
垂直多関節ロボット
【課題】基端側アームの内部に設けられたタイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を簡単に実施可能な垂直多関節ロボットを提供する。
【解決手段】垂直多関節ロボット10は、互いに間隔を空けて配置された一対の基端側アーム体22a、22bを有する基端側アーム22と、基端側アーム22に対して回動自在に取り付けられた先端側アーム23とを備えている。一対の基端側アーム体22a、22bの間に筒状のリンク部材30が設けられ、リンク部材30の両端部に、フランジ40a、40bがリンク部材30に対して取外し可能に装着されている。各フランジ40a、40bは、対応する基端側アーム体22a、22bに対して取外し可能に連結され、各フランジ40a、40bは、複数の分割されたフランジ部材44a〜44dから構成されている。
【解決手段】垂直多関節ロボット10は、互いに間隔を空けて配置された一対の基端側アーム体22a、22bを有する基端側アーム22と、基端側アーム22に対して回動自在に取り付けられた先端側アーム23とを備えている。一対の基端側アーム体22a、22bの間に筒状のリンク部材30が設けられ、リンク部材30の両端部に、フランジ40a、40bがリンク部材30に対して取外し可能に装着されている。各フランジ40a、40bは、対応する基端側アーム体22a、22bに対して取外し可能に連結され、各フランジ40a、40bは、複数の分割されたフランジ部材44a〜44dから構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のアームを有する垂直多関節ロボットに関する。
【背景技術】
【0002】
従来より、垂直多関節ロボットの先端に例えばスプレーガン等のエンドエフェクタを取り付け、この垂直多関節ロボットを動作させることにより、ワークに対して塗装等の作業を施すことが行われている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−120148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、このような垂直多関節ロボットにおいては、垂直多関節アームの内部に、回転軸を回転させるタイミングベルトやプーリが設けられている。このタイミングベルトやプーリを目視で確認することが行われている。また、タイミングベルトやプーリに歯とびや原点ズレ等の問題が生じていないかを確認するため、タイミングベルトとプーリにマーカーでチェックマーク(合いマーク)を施し、定期点検や塗装ロボット調整時にチェックマークのずれの有無を確認することも行われている。
【0005】
しかしながら、上述したように、タイミングベルトやプーリは垂直多関節アームの内部に設けられている。したがって、従来の垂直多関節ロボットにおいては、タイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を行う場合、アーム自体を分解するなど、大掛かりな作業が必要となっており、作業の負担が非常に大きくなっている。
【0006】
本発明はこのような点を考慮してなされたものであり、基端側アームの内部に設けられたタイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を簡単に実施することが可能な垂直多関節ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、垂直多関節ロボットにおいて、互いに間隔を空けて配置された一対の基端側アーム体を有する基端側アームと、前記基端側アームの先端に、前記基端側アームに対して回動自在に取り付けられた先端側アームとを備え、前記一対の基端側アーム体の間に筒状のリンク部材が設けられ、前記リンク部材の両端部に、それぞれフランジが前記リンク部材に対して取外し可能に装着され、各前記フランジは、それぞれ対応する前記基端側アーム体に対して取外し可能に連結され、各前記フランジは、それぞれ複数の分割されたフランジ部材から構成されていることを特徴とする垂直多関節ロボットである。
【0008】
本発明は、前記先端側アームは、各前記基端側アーム体に対して回動自在に設けられた一対の先端側アーム体を有し、前記一対の先端側アーム体は、軸部材により互いに固定連結され、前記軸部材は、前記リンク部材内に挿通されていることを特徴とする垂直多関節ロボットである。
【0009】
本発明は、前記軸部材にプーリが連結され、前記プーリに、前記軸部材を回転させるタイミングベルトが巻装され、前記プーリは、前記基端側アーム体の内部に配置されていることを特徴とする垂直多関節ロボットである。
【0010】
本発明は、前記リンク部材は、リンク本体と、前記リンク本体の両端部にそれぞれ設けられたリンクフランジとを有することを特徴とする垂直多関節ロボットである。
【0011】
本発明は、前記フランジの外面に段部が形成され、前記リンクフランジは、それぞれ前記フランジの前記段部に嵌合されることを特徴とする垂直多関節ロボットである。
【0012】
本発明は、各前記フランジは、前記基端側アーム体および前記リンクフランジに対して、それぞれ締結手段により螺着されることを特徴とする垂直多関節ロボットである。
【0013】
本発明は、各前記締結手段は、前記一対の基端側アーム体の間から前記フランジに対して挿入されることを特徴とする垂直多関節ロボットである。
【発明の効果】
【0014】
本発明によれば、フランジがリンク部材に対して取外し可能に装着され、各フランジは、それぞれ対応する基端側アーム体に対して取外し可能に連結され、各フランジは、それぞれ複数の分割されたフランジ部材から構成される。このことにより、基端側アーム体内部を容易に確認することができ、タイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を簡単に実施することができる。
【図面の簡単な説明】
【0015】
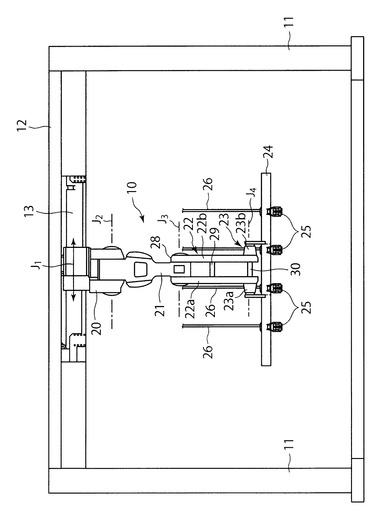
【図1】本発明の一実施の形態による垂直多関節ロボットを示す正面図。
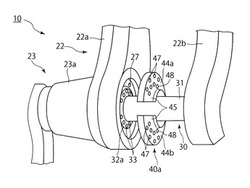
【図2】本発明の一実施の形態による垂直多関節ロボットの第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
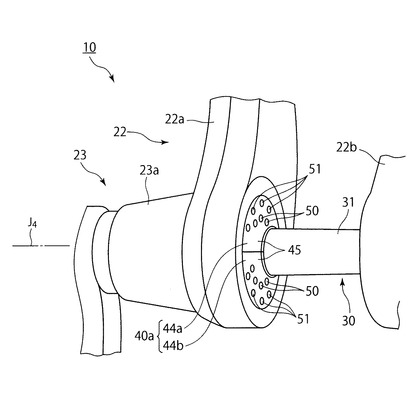
【図3】本発明の一実施の形態による垂直多関節ロボットのリンク部材およびフランジを示す分解斜視図。
【図4】本発明の一実施の形態による垂直多関節ロボットの第2アーム(基端側アーム)および第3アーム(先端側アーム)を示す断面図。
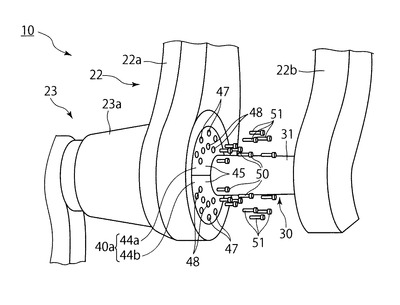
