
外部情報を得られない環境における装置の方位計測方法
【課題】ジャイロ回転軸が鉛直でなく傾斜している場合において、装置の方位角を的確に計測することができる外部情報を得られない環境における装置の方位計測方法を提供する。
【解決手段】外部情報を得られない環境における装置の方位計測方法において、鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないように装置主軸の方位角を計測する。
【解決手段】外部情報を得られない環境における装置の方位計測方法において、鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないように装置主軸の方位角を計測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外部情報を得られない環境における装置の方位計測方法に関するものである。
【背景技術】
【0002】
従来の水平系掘削における位置測定法として、ターゲットが発する電磁波を用いる方法や、レーザ光等の光学的手段を用いてターゲットとの相対角度を測り、位置を算出する方法がある(下記特許文献1,2参照)。
【0003】
また、推進装置内に搭載したジャイロから得られる角度データ、推進装置の傾きを検知する傾斜計からの角度データ及び推進装置の推進距離を計測する距離計からの距離データを用いて装置の水平位置を演算する際、装置内に設置された位置計測用ターゲット板を用いて推進中の装置の水平変位を測量し、その測量データ及び同時に得られるジャイロの回転角データを用いて、推進装置の推進基線に対する初期角度を演算するようにした地中推進装置の初期角度検知方法及び位置連続検知方法が提案されている(下記特許文献3参照)。
【0004】
また、本願発明者らは、比較的小さな径を有する管などの水平系の掘削において、地中の水平方向掘削先端位置を、外部環境および作業環境の影響を受けずに的確に測定することができる、水平方向掘削先端位置の測定装置を提案した(下記特許文献4,5参照)。
【特許文献1】特開平11−023271号公報
【特許文献2】特開2002−48543号公報
【特許文献3】特開平11−107679号公報
【特許文献4】特願2004−352128号
【特許文献5】特願2004−352129号
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した従来技術では、ジャイロ回転軸が鉛直でなく傾斜している場合には、地球自転軸の方向を検出し、装置の方位角を求めることは困難であった。
【0006】
本発明は、上記状況に鑑みて、ジャイロ回転軸が鉛直でなく傾斜している場合において、装置の方位角を的確に計測することができる外部情報を得られない環境における装置の方位計測方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上記目的を達成するために、
〔1〕外部情報を得られない環境における装置の方位計測方法において、鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないように装置主軸の方位角を計測することを特徴とする。
【0008】
〔2〕上記〔1〕記載の外部情報を得られない環境における装置の方位計測方法において、
(a)光ファイバージャイロを回転テーブル上に配置し、所定角度(例えば5度毎)に回転して停止し、光ファイバージャイロの出力を多数回(1000〜1万回程度)計測して平均を求め、そのときのジャイロ回転角θと光ファイバージャイロの平均出力を記録し、
(b)上記(a)を1回転にわたって繰り返し、ジャイロ回転角度とその位置における平均ジャイロ出力を記録し、
(c)計測したジャイロ出力値から一回転にわたる平均ジャイロ出力値を差し引き、この平均値を差し引いた後の(実効値×√2)で割算して、振幅・オフセットを規格化し、
(d)前記データの点間を補間して所要の角度ピッチで規格化信号を作成し、
(e)計測ユニットの基準軸を原点とし、所要の角度ピッチでもって、360度で1周期になる余弦波を基準信号として作成し、
(f)前記基準信号と前記規格化信号の誤差2乗和を規格化信号をずらしながら演算し、前記基準信号と規格化信号との位相差である、誤差2乗和が最小となるずれ量(前記基準信号との位相差)を演算して、ジャイロ感度軸が最も地軸方向に近づく角度をθ0 とし、
