
国際特許分類[G11B21/08]の内容
物理学 (1,541,580) | 情報記憶 (112,808) | 記録担体と変換器との間の相対運動に基づいた情報記録 (95,120) | 記録または再生方法に特徴がないヘッド機構 (3,214) | ヘッドの駆動または移動 (1,727) | トラック変更または選択 (131)
国際特許分類[G11B21/08]に分類される特許
41 - 50 / 131
ディスク装置、制御装置およびプログラム
【課題】ディスク装置のロード時におけるヘッド速度の変化量を抑制し、ヘッド速度が目標値に収束する時間を早める。
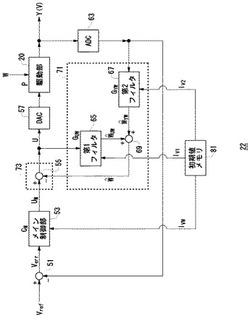
【解決手段】ディスクと、ヘッドと、ヘッドを支持するアームと、入力される操作量に応じた速度でアームを軸を中心に回転運動させることによりディスクの面上および面外にヘッドを移動させる駆動部20と、ディスク上から退避したヘッドを収容するランプ部と、ヘッドをランプ部からディスク上へとロードする際のアームの移動速度を制御する制御部22とを備え、制御部22は、駆動部20によりアームを動かす場合に加わる外力を推定する推定部71と、推定された外力に応じて操作量を補正する補正部73とを有する。
(もっと読む)
直流モータ制御装置

【課題】トラバースモータの印加電圧が起動電圧以下であっても、安定したトラバースモータ制御を行うことができる直流モータ制御装置を提供する。
【解決手段】トラバースモータ15を制御するためのトラバース制御信号S105がトラバースモータ15の起動電圧より高い値に設定された基準値に達しているかを判定する判定手段341と、トラバース制御信号S105の値と基準値との比をデューティ比として、トラバース制御信号S105をPWM変調し、基準値より高い振幅を有する制御パルス信号S108を生成する制御パルス生成手段342と、トラバース制御信号S105を増幅して増幅信号S109を生成する増幅手段343と、トラバース制御信号S105が基準値以下の場合は制御パルス信号S108を、基準値を超えた場合は増幅信号S109を選択して、トラバースモータ15を制御するため制御信号として出力する選択手段344とを備える。
(もっと読む)
ヘッド制御装置およびこれを用いたディスク装置
【課題】低温環境におけるアクチュエータのピボット軸受の粘性抵抗を低下させ、低温時においても安定したロード動作、アンロード動作あるいはシーク動作を行い、信頼性の高いヘッド制御装置およびそれを備えたディスク装置を提供する。
【解決手段】ヘッド2の目標速度と現在のヘッド速度との差である速度誤差をもとに出力された制御駆動電流Iをアクチュエータ5に供給して、アクチュエータ5を目標位置に移動させるようにした構成とし、さらにアクュエータ5を振動させる振動印加部11を設け、環境検出部9によって推定した動作環境温度に応じて粘性制御部10からの出力によって振動印加部11に高周波振動を与える構成を有したヘッド制御装置およびそれを備えたディスク装置である。
(もっと読む)
サーボ同期パターンの形成方法、書き込みエラー防止方法、及びハードディスクドライブ装置
【課題】サーボ同期パターンの形成方法、書き込みエラー防止方法、及びハードディスクドライブ装置を提供する。
【解決手段】偶数トラックに第1サーボ同期表示パターンを形成するステップと、奇数トラックに前記第1サーボ同期表示パターンと区別される第2サーボ同期表示パターンを形成するステップと、を含むことを特徴とする、サーボ同期表示パターンの形成方法が提供される。これにより、外部衝撃によるサーボの不安定及びヘッドの移動発生時に隣接トラックにデータが書き込まれる書き込みエラー問題を最小化することができる。
(もっと読む)
記録ディスク及びディスク装置
【課題】記録ディスクに記録されるサーボデータの量を節約することが可能な記録ディスク及びディスク装置を提供する。
【解決手段】磁気ディスク1に形成されたトラック2には、第1サーボデータ領域10を基準とした再生進行方向HRの先に複数の第2サーボデータ領域20が配置されており、この組が再生進行方向HRに沿って繰返し配置されている。第2サーボデータ領域20に含まれる第2セクタデータ部は、この第2サーボデータ領域20の位置が第1サーボデータ領域10の位置から再生進行方向HRに沿ってどの程度ずれているかを表すデータが記録されており、また、第1サーボデータ領域10に含まれる第1セクタデータ部よりもデータ量が少ない。