【図5】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図6】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図7】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す正面図。
【図8】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図9】比較例による垂直多関節ロボットのリンク部材およびフランジを示す分解断面図。
【発明を実施するための形態】
【0016】
以下、本発明の一実施の形態について、図1乃至図8を参照して説明する。図1乃至図8は、本発明の一実施の形態を示す図である。
【0017】
まず、図1乃至図4により、本発明の一実施の形態による垂直多関節ロボットの構成について説明する。以下において、垂直多関節ロボットとして、対象物に対して塗装を施すための塗装ロボットを例にとって説明するが、垂直多関節ロボットとしては塗装ロボットに限定されるものではなく、例えば搬送ロボットや組み立てロボットであっても良い。
【0018】
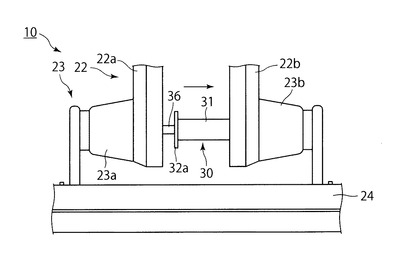
はじめに、図1により、垂直多関節ロボットの全体構成について説明する。図1に示すように、本実施の形態による垂直多関節ロボット10は、上方に位置するベース部20と、ベース部20に回動自在に取り付けられた第1アーム21と、第1アーム21の先端に、第1アーム21に対して回動自在に取り付けられた第2アーム22と、第2アーム22の先端に、第2アーム22に対して回動自在に取り付けられた第3アーム23とを備えている。この場合、第2アーム22が基端側アームに対応し、第3アーム23が先端側アームに対応する。
【0019】
第3アーム23の先端には、細長い棒状のブラケット24が第3アーム23に対して垂直に固定されている。ブラケット24には、複数(図1では4つ)のスプレーガン25が所定間隔を空けて取り付けられており、各スプレーガン25には、それぞれホース26が接続されている。なお、スプレーガン25には、ホース26として例えば塗料を供給する塗料用ホースやエアを供給するエア用ホースが接続されているが、図1では便宜上、1つのスプレーガン25に対して1つのホース26のみを表示している。
【0020】
また、床面には一対の支柱11が垂設され、一対の支柱11上方に支持梁12が架け渡されている。さらに、支持梁12には、支持梁12の長手方向に沿ってレール13が固定されており、上述したベース部20は、レール13に沿って水平移動可能となっている。このようにレール13に沿ってベース部20を水平移動させる移動軸を第1軸J1という。
【0021】
さらに、第1アーム21をベース部20に対して回動させる回動軸を第2軸J2といい、第2アーム22を第1アーム21に対して回動させる回動軸を第3軸J3といい、第3アーム23を第2アーム22に対して回動させる回動軸を第4軸J4という。これら第2軸J2と第3軸J3と第4軸J4とは、互いに平行に配置されている。
【0022】
図1に示すように、第2アーム22は、互いに間隔を空けて平行に配置された一対の基端側アーム体22a、22bを有している。また、第3アーム23は、各基端側アーム体22a、22bに対して回動自在に設けられた一対の先端側アーム体23a、23bを有している。すなわち、一方の先端側アーム体23aは、一方の基端側アーム体22aの外側先端に設けられ、他方の先端側アーム体23bは、他方の基端側アーム体22bの外側先端に設けられている。
【0023】
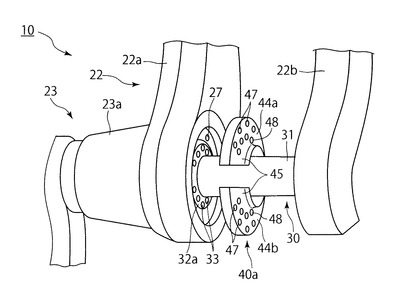
図1乃至図3に示すように、一対の基端側アーム体22a、22bの間に、筒状のリンク部材30が設けられている。リンク部材30は、基端側アーム体22a、22bに対して直交する方向に延びている。
【0024】
図3に示すように、リンク部材30は、中空円筒状のリンク本体31と、リンク本体31の両端部にそれぞれ設けられたリンクフランジ32a、32bとを有している。リンクフランジ32a、32bは、それぞれ円環形状を有しており、リンク本体31から径方向外方に突出している。これらリンク本体31およびリンクフランジ32a、32bは、一体に形成された削り出し部品等の金属部材からなっていても良い。
【0025】
図3に示すように、リンク部材30の両端部には、それぞれ円形状を有するフランジ40a、40bがリンク部材30に対して取外し可能に装着されている。また、各フランジ40a、40bの外面41a、41b(すなわち基端側アーム体22a、22b側を向く面)に、内方に凹む円環形状の段部42a、42bが形成されている。
【0026】
そしてリンク部材30のリンクフランジ32a、32bは、それぞれフランジ40a、40bの段部42a、42bに嵌合されるようになっている。なお、このようにリンクフランジ32a、32bが段部42a、42bに嵌合されたとき、各フランジ40a、40bの外面41a、41bと、リンクフランジ32a、32bの外面34a、34bとが、略同一平面上に並ぶようになっている。
【0027】
また、各フランジ40a、40bは、それぞれ複数の分割されたフランジ部材44a、44b、44c、44dから構成されている。すなわち一方(左側)のフランジ40aは、分割された2つの半円形状のフランジ部材44a、44bから構成されており、他方(右側)のフランジ40bは、分割された2つの半円形状のフランジ部材44c、44dから構成されている。なお、本実施の形態において、フランジ部材44a〜44dは、互いに同一形状の部材からなっている。
【0028】
各フランジ部材44a〜44dは、それぞれ内方に突出する突起部45を有するとともに、リンク部材30のリンク本体31の外面に対応する半円状の中心面46を有している。
【0029】
さらに、各リンクフランジ32a、32bには、複数のボルト用の貫通孔33が形成され、各フランジ部材44a〜44dには、複数のボルト用の貫通孔47、48が形成されている。なお、貫通孔48は、貫通孔47より径方向内側に位置している。
【0030】
この場合、各フランジ40a、40bは、各リンクフランジ32a、32bに対してボルト50(締結手段)により螺着される。すなわち、各ボルト50が、一対の基端側アーム体22a、22bの間から、各フランジ40a、40bの貫通孔48に挿入されて、各リンクフランジ32a、32bの貫通孔33に螺着される。これにより、各フランジ部材44a〜44dと、各リンクフランジ32a、32bとが取外し可能に連結される。なお、ボルト50は、各フランジ40a、40bに対して10本ずつ、計20本用いられる。
【0031】
また、各フランジ40a、40bは、各基端側アーム体22a、22bに対してボルト51(締結手段)により螺着される。すなわち、各ボルト51が、一対の基端側アーム体22a、22bの間から、各フランジ40a、40bの貫通孔47に挿入されて、基端側アーム体22a、22bの各取付孔27(図6参照)に螺着される。これにより、各フランジ部材44a〜44dと、各基端側アーム体22a、22bとが取外し可能に連結される。なお、ボルト51は、各フランジ40a、40bに対して10本ずつ、計20本用いられる。