(g)計測ユニットに取り付けた傾斜センサ5A,5BでX,Y軸方向の傾斜角度を測定し、測定位置における緯度は既知であるとして、装置主軸の方位角を求めることを特徴とする。
【0009】
〔3〕上記〔2〕記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における所定角度は5度程度の比較的荒いステップであることを特徴とする。
【0010】
〔4〕上記〔2〕記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における多数回は1000〜1万回程度であることを特徴とする。
【0011】
〔5〕外部情報を得られない環境における装置の方位計測方法において、光ファイバージャイロ及び傾斜計を2点間に渡したリンクの上に設置して、方位と重力加速度を基準とする姿勢角を直接的に計測し、位置の計測を行うことを特徴とする。
【0012】
〔6〕上記〔5〕記載の外部情報を得られない環境における装置の方位計測方法において、前記光ファイバージャイロ及び傾斜計を剛性の高い掘削管本体又は掘削機本体内に設置することを特徴とする。
【発明の効果】
【0013】
本発明によれば、ジャイロ回転軸が鉛直でなく傾斜している場合において、装置の方位角を的確に計測することができる。
【発明を実施するための最良の形態】
【0014】
本発明の外部情報を得られない環境における装置の方位計測方法は、鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないようにする。
【実施例】
【0015】
以下、本発明の実施の形態について詳細に説明する。
【0016】
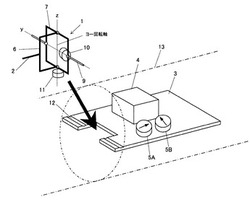
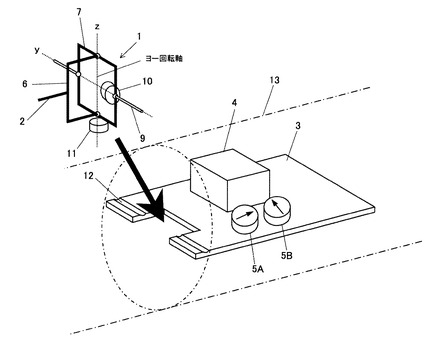
図1は本発明の実施例を示す計測ユニットの模式図である。
【0017】
この図において、1はリンク支持機構、2はリンク、2Bはリンク後端支持点、3は台、4はジャイロコンパス、5A,5Bは傾斜センサー、6は二股状のアーム、7は四角形状のリンク、8Aはリンク支点、9はピッチ回転軸(y軸)、10はピッチ回転軸9回りの回転を検出するロータリーエンコーダ、11はヨー角回転軸(z軸)回りの回転を検出するロータリーエンコーダ、12はピッチ回転軸受取付部、13はスリーブ管であり、計測ユニットはスリーブ管13内を進むことができる。また、リンク支持機構1は、台3のx,y軸回りの回転を許容している。
【0018】
図2は高精度の光ファイバージャイロの座標系を示す図、図3はその光ファイバージャイロで地球の自転軸方向を検出するための説明図である。
【0019】
これらの図において、21は回転テーブル、22はこの回転テーブル21上に搭載される光ファイバージャイロ、23はx軸(計測器の長手方向)、24はy軸、25はz軸(ジャイロ回転軸)、26は地軸、27は光ファイバージャイロ22の角速度検出軸、28は鉛直軸である。
【0020】
本発明の計測方法の実現方法について説明する。
【0021】
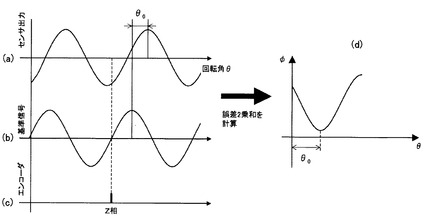
(1)光ファイバージャイロ22を回転テーブル21上に配置し、その回転テーブル21を適当な角度(例えば5度)ごとにz軸25回りに回転させて停止し、光ファイバージャイロ22の出力を多数回(1000〜1万回程度)計測して平均を求める。そのときの回転角θと光ファイバージャイロ22の出力を記録しておく〔図3(a)参照〕。
【0022】
(2)上記を1回転にわたって繰り返し、角度とその位置における平均ジャイロ出力を記録する。
【0023】
(3)上記(2)で求めた各点の平均ジャイロ出力を1回転にわたって平均し、各点の平均ジャイロ出力から差し引き、さらにこの平均値を差し引いた後の(実効値×√2)で割算して振幅・オフセットを規格化する。
【0024】
(4)上記データの点間を補間して所要の角度ピッチで規格化信号を作成する〔図3(a)参照〕。
【0025】
(5)計測器基準軸〔図3(c)参照〕を原点とし、所要の角度ピッチで、360度で1周期になるコサイン波を基準信号として作成する〔図3(b)参照〕。
【0026】
(6)基準信号と規格化信号の誤差2乗和を規格化信号をずらしながら計算し、誤差2乗和が最小となるずれ量(基準信号との位相差)を計算し、ジャイロ回転角θ〔後述の式(10)〕とする〔図3(d)参照〕。
