
国際特許分類[H02P29/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機および直流電動機双方に適した調整装置または制御装置 (2,020)
国際特許分類[H02P29/00]の下位に属する分類
電源を自動遮断することなく,過負荷に対する保護をするもの,例.監視 (218)
別個の制動機によるもの (1)
国際特許分類[H02P29/00]に分類される特許
101 - 110 / 1,801
建設機械
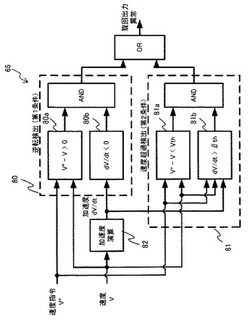
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
電動パワーステアリング装置

【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
モータ駆動制御装置
【課題】共有メモリに調整用データとモニタデータとをこの順に排他的に保存する場合にユーザに特別な操作を要求することなく、自動的に共有メモリへの保存データの切り替えが行えるモータ駆動制御装置を得ること。
【解決手段】データ入出力装置10を用いた制御機能の調整設定時において、スイッチ7に調整用データ取得部5aの出力端と共有メモリ8のデータ入力端とを接続させ、その後、データ入出力装置10が出力する制御機能の調整設定の完了通知に応答してスイッチ7にモニタデータ取得部6の出力端と共有メモリ8のデータ入力端とを接続させるスイッチ切替信号17を発生する手段を備えた。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
記録装置及びロール紙搬送の制御方法
【課題】比較的回路規模の小さな構成で、モータドライバに発生する電流値の最大電流値と安定性を両立した電流指定型のモータ駆動回路を実現することである。
【解決手段】電流制御部に対し、PWM駆動信号のPWM周期とPWM追従量が動作中にも変更可能なハードウェア機能を備え、ファームウェアを用いてPWM周期とPWM追従量を変更して、モータ駆動回路に与えるPWM駆動信号を調整する。また、給紙モータに供給される電流値を測定し、これを目標電流値と比較し、その比較結果からPWM駆動信号を調整する。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モータ駆動装置の状態表示装置
【課題】セグメント表示器の個数の増大を抑制しつつ、セグメント表示器に表示されるモータ駆動装置の状態の数を増やすことが可能なモータ駆動装置の状態表示装置を提供する。
【解決手段】異常判定手段8はモータ駆動装置7の異常を判定し、異常パターン出力部9は、モータ駆動装置7の異常の種類に応じた文字や記号を7セグメント表示器11に表示させるとともに、異常レベル出力部10は、モータ駆動装置7の異常の程度に応じて7セグメント表示器11に表示されている文字や記号を点滅させるように指示することで、1個のセグメント表示器11に文字や記号を割り当てた上で点滅パターンも割り当てるようにする。
(もっと読む)
電気推進システムにおける電動機制御方法
【課題】蓄電池とこの蓄電池を充電する発電機からなるハイブリッド電源を備えた電気推進システムにおいて、蓄電池電圧,電動機受電端電圧の異常低下を簡単かつ低コストに防止する。
【解決手段】電動機(M)6の入力電圧VMを検出器(VD)9により検出し、これが予め設定された制限開始設定電圧VMAを超えたら、予め設定されている回転速度(入力電流)制限線Yをもとに、速度指令制限部13により回転速度(入力電流)制限線を超えない回転速度を求め、これをもとに回転速度を制限して電動機(M)6を運転することで、掲記課題を装置の小型化,軽量化およびコストダウンにより実現する。
(もっと読む)
位置検出装置及びサーボモータ
【課題】アクチュエータ毎に補正データを記憶するメモリを備える必要のない位置検出装置を提供する。
【解決手段】レゾルバ2がモータ1の回転位置情報を電気信号として出力し、その電気信号を電気ケーブル3で位置検出装置4のレゾルバデジタルコンバータ6に伝送し、レゾルバデジタルコンバータ6は電気信号からモータ1の回転位置情報を検出し、メモリ7に記憶されている電気ケーブルの情報に基づいて、演算装置8が検出されたモータ1の回転位置情報を補正することにより、レゾルバ2が設けられるモータ1毎に補正データを記憶するメモリを備える必要がない。また、電気ケーブル3の長さに対するインピーダンスの差による精度誤差情報を電気ケーブルの情報として記憶することにより、レゾルバ2で検出されるモータ1の回転位置の位置情報を正確に補正することが可能となる。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
101 - 110 / 1,801
[ Back to top ]