【0032】
このように、リンク部材30は、フランジ40a、40bを介して基端側アーム体22a、22bに連結されている。したがって、フランジ40a、40bを基端側アーム体22a、22bおよびリンク部材30から取り外した場合、リンク部材30も基端側アーム体22a、22bから取り外される。
【0033】
次に、図4により、垂直多関節ロボット10の第2アーム22および第3アーム23の内部構成について説明する。図4は、本実施の形態による垂直多関節ロボット10の第2アーム22および第3アーム23を示す断面図である。以下においては、とりわけ第3軸J3および第4軸J4を回動させるための構成を中心として説明する。
【0034】
図4に示すように、第1アーム21と第2アーム22とを連結する関節部には、収納部28が設けられている。収納部28のうち基端側アーム体22a側には、第3軸用減速機55が設けられており、第3軸用減速機55の入力軸には、プーリ56が取り付けられている。プーリ56には、タイミングベルト57が巻き掛けられている。
【0035】
そして図示しない第3軸用モータからの動力は、タイミングベルト57およびプーリ56を順次介して第3軸用減速機55に伝えられ、第3軸用減速機55の出力軸に連結された第2アーム22が第3軸J3の周りに回動するようになっている。一方、収納部28のうち基端側アーム体22b側には、第2アーム22の回転を支持する軸受58が設けられている。
【0036】
また、収納部28内において、第3軸用減速機55には、第3軸用減速機55と同軸上に伝動軸61が貫通している。この伝動軸61の一端部にはプーリ62が取り付けられており、プーリ62にはタイミングベルト63が巻き掛けられている。さらに、伝動軸61の他端部にはプーリ64が取り付けられており、プーリ64にはタイミングベルト65が巻き掛けられている。
【0037】
一方、図4に示すように、第2アーム22と第3アーム23とを連結する関節部の先端側アーム体23a側には、第4軸用減速機71が設けられている。この第4軸用減速機71の入力軸には、プーリ72が取り付けられている。このプーリ72は、基端側アーム体22aの内部に配置されており、プーリ72には、上述したタイミングベルト65が巻き掛けられている。
【0038】
また、各先端側アーム体23a、23bは、それぞれ支持部23c、23dと、支持部23c、23dに固定された連結部23e、23fとを有している。このうち支持部23c、23dは、第4軸用減速機71の出力軸に連結されている。また、連結部23e、23fは、ブラケット24(図1参照)に連結されている。
【0039】
さらに、両方の先端側アーム体23a、23bの支持部23c、23dは、略円柱状の軸部材36により互いに固定連結されている。この軸部材36は、第4軸J4と同軸状に配置されており、リンク部材30のリンク本体31内に挿通され、かつ第4軸用減速機71内を貫通している。また、先端側アーム体23b内にフランジ67が設けられており、フランジ67は軸部材36と先端側アーム体23bとを連結している。フランジ67と軸部材36とは、例えばキー締結により連結されていても良い。
【0040】
また、軸部材36は、先端側アーム体23aの支持部23cおよび第4軸用減速機71を介して、プーリ72に連結されている。そして図示しない第4軸用モータからの動力は、タイミングベルト63、プーリ62、伝動軸61、プーリ64、タイミングベルト65およびプーリ72を順次介して第4軸用減速機71に伝えられる。さらに、動力は、第4軸用減速機71から先端側アーム体23aの支持部23c、フランジ67を順次介して先端側アーム体23bの支持部23dおよび連結部23fに伝達される。この際、第4軸用減速機71の出力軸に連結された先端側アーム体23aは、軸部材36および先端側アーム体23bと一体となって、第4軸J4の周りに回動するようになっている。
【0041】
これら第3軸用減速機55および第4軸用減速機71としては、それぞれ例えばハーモニックドライブ(登録商標)を用いることができる。
【0042】
なお、図4において、符号68は、テンショナである。また、符号29は、一対の基端側アーム体22a、22bの中央部を互いに連結する中央リンクを示している。さらに、符号69、70は、それぞれ軸部材36を支持する軸受と、軸受69用のフランジとを示している。
【0043】
次に、このような構成からなる本実施の形態の作用について、図5乃至図8を用いて説明する。具体的には、基端側アーム体22a内に配置されたタイミングベルト65やプーリ72を目視で確認したり、タイミングベルト65やプーリ72にチェックマークを施したりする作業を行う際の作用について説明する。
【0044】
まず、図5に示すように、一対の基端側アーム体22a、22bの間から、フランジ40a、40bを取り付ける全てのボルト51(締結手段)を取り外す。同様に、一対の基端側アーム体22a、22bの間から、フランジ40a、40bを取り付ける全てのボルト50(締結手段)を取り外す。なお、図5では、一方(左側)の基端側アーム体22a側のみを表示しているが、他方(右側)の基端側アーム体22bについても同様である。
【0045】
続いて、図6に示すように、フランジ部材44a〜44dを、基端側アーム体22a、22bおよびリンク部材30のリンクフランジ32a、32bからそれぞれ分割して取り外す。この場合、各フランジ部材44a〜44dを、一対の基端側アーム体22a、22bの中央方向(左右方向)およびリンク部材30の径方向外方(上下方向)に移動することにより取り外すことができる。なお、図6では、一方(左側)の基端側アーム体22a側のみを表示しているが、他方(右側)の基端側アーム体22bについても同様である。
【0046】
次に、図7に示すように、リンク部材30を基端側アーム体22bの方向(右方向)にずらす。このとき、リンク部材30は、軸部材36に沿って水平に移動し、リンクフランジ32bが基端側アーム体22b内で押し当てられて停止する。
【0047】
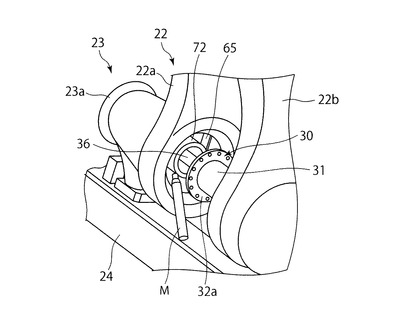
その後、図8に示すように、リンク部材30が基端側アーム体22b側にずらされた状態で、基端側アーム体22aの内部を目視で確認する。また、マーカーMを用いてタイミングベルト65やプーリ72にチェックマークを施したり、タイミングベルト65やプーリ72に付与されたチェックマークの位置を確認したりする。
【0048】
チェックマークの確認等が完了した後、上述したステップと逆のステップにより、リンク部材30およびフランジ40a、40bを基端側アーム体22a、22bに組み付ける。すなわち、まずリンク部材30を基端側アーム体22aの方向(左方向)に移動する。次いで、フランジ部材44a〜44dを、基端側アーム体22a、22bおよびリンク部材30のリンクフランジ32a、32bにそれぞれ取り付ける。この場合、一対の基端側アーム体22a、22bの間からボルト51を螺着することにより、各フランジ部材44a〜44dを各基端側アーム体22a、22bに固定する。同様に、一対の基端側アーム体22a、22bの間からボルト50を螺着することにより、各フランジ部材44a〜44dをリンク部材30の各リンクフランジ32a、32bに固定する。
