
国際特許分類[G11B21/08]の内容
物理学 (1,541,580) | 情報記憶 (112,808) | 記録担体と変換器との間の相対運動に基づいた情報記録 (95,120) | 記録または再生方法に特徴がないヘッド機構 (3,214) | ヘッドの駆動または移動 (1,727) | トラック変更または選択 (131)
国際特許分類[G11B21/08]に分類される特許
51 - 60 / 131
二自由度位置制御方法、二自由度位置制御装置および媒体記憶装置
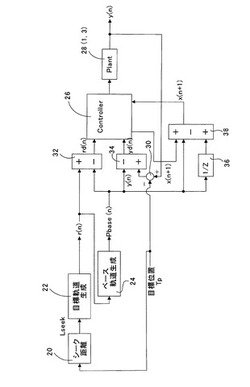
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、固定小数点のプロセッサを用いて、計算精度を向上する。
【解決手段】オブザーバを使用した二自由度制御系(26)の入力である目標位置軌道、位置誤差を基準軌道を基準とした相対値とし、オブザーバの状態変数が、基準位置からの相対的な距離を保持するようにした。絶対的な距離を保持する場合に比べて,値の変化する範囲が小さくなり、固定小数点方式でも、小数点の有効桁数を増加でき、計算精度が改善できる。このため、加速区間における制御電流が滑らかになり、共振や騒音の発生を防止でき、定速区間や減速区間では、残留振動の発生を防止でき、シーク時間を短縮できる。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置

【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
2自由度位置制御方法、2自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、演算による出力遅延による位置精度劣化を防止する。
【解決手段】オーバーラン防止のための二自由度制御系において、二自由度制御の出力の遅延(演算遅延及び駆動アンプ、D/Aコンバータ等のハード遅延)を考慮して、サンプル時点から遅延分進んだTdの推定状態を演算し、この推定状態から出力を演算する。サンプル時点から、計算中に状態変化があっても、出力遅延の影響を防止し、精度の高い位置制御が可能となり、オーバーランを防止できる。
(もっと読む)
トラックジャンプ制御回路
【課題】トラックジャンプの精度を向上させる。
【解決手段】ヘッダ情報が予め記録されたヘッダ部と、データが記録されるデータ部とを有した光ディスクに対して、光ピックアップが受光した前記光ディスクからの反射光より生成される二値化トラッキングエラー信号のパルス数をカウントしていくことで、前記光ピックアップを現走査トラック位置から目標走査トラック位置へとジャンプさせる制御を行うトラックジャンプ制御回路において、前記二値化トラッキングエラー信号のエッジ間隔をカウントするカウンタと、前記カウンタが生成したカウント値を保持する保持回路と、前記保持回路に保持されたカウント値と前記二値化トラッキングエラー信号を用いて、前記二値化トラッキングエラー信号の補正信号を生成する補正処理回路と、前記光ピックアップが前記ヘッダ部を通過したことを示すヘッダ部検出信号に応じて前記二値化トラッキングエラー信号又は前記補正信号を選択出力するセレクタと、を有する。
(もっと読む)
制御装置、記憶装置、サーボ情報復調プログラム及びサーボ情報復調方法
【課題】ヘッドの高速シークに伴って発生する該ヘッドの復調移動速度のオーバーフローを補正して、より正確な復調移動速度を得ることを可能とする。
【解決手段】本発明の磁気ディスク装置300の位置及び速度復調回路100は、同一セクタ内のサーボ情報であるEven1及びEven2のサーボ再生信号の位相差に基づいて磁気ヘッドの移動速度を復調する差分算出部105と、差分算出部105により算出された復調移動速度のオーバーフローを検出して該オーバーフローの補正値を計算するオーバーフロー検出部108とを備え、オーバーフロー検出部108により検出されたオーバーフローを補正値に基づいて補正してより正確な復調速度を出力する構成を取ることによって、ヘッドの高速シーク時においてもより正確な復調移動速度を得ることを可能とした。
(もっと読む)
制御装置、記憶装置、記憶媒体、サーボ情報復調プログラム及びサーボ情報復調方法
