
国際特許分類[H02P25/08]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機の種別または構造的な細部に特徴を有する交流電動機の制御装置または制御方法 (661) | 電動機の種類に特徴のあるもの (646) | リラクタンスモータ (134)
国際特許分類[H02P25/08]に分類される特許
1 - 10 / 134
モータ制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
回転力発生装置
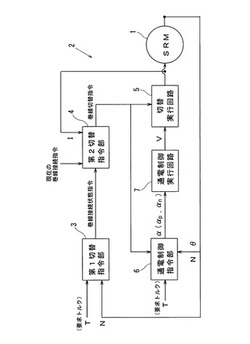
【課題】相巻線における巻線の接続状態を切り替えても、トルク波形の変動が生じない回転力発生装置を提供する。
【解決手段】トルクTと回転数Nを用いて相巻線の「直列接続→並列接続」または「並列接続→直列接続」の切替えを実施する際に、相巻線の通電状態が非通電のタイミングで切替えを実施するとともに、相巻線の電流波形を制御して切替え直前と直後のトルク波形を略同一波形に揃える。これにより、SRモータ1は、広い運転領域において高出力を得ることができるとともに、相巻線の通電中に巻線組の切替えが実施されることで生じるトルク変動を回避でき、さらに、巻線組の切替えが行われて巻線組のインダクタンスが変化することによるトルク波形の変動も回避することができる。
(もっと読む)
モータ装置

【課題】全節巻型リラクタンスモータにおいて相互インダクタンスによる影響を低減することを目的とする。
【解決手段】モータ装置では、第1の相コイル(A相コイル)と第2の相コイル(C相コイル)とに通電した状態から、第3の相コイル(B相コイル)と第1の相コイル(A相コイル)とに通電した状態へ切替える際に、第2の相コイル(C相コイル)の電流減少開始のタイミングと第3の相コイル(B相コイル)の電流増加開始のタイミングとをずらすように通電制御する。これによれば、第2の相コイル(C相コイル)に生じるトルクに寄与しない電流成分を低減することができる。すなわち、相互インダクタンスによる影響を低減することができる。
(もっと読む)
スイッチドリラクタンスモータの駆動装置及びその方法
【課題】本発明は、スイッチドリラクタンスモータの駆動装置及びその方法に関する。
【解決手段】本発明によると、電源部と、N対のコイルと、前記N対のコイルのそれぞれのコイル上部に直列連結されたN個の共通スイッチ素子と、前記N対のコイルのそれぞれのコイル下部に直列連結されたN対の下位スイッチ素子と、第1フリーホイールダイオードと、第2フリーホイールダイオードと、前記N個の共通スイッチ素子及びN対の下位スイッチ素子に制御信号を提供して、N対のコイルに順に電流が供給されるようにするスイッチ駆動部と、を含むスイッチドリラクタンスモータの駆動装置及びその方法が提供される。
(もっと読む)
スイッチドリラクタンスモータの駆動装置及びその方法
【課題】本発明は、スイッチドリラクタンスモータの駆動装置及びその方法に関する。
【解決手段】本発明は、電源部と、N対のコイルと、前記N対のコイルそれぞれのコイルの上部に直列連結されたN対の上位スイッチ素子と、前記N対のコイルそれぞれのコイルの下部に直列連結されたN対の下位スイッチ素子と、2N個の第1フリーホイールダイオードと、2N個の第2フリーホイールダイオードと、前記N対の上位スイッチ素子とN対の下位スイッチ素子に制御信号を提供してN対のコイルに順に電流が供給されるようにするスイッチ駆動部と、を含むスイッチドリラクタンスモータの駆動装置とその方法を提供する。
(もっと読む)
SRモータ用制御装置
【課題】SRモータに制御電流を供給する各ハーフブリッジ回路の使用特性を考慮した上で、各ハーフブリッジ回路をパワーモジュールに実装することを目的とする。
【解決手段】