【0049】
このように本実施の形態によれば、フランジ40a、40bがリンク部材30に対して取外し可能に装着され、各フランジ40a、40bは、それぞれ対応する基端側アーム体22a、22bに対して取外し可能に連結され、各フランジ40a、40bは、それぞれ複数の分割されたフランジ部材44a〜44dから構成される。このことにより、基端側アーム体22a、22bの内部の確認を容易に行うことができ、タイミングベルト65やプーリ72を目視で確認したり、タイミングベルト65やプーリ72にチェックマークを施したりする作業を簡単かつ効率的に行うことができる。
【0050】
また本実施の形態によれば、一対の先端側アーム体23a、23bは、軸部材36により互いに固定連結され、軸部材36は、リンク部材30のリンク本体31内に挿通されている。このことにより、フランジ40a、40bをリンク部材30から取り外した際、リンク部材30が軸部材36周囲に保持されるので、リンク部材30が誤って落下するおそれがない。
【0051】
また本実施の形態によれば、軸部材36は、先端側アーム体23aの支持部23cおよび第4軸用減速機71を介してプーリ72に連結されている。また、プーリ72に、軸部材36を回転させるタイミングベルト65が巻装され、プーリ72は、基端側アーム体22aの内部に配置されている。このことにより、フランジ部材44a〜44dを取り外した際、基端側アーム体22a内部のタイミングベルト65やプーリ72を容易に確認することができる。
【0052】
さらに本実施の形態によれば、リンク部材30は、リンク本体31と、リンク本体31の両端部にそれぞれ設けられたリンクフランジ32a、32bとを有する。また、フランジ40a、40bの外面41a、41bに段部42a、42bが形成され、リンクフランジ32a、32bは、それぞれフランジ40a、40bの段部42a、42bに嵌合される。このことにより、フランジ40a、40bをリンク部材30に対して確実に位置決めすることができる。
【0053】
さらに本実施の形態によれば、フランジ40a、40bは、基端側アーム体22a、22bおよびリンクフランジ32a、32bに対して、それぞれボルト51、50(締結手段)により螺着される。またボルト51、50は、一対の基端側アーム体22a、22bの間からフランジ40a、40bに対して挿入される。このことにより、第2アーム22および第3アーム23をばらすことなく、容易にフランジ40a、40bを取り外すことができる。
【0054】
なお、上述した実施の形態においては、本発明の要旨の範囲内で種々の変形が可能である。
【0055】
すなわち本実施の形態においては、各フランジ40a、40bは、それぞれ分割された2つのフランジ部材44a、44bから構成されている。しかしながら、これに限られるものではなく、例えば、各フランジ40a、40bは、それぞれ分割された3つ以上のフランジ部材から構成されていてもよい。
【0056】
また本実施の形態においては、垂直多関節ロボット10は、第1軸J1〜第4軸J4からなる4軸ロボットを例にとって説明したが、必ずしもこのような構造とする必要はない。例えば、垂直多関節ロボット10が3軸、5軸、6軸等のロボットからなっていても良い。
【0057】
比較例
ここで比較例による垂直多関節ロボットの一例について説明する。図9は比較例による垂直多関節ロボットのリンク部材およびフランジを示す分解断面図である。図9に示す比較例は、基端側アーム体22a、22bが、リンク部材91およびフランジ92a、92bを一体化したリンク90によって連結されている点が異なるものであり、他の構成は上述した実施の形態と略同一である。図9において、図1乃至図8に示す実施の形態と同一部分には同一の符号を付して詳細な説明は省略する。
【0058】
図9において、基端側アーム体22a、22bの間にリンク90が設けられている。この場合、リンク90は、一体化されたリンク部材91およびフランジ92a、92bを有している(すなわち、フランジ92a、92bはリンク部材91に対して取外し可能となっていない)。リンク90は、フランジ92a、92b内に挿通されたボルト93を用いて、基端側アーム体22a、22bに直接連結されている。
【0059】
しかしながら、図9に示す垂直多関節ロボットにおいては、例えば基端側アーム体内部のタイミングベルト65やプーリ72を目視で確認する場合、他方(右側)の先端側アーム体23bの連結部23fと支持部23dとをそれぞれ取り外すとともに、他方(右側)の基端側アーム体22bおよびリンク90を、一方(左側)の基端側アーム体22aから取り外す必要がある(図9参照)。このような作業は、非常に大掛かりであり、作業の負担が重いものである。
【0060】
これに対して本発明によれば、上述のようにタイミングベルト65やプーリ72を目視で確認したり、タイミングベルト65やプーリ72にチェックマークを施したりする作業を簡単に行うことができる。
【符号の説明】
【0061】
10 垂直多関節ロボット
20 ベース部
21 第1アーム
22 第2アーム
22a、22b 基端側アーム体
23 第3アーム
23a、23b 先端側アーム体
23c、23d 支持部
23e、23f 連結部
24 ブラケット
25 スプレーガン
26 ホース
28 収納部
30 リンク部材
31 リンク本体
32a、32b リンクフランジ
36 軸部材
40a、40b フランジ
41a、41b 外面
42a、42b 段部
44a〜44d フランジ部材
50 ボルト(締結手段)
51 ボルト(締結手段)
【技術分野】
【0001】
本発明は、複数のアームを有する垂直多関節ロボットに関する。
【背景技術】
【0002】
従来より、垂直多関節ロボットの先端に例えばスプレーガン等のエンドエフェクタを取り付け、この垂直多関節ロボットを動作させることにより、ワークに対して塗装等の作業を施すことが行われている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−120148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、このような垂直多関節ロボットにおいては、垂直多関節アームの内部に、回転軸を回転させるタイミングベルトやプーリが設けられている。このタイミングベルトやプーリを目視で確認することが行われている。また、タイミングベルトやプーリに歯とびや原点ズレ等の問題が生じていないかを確認するため、タイミングベルトとプーリにマーカーでチェックマーク(合いマーク)を施し、定期点検や塗装ロボット調整時にチェックマークのずれの有無を確認することも行われている。
【0005】