(7)計測ユニットに取り付けた傾斜計(傾斜センサー)5A,5Bでx,y軸方向の傾斜角度を測定し、測定位置における緯度は既知であるとして、装置主軸の方位角Ψ0 〔後述の式(12)〕を計算する。
【0027】
以下、ジャイロ感度誤差の影響を受けない方位測定について詳細に説明する。
【0028】
〔座標の定義〕
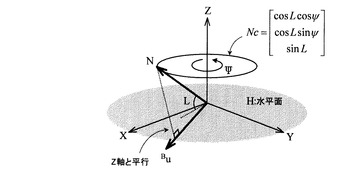
図4は座標の定義を示す図である。
【0029】
図4に示すように、任意の姿勢をとる計測器(計測装置)の長手軸線をx軸、ジャイロ回転軸をz軸、それらに直交する軸をy軸とする座標系を座標系Aとする。なお、Hは水平面である。
【0030】
また、鉛直方向をZ軸、x軸とZ軸を含む面と水平面Hの交線をX軸、X,Z軸に直交する方向をY軸とする座標系をBとする。傾斜センサーで測定したx軸方向の傾斜角をa、y軸方向の傾斜角をbとする。X軸を起点とするジャイロのCCW(反時計方向)回転をθとする。
【0031】
〔A→B座標系への変換〕
B座標系から見たA座標系の軸上の単位ベクトルを(l,m,n)とする。定義より、
lx =cos(a),ly =0,lz =−sin(a) …(1)
mz =−sin(b) …(2)

【0032】
lx mx +ly my +lz mz =0
cos(a)・mx +〔−sin(a)・〔−sin(b)〕=0
mx =〔sin(a)・sin(b)〕/cos(a) …(3)
【0033】
mx 2 +my 2 +mz 2 =1
my =√(1−mx 2 −mz 2 ) …(4)
【0034】
A→Bの変換は、
【0035】
【数1】
よって、A→Bの変換行列は下記式(7)のようになる。
【0036】
【数2】
地球自転軸の方向
【0037】
を満たすΨを求めれば装置主軸から見た真北の角度が分かる。
【0038】
よって、装置主軸の方向角Ψ0 は下記式(12)となる。
【0039】
Ψ0 =−Ψ …(12)
なお、図6において、Lは測定位置における緯度である。
【0040】
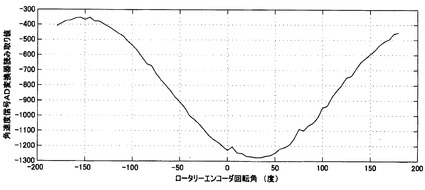
また、図7には、回転角度(ロータリーエンコーダによる計測角度)に対するジャイロ出力実測値の特性が示されており、上記ステップ(1)において求められた平均値に基づいている。
【0041】
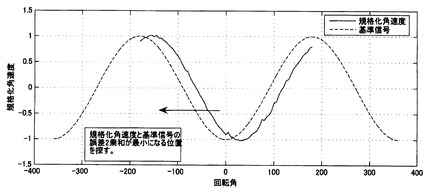
図8には、回転角度(ロータリーエンコーダによる計測角度)に対する、計測したジャイロ出力から、平均ジャイロ出力を差し引き、規格化を行った規格化信号が示されており、ここでは、実線は規格化信号、鎖線は基準信号を示している。
【0042】
図9には、回転角度(ロータリーエンコーダによる計測角度)に対する、基準信号と規格化信号の位相差が示されており、ここでは、点線は規格化信号、鎖線は基準信号、実線は規格化信号が移動した値を示している。
【0043】
このようにして、地中掘削等の外部情報を得られない環境における装置主軸の方位角を的確に計測することができる。
【0044】
図10は本発明の他の実施例を示す計測方式の構成図、図11はその模式図、図12はその計測ユニットが管の中心にない場合の模式図である。
【0045】
つまり、ここでは、光ファイバージャイロ及び傾斜計33より求められる方位(真北)及び重力加速度から計測ユニットの姿勢角を測定する。
【0046】
なお、ここでは、スリーブ管31は剛性の高い掘削管である。
【0047】
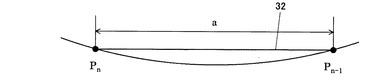
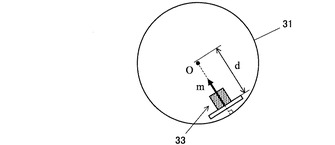
また、図12に示すように、剛性の高いスリーブ管31の中心点Oからずれた位置に光ファイバージャイロ及び傾斜計33が位置する場合においても、計測リンク32はスリーブ管31に対してロール方向に拘束されているので、計測リンク32はスリーブ管31の中心点Oまわりのロールとなる。すなわち、
O=dm+Pn となる。
【0048】
よって、計測リンク32がスリーブ管31の中心点Oになくても中心位置を計測できる。
【0049】
なお、本発明は上記実施例に限定されるものではなく、本発明の趣旨に基づき種々の変形が可能であり、これらを本発明の範囲から排除するものではない。
【産業上の利用可能性】
【0050】
本発明の方位の計測方法は、地中掘削等の外部情報を得られない環境ににおける装置の方位の計測方法に好適である。