(もっと読む)
記憶装置及び制御方法
【課題】シーク残留振動を低減してシーク完了からオントラックに移行する時間を短縮して装置性能を高める。
【解決手段】アクチュエータ56は回転自在に支持された軸部の一端にヘッド22を支持すると共に他端にボイスコイルモータのコイル62を支持し、ヘッド22を記録媒体の任意のトラック位置に移動する。センサ50はアクチュエータ56のコイルサポート部64に取り付けられ、コイル振動を検出して振動検出信号を出力する。制御部は、アクチュエータ56の駆動によりヘッドを媒体上の目標トラック位置に移動して引き込むシーク時及びセトリング時に、センサ50の振動検出信号に基づいてヘッド位置誤差信号を低減するようにアクチュエータ56を制御する。センサ50の振動検出信号には、アクチュエータ56を駆動した際のコイル62の曲げ振動成分とコイルのねじり振動成分を含む。
(もっと読む)
媒体記憶装置、位置復調装置及び位置復調方法
【課題】位相サーボパターンを用いて、位置を復調する位置復調装置において、精度を低下せずに、復調範囲を拡大する。
【解決手段】同一の位相である第1、第2の位相パターンと、逆位相で、且つ互いに位相が異なる第3、第4の位相パターンとで構成されたサーボパターンを記録媒体(10)に形成し、第1、第2の位相パターン領域と第3の位相パターン領域の再生信号の第1の位相差により、第1のトラック範囲の位置情報を復調し(400)、第3の位相パターン領域と第4の位相パターン領域の再生信号の第2の位相差により、第2のトラック範囲の位置情報を復調し(404)、第1の位相差と第3の位相パターン領域の再生信号の位相との角度差に応じて、第1の位相差から第3のトラック範囲の位置情報を復調する(402)。誤差の少なくなった絶対値角度である第3の位相パターン領域の位相を使用して、第2のトラック範囲の復調範囲を拡大できる。
(もっと読む)
記録媒体処理装置、撮像装置、記録媒体処理方法、記録媒体処理プログラム、および記録媒体処理プログラムを記録したプログラム記録媒体
【課題】安定した情報処理を実施可能なディスクカメラレコーダを提供する。
【解決手段】ディスクカメラレコーダは、衝撃判断手段41にて外部からの衝撃があったことが認識されると、ピックアップ移動制御手段42は、ステッピングモータ232に所定の電圧を印加して静止励磁状態にしてホールディングトルクを発生させる。これにより、ホールディングトルクによって光ピックアップ220の移動が規制され、衝撃に対して抗することができ、光ピックアップ220の位置ずれを防止することができる。したがって、衝撃により発生する位置ずれにより光ピックアップ220における情報処理動作が停止されず、安定して光ディスクDに対して情報処理動作を実施することができる。
(もっと読む)
VCMドライバと磁気ディスク制御装置
【課題】シーク動作の短縮化を図ったVCMドライバ及び磁気ディスク制御装置を提供する。
【解決手段】磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して電流制御信号を形成する。VCMドライバは、上記制御信電流信号に従って上記磁気ヘッドの位置制御を行う。上記VCMドライバは、電流電圧変換部と駆動回路部と帰還回路とを有する。上記電流電圧変換部は、上記電流制御信号に対応した駆動電圧を形成する。駆動回路部は、上記電流電圧変換部で形成された駆動電圧を受けて、PWM動作により上記ボイスコイルモータの駆動電流を形成する。上記帰還回路は、上記駆動回路部の出力オフセット分を上記駆動電圧に負帰還させる。
(もっと読む)
ディスク記憶装置及びヘッド移動制御方法
【課題】ヘッドがディスク媒体上に存在する欠陥部分を通過しないように制御することで、後発欠陥の発生などの事態を未然に回避できるディスク記憶装置を提供することにある。
【解決手段】ヘッド移動制御システムを有するディスク記憶装置において、欠陥位置情報に基づいてヘッドが欠陥部分に近接する近接位置を判定する欠陥近接判定部6、及び欠陥近接判定部6の判定結果に基づいて、ヘッドが欠陥部分の移動を回避するようにヘッドの移動軌跡を変更する回避軌道生成部7を含む欠陥回避部5を備えた構成である。
(もっと読む)
41 - 50 / 131
[ Back to top ]