しかしながら、上述したように、タイミングベルトやプーリは垂直多関節アームの内部に設けられている。したがって、従来の垂直多関節ロボットにおいては、タイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を行う場合、アーム自体を分解するなど、大掛かりな作業が必要となっており、作業の負担が非常に大きくなっている。
【0006】
本発明はこのような点を考慮してなされたものであり、基端側アームの内部に設けられたタイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を簡単に実施することが可能な垂直多関節ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、垂直多関節ロボットにおいて、互いに間隔を空けて配置された一対の基端側アーム体を有する基端側アームと、前記基端側アームの先端に、前記基端側アームに対して回動自在に取り付けられた先端側アームとを備え、前記一対の基端側アーム体の間に筒状のリンク部材が設けられ、前記リンク部材の両端部に、それぞれフランジが前記リンク部材に対して取外し可能に装着され、各前記フランジは、それぞれ対応する前記基端側アーム体に対して取外し可能に連結され、各前記フランジは、それぞれ複数の分割されたフランジ部材から構成されていることを特徴とする垂直多関節ロボットである。
【0008】
本発明は、前記先端側アームは、各前記基端側アーム体に対して回動自在に設けられた一対の先端側アーム体を有し、前記一対の先端側アーム体は、軸部材により互いに固定連結され、前記軸部材は、前記リンク部材内に挿通されていることを特徴とする垂直多関節ロボットである。
【0009】
本発明は、前記軸部材にプーリが連結され、前記プーリに、前記軸部材を回転させるタイミングベルトが巻装され、前記プーリは、前記基端側アーム体の内部に配置されていることを特徴とする垂直多関節ロボットである。
【0010】
本発明は、前記リンク部材は、リンク本体と、前記リンク本体の両端部にそれぞれ設けられたリンクフランジとを有することを特徴とする垂直多関節ロボットである。
【0011】
本発明は、前記フランジの外面に段部が形成され、前記リンクフランジは、それぞれ前記フランジの前記段部に嵌合されることを特徴とする垂直多関節ロボットである。
【0012】
本発明は、各前記フランジは、前記基端側アーム体および前記リンクフランジに対して、それぞれ締結手段により螺着されることを特徴とする垂直多関節ロボットである。
【0013】
本発明は、各前記締結手段は、前記一対の基端側アーム体の間から前記フランジに対して挿入されることを特徴とする垂直多関節ロボットである。
【発明の効果】
【0014】
本発明によれば、フランジがリンク部材に対して取外し可能に装着され、各フランジは、それぞれ対応する基端側アーム体に対して取外し可能に連結され、各フランジは、それぞれ複数の分割されたフランジ部材から構成される。このことにより、基端側アーム体内部を容易に確認することができ、タイミングベルトやプーリを目視で確認したり、タイミングベルトやプーリにチェックマークを施したりする作業を簡単に実施することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態による垂直多関節ロボットを示す正面図。
【図2】本発明の一実施の形態による垂直多関節ロボットの第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図3】本発明の一実施の形態による垂直多関節ロボットのリンク部材およびフランジを示す分解斜視図。
【図4】本発明の一実施の形態による垂直多関節ロボットの第2アーム(基端側アーム)および第3アーム(先端側アーム)を示す断面図。
【図5】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図6】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図7】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す正面図。
【図8】本発明の一実施の形態による垂直多関節ロボットの作用を示す図であって、第2アーム(基端側アーム)と第3アーム(先端側アーム)とを連結する関節部周辺を示す斜視図。
【図9】比較例による垂直多関節ロボットのリンク部材およびフランジを示す分解断面図。
【発明を実施するための形態】
【0016】
以下、本発明の一実施の形態について、図1乃至図8を参照して説明する。図1乃至図8は、本発明の一実施の形態を示す図である。
【0017】
まず、図1乃至図4により、本発明の一実施の形態による垂直多関節ロボットの構成について説明する。以下において、垂直多関節ロボットとして、対象物に対して塗装を施すための塗装ロボットを例にとって説明するが、垂直多関節ロボットとしては塗装ロボットに限定されるものではなく、例えば搬送ロボットや組み立てロボットであっても良い。
【0018】
はじめに、図1により、垂直多関節ロボットの全体構成について説明する。図1に示すように、本実施の形態による垂直多関節ロボット10は、上方に位置するベース部20と、ベース部20に回動自在に取り付けられた第1アーム21と、第1アーム21の先端に、第1アーム21に対して回動自在に取り付けられた第2アーム22と、第2アーム22の先端に、第2アーム22に対して回動自在に取り付けられた第3アーム23とを備えている。この場合、第2アーム22が基端側アームに対応し、第3アーム23が先端側アームに対応する。
【0019】
第3アーム23の先端には、細長い棒状のブラケット24が第3アーム23に対して垂直に固定されている。ブラケット24には、複数(図1では4つ)のスプレーガン25が所定間隔を空けて取り付けられており、各スプレーガン25には、それぞれホース26が接続されている。なお、スプレーガン25には、ホース26として例えば塗料を供給する塗料用ホースやエアを供給するエア用ホースが接続されているが、図1では便宜上、1つのスプレーガン25に対して1つのホース26のみを表示している。
【0020】
また、床面には一対の支柱11が垂設され、一対の支柱11上方に支持梁12が架け渡されている。さらに、支持梁12には、支持梁12の長手方向に沿ってレール13が固定されており、上述したベース部20は、レール13に沿って水平移動可能となっている。このようにレール13に沿ってベース部20を水平移動させる移動軸を第1軸J1という。
【0021】
さらに、第1アーム21をベース部20に対して回動させる回動軸を第2軸J2といい、第2アーム22を第1アーム21に対して回動させる回動軸を第3軸J3といい、第3アーム23を第2アーム22に対して回動させる回動軸を第4軸J4という。これら第2軸J2と第3軸J3と第4軸J4とは、互いに平行に配置されている。
【0022】
図1に示すように、第2アーム22は、互いに間隔を空けて平行に配置された一対の基端側アーム体22a、22bを有している。また、第3アーム23は、各基端側アーム体22a、22bに対して回動自在に設けられた一対の先端側アーム体23a、23bを有している。すなわち、一方の先端側アーム体23aは、一方の基端側アーム体22aの外側先端に設けられ、他方の先端側アーム体23bは、他方の基端側アーム体22bの外側先端に設けられている。