【図面の簡単な説明】
【0051】
【図1】本発明の実施例を示す計測ユニットの模式図である。
【図2】高精度の光ファイバージャイロの座標系を示す図である。
【図3】高精度の光ファイバージャイロで地球の自転軸方向を検出するための説明図である。
【図4】座標の定義を示す図である。
【図5】ベクトルA NとベクトルA uの関係を示す図である。
【図6】ベクトルB NとベクトルB uの関係を示す図である。
【図7】回転角度(ロータリーエンコーダによる計測角度)に対するジャイロ出力実測値の特性図である。
【図8】回転角度(ロータリーエンコーダによる計測角度)に対する、計測したジャイロ出力から、平均ジャイロ出力を差し引き、規格化を行った規格化信号を示す図である。
【図9】回転角度(ロータリーエンコーダによる計測角度)に対する、基準信号と規格化信号の位相差を示す図である。
【図10】本発明の他の実施例を示す計測方式の構成図である。
【図11】本発明の他の実施例を示す計測方式の模式図である。
【図12】本発明の他の実施例を示す計測ユニットが管の中心にない場合の模式図である。
【符号の説明】
【0052】
1 リンク支持機構
2 リンク
2B リンク後端支持点
3 台
4 ジャイロコンパス
5A,5B 傾斜センサー
6 二股状のアーム
7 四角形状のリンク
8A リンク支点
9 ピッチ回転軸
10 ピッチ回転軸回りの回転を検出するロータリーエンコーダ
11 ヨー角回転軸回りの回転を検出するロータリーエンコーダ
12 ピッチ回転軸受取付部
13 スリーブ管
21 回転テーブル
22 光ファイバージャイロ
23 x軸
24 y軸
25 z軸
26 地軸
27 角速度検出軸
28 鉛直軸
31 スリーブ管
32 計測リンク
33 光ファイバージャイロ及び傾斜計
【技術分野】
【0001】
本発明は、外部情報を得られない環境における装置の方位計測方法に関するものである。
【背景技術】
【0002】
従来の水平系掘削における位置測定法として、ターゲットが発する電磁波を用いる方法や、レーザ光等の光学的手段を用いてターゲットとの相対角度を測り、位置を算出する方法がある(下記特許文献1,2参照)。
【0003】
また、推進装置内に搭載したジャイロから得られる角度データ、推進装置の傾きを検知する傾斜計からの角度データ及び推進装置の推進距離を計測する距離計からの距離データを用いて装置の水平位置を演算する際、装置内に設置された位置計測用ターゲット板を用いて推進中の装置の水平変位を測量し、その測量データ及び同時に得られるジャイロの回転角データを用いて、推進装置の推進基線に対する初期角度を演算するようにした地中推進装置の初期角度検知方法及び位置連続検知方法が提案されている(下記特許文献3参照)。
【0004】
また、本願発明者らは、比較的小さな径を有する管などの水平系の掘削において、地中の水平方向掘削先端位置を、外部環境および作業環境の影響を受けずに的確に測定することができる、水平方向掘削先端位置の測定装置を提案した(下記特許文献4,5参照)。
【特許文献1】特開平11−023271号公報
【特許文献2】特開2002−48543号公報
【特許文献3】特開平11−107679号公報
【特許文献4】特願2004−352128号
【特許文献5】特願2004−352129号
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した従来技術では、ジャイロ回転軸が鉛直でなく傾斜している場合には、地球自転軸の方向を検出し、装置の方位角を求めることは困難であった。
【0006】
本発明は、上記状況に鑑みて、ジャイロ回転軸が鉛直でなく傾斜している場合において、装置の方位角を的確に計測することができる外部情報を得られない環境における装置の方位計測方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、上記目的を達成するために、
〔1〕外部情報を得られない環境における装置の方位計測方法において、鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないように装置主軸の方位角を計測することを特徴とする。
【0008】
〔2〕上記〔1〕記載の外部情報を得られない環境における装置の方位計測方法において、
(a)光ファイバージャイロを回転テーブル上に配置し、所定角度(例えば5度毎)に回転して停止し、光ファイバージャイロの出力を多数回(1000〜1万回程度)計測して平均を求め、そのときのジャイロ回転角θと光ファイバージャイロの平均出力を記録し、
