係を示す周辺状況を認識する携帯端末装置1の前方カメラ3と、その周辺状況下における当該車両のドライバの視線を検知する後方カメラ5と、前方カメラ3により認識された周辺状況と類似する状況下において模範とすべき模範ドライバの視線に関する模範視線情報を保持する記憶部7とを備え、後方カメラ5により検知された視線に関する実視線情報と記憶部7に保持された模範視線情報とに基づいて自車両のドライバの視線と模範ドライバの視線とのずれを視線情報照合部9により評価する機能を有する携帯端末装置1を利用することにより、車両側のコストを抑えつつ、車両ドライバの認知負担の軽減を図ることができる。
(もっと読む)
371 - 380 / 7,349
[ Back to top ]