【0023】
図1乃至図3に示すように、一対の基端側アーム体22a、22bの間に、筒状のリンク部材30が設けられている。リンク部材30は、基端側アーム体22a、22bに対して直交する方向に延びている。
【0024】
図3に示すように、リンク部材30は、中空円筒状のリンク本体31と、リンク本体31の両端部にそれぞれ設けられたリンクフランジ32a、32bとを有している。リンクフランジ32a、32bは、それぞれ円環形状を有しており、リンク本体31から径方向外方に突出している。これらリンク本体31およびリンクフランジ32a、32bは、一体に形成された削り出し部品等の金属部材からなっていても良い。
【0025】
図3に示すように、リンク部材30の両端部には、それぞれ円形状を有するフランジ40a、40bがリンク部材30に対して取外し可能に装着されている。また、各フランジ40a、40bの外面41a、41b(すなわち基端側アーム体22a、22b側を向く面)に、内方に凹む円環形状の段部42a、42bが形成されている。
【0026】
そしてリンク部材30のリンクフランジ32a、32bは、それぞれフランジ40a、40bの段部42a、42bに嵌合されるようになっている。なお、このようにリンクフランジ32a、32bが段部42a、42bに嵌合されたとき、各フランジ40a、40bの外面41a、41bと、リンクフランジ32a、32bの外面34a、34bとが、略同一平面上に並ぶようになっている。
【0027】
また、各フランジ40a、40bは、それぞれ複数の分割されたフランジ部材44a、44b、44c、44dから構成されている。すなわち一方(左側)のフランジ40aは、分割された2つの半円形状のフランジ部材44a、44bから構成されており、他方(右側)のフランジ40bは、分割された2つの半円形状のフランジ部材44c、44dから構成されている。なお、本実施の形態において、フランジ部材44a〜44dは、互いに同一形状の部材からなっている。
【0028】
各フランジ部材44a〜44dは、それぞれ内方に突出する突起部45を有するとともに、リンク部材30のリンク本体31の外面に対応する半円状の中心面46を有している。
【0029】
さらに、各リンクフランジ32a、32bには、複数のボルト用の貫通孔33が形成され、各フランジ部材44a〜44dには、複数のボルト用の貫通孔47、48が形成されている。なお、貫通孔48は、貫通孔47より径方向内側に位置している。
【0030】
この場合、各フランジ40a、40bは、各リンクフランジ32a、32bに対してボルト50(締結手段)により螺着される。すなわち、各ボルト50が、一対の基端側アーム体22a、22bの間から、各フランジ40a、40bの貫通孔48に挿入されて、各リンクフランジ32a、32bの貫通孔33に螺着される。これにより、各フランジ部材44a〜44dと、各リンクフランジ32a、32bとが取外し可能に連結される。なお、ボルト50は、各フランジ40a、40bに対して10本ずつ、計20本用いられる。
【0031】
また、各フランジ40a、40bは、各基端側アーム体22a、22bに対してボルト51(締結手段)により螺着される。すなわち、各ボルト51が、一対の基端側アーム体22a、22bの間から、各フランジ40a、40bの貫通孔47に挿入されて、基端側アーム体22a、22bの各取付孔27(図6参照)に螺着される。これにより、各フランジ部材44a〜44dと、各基端側アーム体22a、22bとが取外し可能に連結される。なお、ボルト51は、各フランジ40a、40bに対して10本ずつ、計20本用いられる。
【0032】
このように、リンク部材30は、フランジ40a、40bを介して基端側アーム体22a、22bに連結されている。したがって、フランジ40a、40bを基端側アーム体22a、22bおよびリンク部材30から取り外した場合、リンク部材30も基端側アーム体22a、22bから取り外される。
【0033】
次に、図4により、垂直多関節ロボット10の第2アーム22および第3アーム23の内部構成について説明する。図4は、本実施の形態による垂直多関節ロボット10の第2アーム22および第3アーム23を示す断面図である。以下においては、とりわけ第3軸J3および第4軸J4を回動させるための構成を中心として説明する。
【0034】
図4に示すように、第1アーム21と第2アーム22とを連結する関節部には、収納部28が設けられている。収納部28のうち基端側アーム体22a側には、第3軸用減速機55が設けられており、第3軸用減速機55の入力軸には、プーリ56が取り付けられている。プーリ56には、タイミングベルト57が巻き掛けられている。
【0035】
そして図示しない第3軸用モータからの動力は、タイミングベルト57およびプーリ56を順次介して第3軸用減速機55に伝えられ、第3軸用減速機55の出力軸に連結された第2アーム22が第3軸J3の周りに回動するようになっている。一方、収納部28のうち基端側アーム体22b側には、第2アーム22の回転を支持する軸受58が設けられている。
【0036】
また、収納部28内において、第3軸用減速機55には、第3軸用減速機55と同軸上に伝動軸61が貫通している。この伝動軸61の一端部にはプーリ62が取り付けられており、プーリ62にはタイミングベルト63が巻き掛けられている。さらに、伝動軸61の他端部にはプーリ64が取り付けられており、プーリ64にはタイミングベルト65が巻き掛けられている。
【0037】
一方、図4に示すように、第2アーム22と第3アーム23とを連結する関節部の先端側アーム体23a側には、第4軸用減速機71が設けられている。この第4軸用減速機71の入力軸には、プーリ72が取り付けられている。このプーリ72は、基端側アーム体22aの内部に配置されており、プーリ72には、上述したタイミングベルト65が巻き掛けられている。
【0038】
また、各先端側アーム体23a、23bは、それぞれ支持部23c、23dと、支持部23c、23dに固定された連結部23e、23fとを有している。このうち支持部23c、23dは、第4軸用減速機71の出力軸に連結されている。また、連結部23e、23fは、ブラケット24(図1参照)に連結されている。
【0039】
さらに、両方の先端側アーム体23a、23bの支持部23c、23dは、略円柱状の軸部材36により互いに固定連結されている。この軸部材36は、第4軸J4と同軸状に配置されており、リンク部材30のリンク本体31内に挿通され、かつ第4軸用減速機71内を貫通している。また、先端側アーム体23b内にフランジ67が設けられており、フランジ67は軸部材36と先端側アーム体23bとを連結している。フランジ67と軸部材36とは、例えばキー締結により連結されていても良い。
【0040】