(b)上記(a)を1回転にわたって繰り返し、ジャイロ回転角度とその位置における平均ジャイロ出力を記録し、
(c)計測したジャイロ出力値から一回転にわたる平均ジャイロ出力値を差し引き、この平均値を差し引いた後の(実効値×√2)で割算して、振幅・オフセットを規格化し、
(d)前記データの点間を補間して所要の角度ピッチで規格化信号を作成し、
(e)計測ユニットの基準軸を原点とし、所要の角度ピッチでもって、360度で1周期になる余弦波を基準信号として作成し、
(f)前記基準信号と前記規格化信号の誤差2乗和を規格化信号をずらしながら演算し、前記基準信号と規格化信号との位相差である、誤差2乗和が最小となるずれ量(前記基準信号との位相差)を演算して、ジャイロ感度軸が最も地軸方向に近づく角度をθ0 とし、
(g)計測ユニットに取り付けた傾斜センサ5A,5BでX,Y軸方向の傾斜角度を測定し、測定位置における緯度は既知であるとして、装置主軸の方位角を求めることを特徴とする。
【0009】
〔3〕上記〔2〕記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における所定角度は5度程度の比較的荒いステップであることを特徴とする。
【0010】
〔4〕上記〔2〕記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における多数回は1000〜1万回程度であることを特徴とする。
【0011】
〔5〕外部情報を得られない環境における装置の方位計測方法において、光ファイバージャイロ及び傾斜計を2点間に渡したリンクの上に設置して、方位と重力加速度を基準とする姿勢角を直接的に計測し、位置の計測を行うことを特徴とする。
【0012】
〔6〕上記〔5〕記載の外部情報を得られない環境における装置の方位計測方法において、前記光ファイバージャイロ及び傾斜計を剛性の高い掘削管本体又は掘削機本体内に設置することを特徴とする。
【発明の効果】
【0013】
本発明によれば、ジャイロ回転軸が鉛直でなく傾斜している場合において、装置の方位角を的確に計測することができる。
【発明を実施するための最良の形態】
【0014】
本発明の外部情報を得られない環境における装置の方位計測方法は、鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないようにする。
【実施例】
【0015】
以下、本発明の実施の形態について詳細に説明する。
【0016】
図1は本発明の実施例を示す計測ユニットの模式図である。
【0017】
この図において、1はリンク支持機構、2はリンク、2Bはリンク後端支持点、3は台、4はジャイロコンパス、5A,5Bは傾斜センサー、6は二股状のアーム、7は四角形状のリンク、8Aはリンク支点、9はピッチ回転軸(y軸)、10はピッチ回転軸9回りの回転を検出するロータリーエンコーダ、11はヨー角回転軸(z軸)回りの回転を検出するロータリーエンコーダ、12はピッチ回転軸受取付部、13はスリーブ管であり、計測ユニットはスリーブ管13内を進むことができる。また、リンク支持機構1は、台3のx,y軸回りの回転を許容している。
【0018】
図2は高精度の光ファイバージャイロの座標系を示す図、図3はその光ファイバージャイロで地球の自転軸方向を検出するための説明図である。
【0019】
これらの図において、21は回転テーブル、22はこの回転テーブル21上に搭載される光ファイバージャイロ、23はx軸(計測器の長手方向)、24はy軸、25はz軸(ジャイロ回転軸)、26は地軸、27は光ファイバージャイロ22の角速度検出軸、28は鉛直軸である。
【0020】
本発明の計測方法の実現方法について説明する。
【0021】
(1)光ファイバージャイロ22を回転テーブル21上に配置し、その回転テーブル21を適当な角度(例えば5度)ごとにz軸25回りに回転させて停止し、光ファイバージャイロ22の出力を多数回(1000〜1万回程度)計測して平均を求める。そのときの回転角θと光ファイバージャイロ22の出力を記録しておく〔図3(a)参照〕。
【0022】
(2)上記を1回転にわたって繰り返し、角度とその位置における平均ジャイロ出力を記録する。
【0023】
(3)上記(2)で求めた各点の平均ジャイロ出力を1回転にわたって平均し、各点の平均ジャイロ出力から差し引き、さらにこの平均値を差し引いた後の(実効値×√2)で割算して振幅・オフセットを規格化する。