SRモータ用制御装置1は、スター結線されたSRモータのU相、V相およびW相コイル(U,V,W)、ならびに各コイルの中性点Nにそれぞれ接続されるとともに、電源の正極および負極に接続されSRモータMの各コイル(U,V,W)に制御電流を供給するスイッチ回路30が実装されたスイッチ装置40を備える。
スイッチ回路30は、第1から第4のハーフブリッジ回路(2〜5)より構成され、スイッチ装置40は、第1から第4のハーフブリッジ回路(2〜5)のうち第1のハーフブリッジ回路2が独立して実装された第1のパワーモジュール110を備えていることを特徴とする。
(もっと読む)
リラクタンス型同期電動機の制御装置
【課題】電動機回転子の磁気的な構造および材質の磁気特性に起因する電流−トルクの非線形領域を回避できる安定した制御性を持つ制御装置を提供する。
【解決手段】
制御装置は、上位制御装置から指令されるトルク指令値に比例するq軸電流振幅値を演算するq軸電流演算部と、前記トルク指令値に比例するd軸電流振幅値を演算するd軸電流演算部と、回転子速度に応じて変化するq軸電流係数、d軸電流係数をそれぞれ演算する速度係数演算部と、q軸電流振幅値とq軸電流係数、d軸電流振幅値とd軸電流係数をそれぞれ乗じることでq軸電流指令値およびd軸電流指令値とを算出し、d軸電流指令値に基づいた三角形補償関数又は台形補償関数によりq軸電流補償値を演算するq軸電流補償値演算部と、算出されたq軸電流補償値をq軸電流指令値に加算した補償後q軸電流指令値を出力する出力部と、を備える。
(もっと読む)
駆動装置
【課題】ロータの回転を機械的に停止させて基準位置を求める突当学習時の突当トルクの精度を高める。
【解決手段】通電開始時にロータが回転する状態で電動モータを通電して励磁相の飽和電流値を検出し、検出した飽和電流値に応じて突当学習の実行時のデューティ比を算出して、突当学習を実施する際における電動モータの出力を「予め設定した目標トルク」に低減させる。これにより、諸条件により電動モータの電流の流れ易さが変化しても、突当トルクを目標トルクにコントロールすることができ、突当トルクの精度を高めることができる。突当トルクが与えられる電動アクチュエータの出力系や、パーキング切替機構のディテント機構等の機械的な負担の変動を抑えることができ、シフトバイワイヤ(パーキングバイワイヤ)の耐久性を高めることができる。
(もっと読む)
モータ制御装置
【課題】単相のエンコーダ信号によって三相スイッチング制御を実行する。
【解決手段】エンコーダ8は、二相のエンコーダ信号PA、PBを出力する。二相制御手段17は、両方のエンコーダ信号PA、PBに同期して励磁相を切換える。ひとつのエンコーダ信号だけが失われると、単相制御手段18によってモータ7が制御される。単相制御手段18は、失われたエンコーダ信号に代わって切換時期を推定する推定手段23を備える。単相制御手段18は、初期にオープン制御手段25によるオープン制御を実行する。オープン制御によってモータ7の回転が安定すると、単相フィードバック制御手段24による制御へ移行する。単相フィードバック制御手段24は、正常なエンコーダ信号と、推定された切換時期との両方に応答して励磁相を切換える。この結果、単相だけでもモータ7の制御が実行される。
(もっと読む)
モータ制御装置
【課題】基準位置を設定する壁当て制御の回数を抑制する。
【解決手段】壁当て制御手段23は、マニュアルレバー4をP壁5に押し付けることによってモータ7を制御するための基準位置を設定する。壁当て制御は、初期化条件の成立に応答して実行される。初期化条件は、電源スイッチ31のオン操作、および外部電源33の接続である。禁止手段は、初期化条件が非成立となってから、利用者が車両10から所定の閾値Dthを越えて離れるまで、初期化条件が再び成立しても、壁当て制御を禁止する。この結果、再度の壁当て制御を回避することができる。
(もっと読む)
1 - 10 / 134
[ Back to top ]