また、軸部材36は、先端側アーム体23aの支持部23cおよび第4軸用減速機71を介して、プーリ72に連結されている。そして図示しない第4軸用モータからの動力は、タイミングベルト63、プーリ62、伝動軸61、プーリ64、タイミングベルト65およびプーリ72を順次介して第4軸用減速機71に伝えられる。さらに、動力は、第4軸用減速機71から先端側アーム体23aの支持部23c、フランジ67を順次介して先端側アーム体23bの支持部23dおよび連結部23fに伝達される。この際、第4軸用減速機71の出力軸に連結された先端側アーム体23aは、軸部材36および先端側アーム体23bと一体となって、第4軸J4の周りに回動するようになっている。
【0041】
これら第3軸用減速機55および第4軸用減速機71としては、それぞれ例えばハーモニックドライブ(登録商標)を用いることができる。
【0042】
なお、図4において、符号68は、テンショナである。また、符号29は、一対の基端側アーム体22a、22bの中央部を互いに連結する中央リンクを示している。さらに、符号69、70は、それぞれ軸部材36を支持する軸受と、軸受69用のフランジとを示している。
【0043】
次に、このような構成からなる本実施の形態の作用について、図5乃至図8を用いて説明する。具体的には、基端側アーム体22a内に配置されたタイミングベルト65やプーリ72を目視で確認したり、タイミングベルト65やプーリ72にチェックマークを施したりする作業を行う際の作用について説明する。
【0044】
まず、図5に示すように、一対の基端側アーム体22a、22bの間から、フランジ40a、40bを取り付ける全てのボルト51(締結手段)を取り外す。同様に、一対の基端側アーム体22a、22bの間から、フランジ40a、40bを取り付ける全てのボルト50(締結手段)を取り外す。なお、図5では、一方(左側)の基端側アーム体22a側のみを表示しているが、他方(右側)の基端側アーム体22bについても同様である。
【0045】
続いて、図6に示すように、フランジ部材44a〜44dを、基端側アーム体22a、22bおよびリンク部材30のリンクフランジ32a、32bからそれぞれ分割して取り外す。この場合、各フランジ部材44a〜44dを、一対の基端側アーム体22a、22bの中央方向(左右方向)およびリンク部材30の径方向外方(上下方向)に移動することにより取り外すことができる。なお、図6では、一方(左側)の基端側アーム体22a側のみを表示しているが、他方(右側)の基端側アーム体22bについても同様である。
【0046】
次に、図7に示すように、リンク部材30を基端側アーム体22bの方向(右方向)にずらす。このとき、リンク部材30は、軸部材36に沿って水平に移動し、リンクフランジ32bが基端側アーム体22b内で押し当てられて停止する。
【0047】
その後、図8に示すように、リンク部材30が基端側アーム体22b側にずらされた状態で、基端側アーム体22aの内部を目視で確認する。また、マーカーMを用いてタイミングベルト65やプーリ72にチェックマークを施したり、タイミングベルト65やプーリ72に付与されたチェックマークの位置を確認したりする。
【0048】
チェックマークの確認等が完了した後、上述したステップと逆のステップにより、リンク部材30およびフランジ40a、40bを基端側アーム体22a、22bに組み付ける。すなわち、まずリンク部材30を基端側アーム体22aの方向(左方向)に移動する。次いで、フランジ部材44a〜44dを、基端側アーム体22a、22bおよびリンク部材30のリンクフランジ32a、32bにそれぞれ取り付ける。この場合、一対の基端側アーム体22a、22bの間からボルト51を螺着することにより、各フランジ部材44a〜44dを各基端側アーム体22a、22bに固定する。同様に、一対の基端側アーム体22a、22bの間からボルト50を螺着することにより、各フランジ部材44a〜44dをリンク部材30の各リンクフランジ32a、32bに固定する。
【0049】
このように本実施の形態によれば、フランジ40a、40bがリンク部材30に対して取外し可能に装着され、各フランジ40a、40bは、それぞれ対応する基端側アーム体22a、22bに対して取外し可能に連結され、各フランジ40a、40bは、それぞれ複数の分割されたフランジ部材44a〜44dから構成される。このことにより、基端側アーム体22a、22bの内部の確認を容易に行うことができ、タイミングベルト65やプーリ72を目視で確認したり、タイミングベルト65やプーリ72にチェックマークを施したりする作業を簡単かつ効率的に行うことができる。
【0050】
また本実施の形態によれば、一対の先端側アーム体23a、23bは、軸部材36により互いに固定連結され、軸部材36は、リンク部材30のリンク本体31内に挿通されている。このことにより、フランジ40a、40bをリンク部材30から取り外した際、リンク部材30が軸部材36周囲に保持されるので、リンク部材30が誤って落下するおそれがない。
【0051】
また本実施の形態によれば、軸部材36は、先端側アーム体23aの支持部23cおよび第4軸用減速機71を介してプーリ72に連結されている。また、プーリ72に、軸部材36を回転させるタイミングベルト65が巻装され、プーリ72は、基端側アーム体22aの内部に配置されている。このことにより、フランジ部材44a〜44dを取り外した際、基端側アーム体22a内部のタイミングベルト65やプーリ72を容易に確認することができる。
【0052】
さらに本実施の形態によれば、リンク部材30は、リンク本体31と、リンク本体31の両端部にそれぞれ設けられたリンクフランジ32a、32bとを有する。また、フランジ40a、40bの外面41a、41bに段部42a、42bが形成され、リンクフランジ32a、32bは、それぞれフランジ40a、40bの段部42a、42bに嵌合される。このことにより、フランジ40a、40bをリンク部材30に対して確実に位置決めすることができる。
【0053】
さらに本実施の形態によれば、フランジ40a、40bは、基端側アーム体22a、22bおよびリンクフランジ32a、32bに対して、それぞれボルト51、50(締結手段)により螺着される。またボルト51、50は、一対の基端側アーム体22a、22bの間からフランジ40a、40bに対して挿入される。このことにより、第2アーム22および第3アーム23をばらすことなく、容易にフランジ40a、40bを取り外すことができる。
【0054】
なお、上述した実施の形態においては、本発明の要旨の範囲内で種々の変形が可能である。
【0055】
すなわち本実施の形態においては、各フランジ40a、40bは、それぞれ分割された2つのフランジ部材44a、44bから構成されている。しかしながら、これに限られるものではなく、例えば、各フランジ40a、40bは、それぞれ分割された3つ以上のフランジ部材から構成されていてもよい。
【0056】
また本実施の形態においては、垂直多関節ロボット10は、第1軸J1〜第4軸J4からなる4軸ロボットを例にとって説明したが、必ずしもこのような構造とする必要はない。例えば、垂直多関節ロボット10が3軸、5軸、6軸等のロボットからなっていても良い。
【0057】
比較例