【0024】
(4)上記データの点間を補間して所要の角度ピッチで規格化信号を作成する〔図3(a)参照〕。
【0025】
(5)計測器基準軸〔図3(c)参照〕を原点とし、所要の角度ピッチで、360度で1周期になるコサイン波を基準信号として作成する〔図3(b)参照〕。
【0026】
(6)基準信号と規格化信号の誤差2乗和を規格化信号をずらしながら計算し、誤差2乗和が最小となるずれ量(基準信号との位相差)を計算し、ジャイロ回転角θ〔後述の式(10)〕とする〔図3(d)参照〕。
(7)計測ユニットに取り付けた傾斜計(傾斜センサー)5A,5Bでx,y軸方向の傾斜角度を測定し、測定位置における緯度は既知であるとして、装置主軸の方位角Ψ0 〔後述の式(12)〕を計算する。
【0027】
以下、ジャイロ感度誤差の影響を受けない方位測定について詳細に説明する。
【0028】
〔座標の定義〕
図4は座標の定義を示す図である。
【0029】
図4に示すように、任意の姿勢をとる計測器(計測装置)の長手軸線をx軸、ジャイロ回転軸をz軸、それらに直交する軸をy軸とする座標系を座標系Aとする。なお、Hは水平面である。
【0030】
また、鉛直方向をZ軸、x軸とZ軸を含む面と水平面Hの交線をX軸、X,Z軸に直交する方向をY軸とする座標系をBとする。傾斜センサーで測定したx軸方向の傾斜角をa、y軸方向の傾斜角をbとする。X軸を起点とするジャイロのCCW(反時計方向)回転をθとする。
【0031】
〔A→B座標系への変換〕
B座標系から見たA座標系の軸上の単位ベクトルを(l,m,n)とする。定義より、
lx =cos(a),ly =0,lz =−sin(a) …(1)
mz =−sin(b) …(2)
【0032】
lx mx +ly my +lz mz =0
cos(a)・mx +〔−sin(a)・〔−sin(b)〕=0
mx =〔sin(a)・sin(b)〕/cos(a) …(3)
【0033】
mx 2 +my 2 +mz 2 =1
my =√(1−mx 2 −mz 2 ) …(4)
【0034】
A→Bの変換は、
【0035】
【数1】
よって、A→Bの変換行列は下記式(7)のようになる。
【0036】
【数2】
地球自転軸の方向
【0037】
を満たすΨを求めれば装置主軸から見た真北の角度が分かる。
【0038】
よって、装置主軸の方向角Ψ0 は下記式(12)となる。
【0039】
Ψ0 =−Ψ …(12)
なお、図6において、Lは測定位置における緯度である。
【0040】
また、図7には、回転角度(ロータリーエンコーダによる計測角度)に対するジャイロ出力実測値の特性が示されており、上記ステップ(1)において求められた平均値に基づいている。
【0041】
図8には、回転角度(ロータリーエンコーダによる計測角度)に対する、計測したジャイロ出力から、平均ジャイロ出力を差し引き、規格化を行った規格化信号が示されており、ここでは、実線は規格化信号、鎖線は基準信号を示している。
【0042】
図9には、回転角度(ロータリーエンコーダによる計測角度)に対する、基準信号と規格化信号の位相差が示されており、ここでは、点線は規格化信号、鎖線は基準信号、実線は規格化信号が移動した値を示している。
【0043】
このようにして、地中掘削等の外部情報を得られない環境における装置主軸の方位角を的確に計測することができる。
【0044】
図10は本発明の他の実施例を示す計測方式の構成図、図11はその模式図、図12はその計測ユニットが管の中心にない場合の模式図である。
【0045】
つまり、ここでは、光ファイバージャイロ及び傾斜計33より求められる方位(真北)及び重力加速度から計測ユニットの姿勢角を測定する。
【0046】
なお、ここでは、スリーブ管31は剛性の高い掘削管である。
【0047】
また、図12に示すように、剛性の高いスリーブ管31の中心点Oからずれた位置に光ファイバージャイロ及び傾斜計33が位置する場合においても、計測リンク32はスリーブ管31に対してロール方向に拘束されているので、計測リンク32はスリーブ管31の中心点Oまわりのロールとなる。すなわち、
O=dm+Pn となる。
【0048】
よって、計測リンク32がスリーブ管31の中心点Oになくても中心位置を計測できる。
【0049】
なお、本発明は上記実施例に限定されるものではなく、本発明の趣旨に基づき種々の変形が可能であり、これらを本発明の範囲から排除するものではない。