【課題】記憶装置において、復調速度の回転同期成分の誤差を補正し、補正された復調速度を使用してヘッドの移動速度の正確なフィードバック制御を行うことを可能とする。
【解決手段】本発明の磁気ディスク装置300の位置及び速度復調回路100は、同一セクタ内のサーボ情報であるEven1及びEven2のサーボ信号の位相差に基づいて磁気ヘッドの移動速度を復調する差分算出部105と、差分算出部105により算出された復調移動速度のオーバーフローを検出して該オーバーフローの補正値を計算するオーバーフロー検出部108とを備え、オーバーフロー検出部108により検出されたオーバーフローを補正値に基づいて補正し、該復調速度の回転同期成分の誤差の補正値でさらに補正してより正確な復調速度を出力する構成を取ることによって、ヘッドの高速シーク時においてもより正確な復調移動速度を得ることを可能とした。
(もっと読む)
ディスクの回転スリップによるデータセクターの位相補正方法およびディスクドライブ装置
【課題】ディスクの回転スリップによるデータセクターの位相補正方法を提供する。
【解決手段】複数のディスク間のサーボセクターの位相差を測定するステップ(S510)と、複数のディスク間で測定されたサーボセクターの位相差に基づいて、スイッチングされる複数のディスク間の論理データセクターのシリンダースキュー量を調整するステップ(S520)と、を含む。かかる方法によれば、複数のディスク間で測定されたサーボセクターの位相差に基づいて、スイッチングされる複数のディスク間で論理データセクターのシリンダースキュー量が調整される。これにより、ディスクスイッチング時に、ディスク間で調整されたシリンダースキュー量に基づいて、論理データセクターアドレスを割当てることが可能となり、ディスクドライブ装置のデータ読取りおよび書込み性能を向上させることができる。
(もっと読む)
磁気ディスク装置とそのヘッド制御方法
【課題】磁気ディスク装置において、CPUから連続アクセスされた場合でも、磁気ヘッドが同一箇所に留まることによる損傷等を防止する。
【解決手段】CPU等からアクセス対象の論理アドレスLBAが与えられると、アクセスアドレス管理部2によって管理テーブル3が参照され、磁気ディスクのシリンダ番号を含む物理アドレスに変換されると共に、シリンダ毎にアクセスの回数及び累積時間が管理される。時間監視部4では、磁気ヘッドが一定の位置で継続して浮上している時間が監視され、この定位置浮上時間が所定の時間を超えたときに、アクチュエータ7によって磁気ヘッド8の位置が移動させられる。また、アドレス配置制御部5は、アクセスの回数または累積時間が定められた閾値を超えたシリンダがあるときに、そのシリンダ内のデータを他のシリンダに移管させると共に磁気ディスクの論理アドレスを再配置する。
(もっと読む)
ボイスコイルモータの制御回路、それを用いたディスク装置
【課題】ボイスコイルモータの逆起電圧を検出するためのキャリブレーションの精度を改善する。
【解決手段】検出抵抗Rsは、VCM1と直列に接続される。第1増幅器AMP1は、検出抵抗Rsの両端に発生する検出電圧Vsを増幅する。第1駆動回路10は、第1増幅器AMP1の出力電圧Vs1にもとづいて、VCM1を駆動する。第2増幅器AMP2は、第1増幅器AMP2により増幅された検出電圧Vsを、さらに増幅する。キャリブレーション回路14は、VCM1の回転が停止した状態において、VCM1の両端に発生するモータ電圧Vvcmが、第1、第2増幅器AMP1、2により増幅された検出電圧Vs2と一致するように、少なくとも第2増幅器AMP2の増幅率g2を調節する。第2駆動回路12は、検出電圧Vs2と、モータ電圧Vvcmとの差に応じた電圧を、逆起電圧として、VCM1の回転を制御する。
(もっと読む)
位置決め制御装置の整定判定方法及び位置決め制御装置
【課題】対象物が目標位置に整定したことを判定する整定判定方法において、整定判定のマージンを拡大し、正確に整定判定する。
【解決手段】整定判定ブロック(24)の整定判定式として、位置誤差と、位置誤差の複数サンプル数の加算値とを併用する。特に、低周波数域での振動に対し、整定判定のマージンが大きくなる。このため、低周波数域での振動があっても、整定判定条件を外れていると判定することを、より少なくでき、動作(例えば、リード/ライト動作)を継続できる。
(もっと読む)
51 - 60 / 131
[ Back to top ]