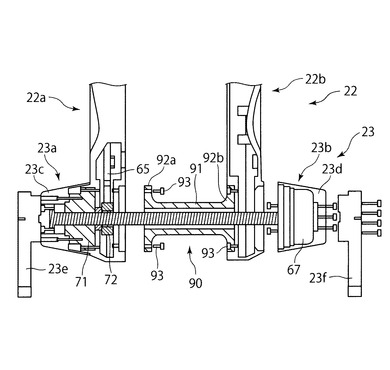
ここで比較例による垂直多関節ロボットの一例について説明する。図9は比較例による垂直多関節ロボットのリンク部材およびフランジを示す分解断面図である。図9に示す比較例は、基端側アーム体22a、22bが、リンク部材91およびフランジ92a、92bを一体化したリンク90によって連結されている点が異なるものであり、他の構成は上述した実施の形態と略同一である。図9において、図1乃至図8に示す実施の形態と同一部分には同一の符号を付して詳細な説明は省略する。
【0058】
図9において、基端側アーム体22a、22bの間にリンク90が設けられている。この場合、リンク90は、一体化されたリンク部材91およびフランジ92a、92bを有している(すなわち、フランジ92a、92bはリンク部材91に対して取外し可能となっていない)。リンク90は、フランジ92a、92b内に挿通されたボルト93を用いて、基端側アーム体22a、22bに直接連結されている。
【0059】
しかしながら、図9に示す垂直多関節ロボットにおいては、例えば基端側アーム体内部のタイミングベルト65やプーリ72を目視で確認する場合、他方(右側)の先端側アーム体23bの連結部23fと支持部23dとをそれぞれ取り外すとともに、他方(右側)の基端側アーム体22bおよびリンク90を、一方(左側)の基端側アーム体22aから取り外す必要がある(図9参照)。このような作業は、非常に大掛かりであり、作業の負担が重いものである。
【0060】
これに対して本発明によれば、上述のようにタイミングベルト65やプーリ72を目視で確認したり、タイミングベルト65やプーリ72にチェックマークを施したりする作業を簡単に行うことができる。
【符号の説明】
【0061】
10 垂直多関節ロボット
20 ベース部
21 第1アーム
22 第2アーム
22a、22b 基端側アーム体
23 第3アーム
23a、23b 先端側アーム体
23c、23d 支持部
23e、23f 連結部
24 ブラケット
25 スプレーガン
26 ホース
28 収納部
30 リンク部材
31 リンク本体
32a、32b リンクフランジ
36 軸部材
40a、40b フランジ
41a、41b 外面
42a、42b 段部
44a〜44d フランジ部材
50 ボルト(締結手段)
51 ボルト(締結手段)
【特許請求の範囲】
【請求項1】
垂直多関節ロボットにおいて、
互いに間隔を空けて配置された一対の基端側アーム体を有する基端側アームと、
前記基端側アームの先端に、前記基端側アームに対して回動自在に取り付けられた先端側アームとを備え、
前記一対の基端側アーム体の間に筒状のリンク部材が設けられ、前記リンク部材の両端部に、それぞれフランジが前記リンク部材に対して取外し可能に装着され、
各前記フランジは、それぞれ対応する前記基端側アーム体に対して取外し可能に連結され、
各前記フランジは、それぞれ複数の分割されたフランジ部材から構成されていることを特徴とする垂直多関節ロボット。
【請求項2】
前記先端側アームは、各前記基端側アーム体に対して回動自在に設けられた一対の先端側アーム体を有し、前記一対の先端側アーム体は、軸部材により互いに固定連結され、前記軸部材は、前記リンク部材内に挿通されていることを特徴とする請求項1記載の垂直多関節ロボット。
【請求項3】
前記軸部材にプーリが連結され、前記プーリに、前記軸部材を回転させるタイミングベルトが巻装され、前記プーリは、前記基端側アーム体の内部に配置されていることを特徴とする請求項2記載の垂直多関節ロボット。
【請求項4】
前記リンク部材は、リンク本体と、前記リンク本体の両端部にそれぞれ設けられたリンクフランジとを有することを特徴とする請求項1乃至3のいずれか一項記載の垂直多関節ロボット。
【請求項5】
前記フランジの外面に段部が形成され、前記リンクフランジは、それぞれ前記フランジの前記段部に嵌合されることを特徴とする請求項4記載の垂直多関節ロボット。
【請求項6】
各前記フランジは、前記基端側アーム体および前記リンクフランジに対して、それぞれ締結手段により螺着されることを特徴とする請求項4または5記載の垂直多関節ロボット。
【請求項7】
各前記締結手段は、前記一対の基端側アーム体の間から前記フランジに対して挿入されることを特徴とする請求項6記載の垂直多関節ロボット。
【請求項1】
垂直多関節ロボットにおいて、
互いに間隔を空けて配置された一対の基端側アーム体を有する基端側アームと、
前記基端側アームの先端に、前記基端側アームに対して回動自在に取り付けられた先端側アームとを備え、
前記一対の基端側アーム体の間に筒状のリンク部材が設けられ、前記リンク部材の両端部に、それぞれフランジが前記リンク部材に対して取外し可能に装着され、
各前記フランジは、それぞれ対応する前記基端側アーム体に対して取外し可能に連結され、
各前記フランジは、それぞれ複数の分割されたフランジ部材から構成されていることを特徴とする垂直多関節ロボット。
【請求項2】
前記先端側アームは、各前記基端側アーム体に対して回動自在に設けられた一対の先端側アーム体を有し、前記一対の先端側アーム体は、軸部材により互いに固定連結され、前記軸部材は、前記リンク部材内に挿通されていることを特徴とする請求項1記載の垂直多関節ロボット。
【請求項3】
前記軸部材にプーリが連結され、前記プーリに、前記軸部材を回転させるタイミングベルトが巻装され、前記プーリは、前記基端側アーム体の内部に配置されていることを特徴とする請求項2記載の垂直多関節ロボット。
【請求項4】
前記リンク部材は、リンク本体と、前記リンク本体の両端部にそれぞれ設けられたリンクフランジとを有することを特徴とする請求項1乃至3のいずれか一項記載の垂直多関節ロボット。
【請求項5】
前記フランジの外面に段部が形成され、前記リンクフランジは、それぞれ前記フランジの前記段部に嵌合されることを特徴とする請求項4記載の垂直多関節ロボット。
【請求項6】
各前記フランジは、前記基端側アーム体および前記リンクフランジに対して、それぞれ締結手段により螺着されることを特徴とする請求項4または5記載の垂直多関節ロボット。
【請求項7】
各前記締結手段は、前記一対の基端側アーム体の間から前記フランジに対して挿入されることを特徴とする請求項6記載の垂直多関節ロボット。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−240139(P2012−240139A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−110582(P2011−110582)
【出願日】平成23年5月17日(2011.5.17)
【出願人】(000003458)東芝機械株式会社 (843)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月17日(2011.5.17)
【出願人】(000003458)東芝機械株式会社 (843)
【Fターム(参考)】
[ Back to top ]