【産業上の利用可能性】
【0050】
本発明の方位の計測方法は、地中掘削等の外部情報を得られない環境ににおける装置の方位の計測方法に好適である。
【図面の簡単な説明】
【0051】
【図1】本発明の実施例を示す計測ユニットの模式図である。
【図2】高精度の光ファイバージャイロの座標系を示す図である。
【図3】高精度の光ファイバージャイロで地球の自転軸方向を検出するための説明図である。
【図4】座標の定義を示す図である。
【図5】ベクトルA NとベクトルA uの関係を示す図である。
【図6】ベクトルB NとベクトルB uの関係を示す図である。
【図7】回転角度(ロータリーエンコーダによる計測角度)に対するジャイロ出力実測値の特性図である。
【図8】回転角度(ロータリーエンコーダによる計測角度)に対する、計測したジャイロ出力から、平均ジャイロ出力を差し引き、規格化を行った規格化信号を示す図である。
【図9】回転角度(ロータリーエンコーダによる計測角度)に対する、基準信号と規格化信号の位相差を示す図である。
【図10】本発明の他の実施例を示す計測方式の構成図である。
【図11】本発明の他の実施例を示す計測方式の模式図である。
【図12】本発明の他の実施例を示す計測ユニットが管の中心にない場合の模式図である。
【符号の説明】
【0052】
1 リンク支持機構
2 リンク
2B リンク後端支持点
3 台
4 ジャイロコンパス
5A,5B 傾斜センサー
6 二股状のアーム
7 四角形状のリンク
8A リンク支点
9 ピッチ回転軸
10 ピッチ回転軸回りの回転を検出するロータリーエンコーダ
11 ヨー角回転軸回りの回転を検出するロータリーエンコーダ
12 ピッチ回転軸受取付部
13 スリーブ管
21 回転テーブル
22 光ファイバージャイロ
23 x軸
24 y軸
25 z軸
26 地軸
27 角速度検出軸
28 鉛直軸
31 スリーブ管
32 計測リンク
33 光ファイバージャイロ及び傾斜計
【特許請求の範囲】
【請求項1】
鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないように装置主軸の方位角を計測することを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項2】
請求項1記載の外部情報を得られない環境における装置の方位計測方法において、
(a)光ファイバージャイロを回転テーブル上に配置し、所定角度に回転して停止し、光ファイバージャイロの出力を多数回計測して平均を求め、そのときのジャイロ回転角θと光ファイバージャイロの平均出力を記録し、
(b)上記(a)を1回転にわたって繰り返し、ジャイロ回転角度とその位置における平均ジャイロ出力を記録し、
(c)計測したジャイロ出力値から一回転にわたる平均ジャイロ出力値を差し引き、該平均値を差し引いた後の(実効値×√2)で割算して振幅・オフセットを規格化し、
(d)前記データの点間を補間して所要の角度ピッチで規格化信号を作成し、
(e)計測ユニットの基準軸を原点とし、所要の角度ピッチで、360度で1周期になる余弦波を基準信号として作成し、
(f)前記基準信号と前記規格化信号の誤差2乗和を規格化信号をずらしながら演算し、前記基準信号と規格化信号との位相差である、誤差2乗和が最小となるずれ量を演算して、ジャイロ感度軸が最も地軸方向に近づく角度θO とし、
(g)計測ユニットに取り付けた傾斜センサでX,Y軸方向の傾斜角度を測定し、測定位置における緯度は既知であるとして、装置主軸の方位角を求めることを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項3】
請求項2記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における所定角度は5度程度の比較的荒いステップであることを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項4】
請求項2記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における多数回は1000〜1万回程度であることを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項5】
光ファイバージャイロ及び傾斜計を2点間に渡したリンクの上に設置して、真北(方位)と重力加速度を基準とする姿勢角を直接的に計測し、方位の計測を行うことを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項6】
請求項5記載の外部情報を得られない環境における装置の方位計測方法において、前記光ファイバージャイロ及び傾斜計を剛性の高い掘削管本体又は掘削機本体内に設置することを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項1】
鉛直でない軸回りにジャイロを回転させ、地球自転軸の方向を検出する方位計測方法であって、ジャイロ感度変化及びオフセット変化の影響を受けないように装置主軸の方位角を計測することを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項2】
請求項1記載の外部情報を得られない環境における装置の方位計測方法において、
(a)光ファイバージャイロを回転テーブル上に配置し、所定角度に回転して停止し、光ファイバージャイロの出力を多数回計測して平均を求め、そのときのジャイロ回転角θと光ファイバージャイロの平均出力を記録し、
(b)上記(a)を1回転にわたって繰り返し、ジャイロ回転角度とその位置における平均ジャイロ出力を記録し、
(c)計測したジャイロ出力値から一回転にわたる平均ジャイロ出力値を差し引き、該平均値を差し引いた後の(実効値×√2)で割算して振幅・オフセットを規格化し、
(d)前記データの点間を補間して所要の角度ピッチで規格化信号を作成し、
(e)計測ユニットの基準軸を原点とし、所要の角度ピッチで、360度で1周期になる余弦波を基準信号として作成し、
(f)前記基準信号と前記規格化信号の誤差2乗和を規格化信号をずらしながら演算し、前記基準信号と規格化信号との位相差である、誤差2乗和が最小となるずれ量を演算して、ジャイロ感度軸が最も地軸方向に近づく角度θO とし、
(g)計測ユニットに取り付けた傾斜センサでX,Y軸方向の傾斜角度を測定し、測定位置における緯度は既知であるとして、装置主軸の方位角を求めることを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項3】
請求項2記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における所定角度は5度程度の比較的荒いステップであることを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項4】
請求項2記載の外部情報を得られない環境における装置の方位計測方法において、前記ステップ(a)における多数回は1000〜1万回程度であることを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項5】
光ファイバージャイロ及び傾斜計を2点間に渡したリンクの上に設置して、真北(方位)と重力加速度を基準とする姿勢角を直接的に計測し、方位の計測を行うことを特徴とする外部情報を得られない環境における装置の方位計測方法。
【請求項6】
請求項5記載の外部情報を得られない環境における装置の方位計測方法において、前記光ファイバージャイロ及び傾斜計を剛性の高い掘削管本体又は掘削機本体内に設置することを特徴とする外部情報を得られない環境における装置の方位計測方法。
【図1】

【図2】

【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図9】

【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−263689(P2007−263689A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−88097(P2006−88097)
【出願日】平成18年3月28日(2006.3.28)
【出願人】(000173784)財団法人鉄道総合技術研究所 (1,666)
【出願人】(500519987)株式会社ジェイアール総研情報システム (14)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月28日(2006.3.28)
【出願人】(000173784)財団法人鉄道総合技術研究所 (1,666)
【出願人】(500519987)株式会社ジェイアール総研情報システム (14)
【Fターム(参考)】
[ Back to top ]